模块化多电平直流输电系统信号稳定及噪声优化研究
2021-01-21郭能星
郭能星 王 雪 朱 颖
(1、三峡大学电气与新能源学院,湖北 宜昌443002 2、三峡大学计算机与信息学院,湖北 宜昌443002)
1 概述
多端HVDC (MTDC)电网被认为是一个可行的选择,以容纳大量的可再生能源进入电力系统[1]。除了一些专门设计来解决故障[2]的特定拓扑之外,半桥模块化多电平变换器(MMC)是目前用来构建这种电网的首选变换器拓扑,它的抗过电流能力有限。
本文分析研究了基于MMC 的直流输电系统中这种大型直流电抗器的稳定性问题。本文重点研究了功率控制模式和电压控制模式。由于较高的dv/dt 和di/dt 下的噪声源较强,加上紧凑的SM设计[3]使得耦合更紧密,噪声问题变得更加严重。本文论证了在每种控制模式下局部稳定性问题的产生,并描述了在设计这些控制器时可能要考虑的修正措施。
2 直流系统的稳态控制策略
2.1 稳态分析
当带有弱阻尼输入滤波器的直流电源负载试图保持功率常数时,可以观察到直流母线电压的振荡。在最先进的MMCs 中(见图1),当具有较大直流电抗器的DCCBs 安装在MMCs 的直流端时,阻尼减小,系统可能会遇到类似[4]的稳定性问题。在下面,简要地回顾了这个负阻抗不稳定性问题,并通过一个简单的二阶模型说明了直流电抗器可能造成的不利影响。
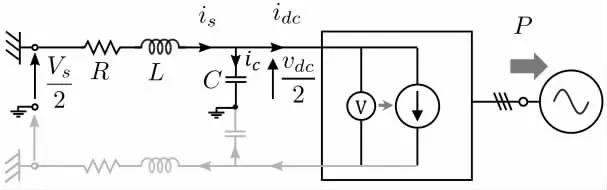
图1 一个单转换器集总参数模型
此系统的动态过程可以用以下微分方程表示:
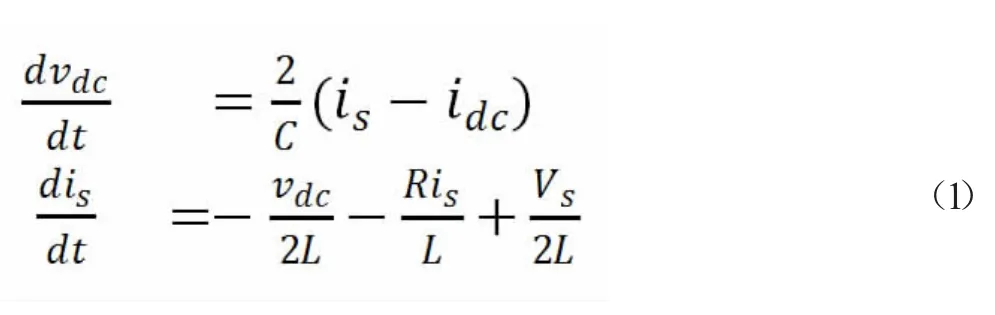


在实际中通常满足的条件R2C <L 下,最大运行功率受以下渐近稳定性条件限制:

2.2 特征值分析
为了进一步分析系统的稳定性和控制参数的影响,在Matlab/Simulink 中开发了更详细的系统模型。它由两个MMC 站MMC 1 和MMC 2 组成,这代表了MTDC 电网中的两种控制模式,即电压控制模式和功率控制模式。MMC 1 为电压控制模式,这里采用电压下垂法,这是MTDC 电网运行中常用的控制方法,而MMC 2 为恒功率模式,遵循给定的功率设定值:

图2 MMC 和内部控制的方框图
图2 展示了外部控制器方案。所实现的控制设计基本符合,MMC 的总能量可由直流电源或交流电源控制。将所建立的模型与关联控制相结合,进行了特征值分析。
3 信道噪声模型分析
考虑SVSN 的MMC 模型:
在MMC 开关模型中,SVSN 可以通过增加SM 的等效电路来引入。与传统的MMC 模型相比,在SM电压采样电路中集成了一个噪声单元(即考虑SVSN 对VSM的影响的VSMV)。如果噪音低,α 可以设置为0, 而在高噪声环境下, 也广泛应用于MMC 模拟,类似与平均模型通过添加噪声单元(7)。
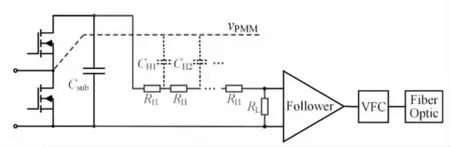
图3 基于SVSN 的SM 电压传感器原理图
SM电压传感器的等效电路已在图3 中给出,通过对采样周期内的脉冲进行计数,可以得到平均电压。噪声耦合可以用分压器的PCB 轨迹和SM 的中点(即vPWM)之间的寄生电容CHi(i = 1,2,…,N)来建模。在高dv/dt 环境下,SVSN 通过耦合影响MMC 的运行。在±100 kV 高压直流输电系统中,包括有SVSN和没有SVSN。最近的电平调制应用于10 kHz 开关频率的SM。由于电压平衡控制,SM 需要在插入模式(D = 1)和旁路模式(D= 0)之间进行切换,导致占空比发生变化(例如,410 V 峰值SM电压相对于不使用SVSN 的170 V)。

图4 考虑SVSN 的仿真和实验结果- 平均模型
在MMC 的SM 中,SVSN 是通过分压器和SM 中点之间的寄生电容耦合的。噪声大小是由占空比的变化决定的。
以上分析表明,通过减小直流功率控制的动态响应带宽,可以减轻大型直流电抗器在恒功率工况下的稳定性限制。该反馈控制器基于简单的PI 控制,并采用适当的整定方法,可实现直流功率控制的闭环带宽,扩展稳定工作区域。
4 下垂算法增益影响
与其他电源转换器相比,具有易于扩展性、高电压质量、滤波器尺寸小等优点。在电压下垂控制中,下垂增益决定了站点对直流电压波动的贡献程度。当下垂增益g 定义为功率偏差与电压偏差的商,即g =△P/△vdc 时,随着下垂增益的增大,对给定电压偏差的贡献程度也增大;因此,需要更快的功率控制。本节分析系统稳定性对分配的下垂增益和直流电源控制器的时间响应的依赖性。因此,为了保证系统的稳定性,必须避免下垂增益的过大值。
5 结论
本文分析了基于mmc 的直流输电系统在变流器直流侧端安装大型直流电抗器时可能出现的潜在不稳定性问题。这种不稳定性问题被称为负阻抗不稳定性,在某些条件下会对高压直流输电系统的运行造成严格的限制。然后,通过减小闭环功率控制的带宽,可以有意地增大系统的稳定裕度。过高的直流电压下降增益会导致系统不稳定。所提出的切换模型和平均模型与实验结果吻合。该模型可以描述电机的电压不平衡和臂电流谐波。
虽然从静态的角度来看,较大的下垂增益是首选的,但所获得的结果表明,必须仔细注意下垂增益的调整,以避免侵略性的动态和确保系统的稳定性。