基于双模糊控制的智能窗帘电机速控锁光算法①
2021-01-21胡笑钏徐如梦范子祎
张 雨,胡笑钏,徐如梦,范子祎,赵 亮,惠 洋
(长安大学 电子与控制工程学院,西安 710064)
在智能技术不断发展创新的今天,智能家居受到了广泛关注和使用,智能窗帘作为智能家居中必不可少的部分,极大影响着室内生活环境和居家生活品质[1-3].除解放双手、感应开合外,各种各样的拓展功能如防盗报警、远程控制等,在很大程度满足了人们对极致生活的追求,成为了居家生活不可或缺的好帮手.
目前市场上生产的智能窗帘在使用中仍存在较大弊端,其反应、调节、控制的时间跨度较大,整体的控制效果受天气等自然因素影响,窗帘系统的抗干扰能力和稳定性也较差[4-8].因此,找到一种更加智能化、自动化、灵敏化,同时具有较强鲁棒性的方式来控制家用窗帘已经成为大势所趋.
基于此,本文提出一种能够实时检测室内光照强度,并依据人体最适宜的环境标准自动调节被控窗帘开合程度的新型智能锁光窗帘控制算法,将模糊控制算法与模糊自适应控制算法相结合并应用到锁光系统中[9-13],使其具有可实时调节窗帘位置、保证室内采光充足、调节速率快、自动控制等优点,极具市场价值.
1 整体控制方案
本文设计的智能锁光窗帘控制系统使用的主控芯片为STC32F1,外接有电机运动控制、电机驱动、智能检测、液晶显示4 个主要模块,其整体功能框图如图1所示.
图1中,电机运控模块共有3 种基础控制方式,分别为定时控制,锁光控制和远程控制.其中,定时控制可根据定时打开或关闭窗帘,锁光控制可自动将室内光强锁定在最优状态,远程控制可利用手机软件远程控制窗帘开闭.本文将对基于双模糊控制的锁光控制方式的优化算法进行详细阐述.
2 光控系统模型构建
假定室内宜居光照强度为 φ0,阳光通过窗户无遮挡射入室内的面积为S(S可表征窗帘的开合程度),光照传感器在采集频率f下得到t时 刻室内光强为φ (t),光照强度的必要调整值为eφ(t),光照强度必要调整值的变化率为ecφ(t),直流电机在t时 刻的输入电压为u(t),对应的转速为n(t) .容易得到eφ(t)和ecφ(t)的表达式如式(1)所示.
改变直流电机的输入电压,电机转速会随之产生规律性变化,故选择调节u(t)的方式来控制系统.以eφ(t)和ecφ(t)为 输入、u(t)为输出建立双输入单输出的模糊控制器FC,最终得到的输出曲线即为u(t)的变化方式.不同的输入电压可使直流电机产生不同的转速,并通过加入PID 控制的方式,使电机转速迅速达到预想转速.
而当u(t)具有时变性、不确定性和非线性特性时,若要求n(t) 迅速到达当前电压u(tx) 对应的转速n(tx),普通的PID 控制往往难以调节的十分精准,故将其替换为模糊自适应PID 控制器F,从而在最短时间内令n(t)=n(tx).
图2为光控系统模型的执行机构.可以看出,通过改变u(t) 智能调节n(t),进而改变S的大小;通过改变S对φ (t)进 行必要的调整,同时使eφ(t) 趋零.当eφ(t)=0时(即 φ(t)=φ0时),S=Sbest,u(t)=0,n(t)=0,室内光强达人体最宜居状态.
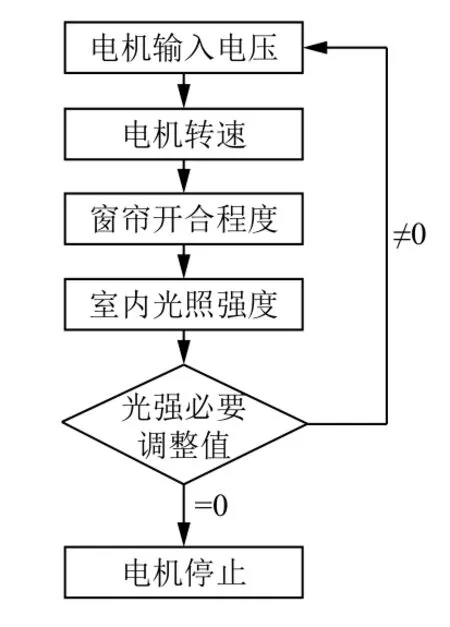
图2 模型的执行机构
3 设计模糊控制器
图3所示为模糊控制系统的工作机理.在模糊控制系统中,传感器将采集到的物理量转换为连续的电信号,由 A/D 转换器将这种电信号变为精确的数字量,同时与给定值进行比较,得到偏差e输入到模糊控制器中.偏差e经模糊化处理为模糊集合E,根据既定规则对集合E进行模糊推理可得模糊控制量U,解模糊后得精确输出u.用D/A 转换器将输出u转换为模拟量,并通过相应的执行机构作用于被控对象,使其准确快速地达到期望状态.

图3 模糊控制流程
3.1 模糊控制器FC
设定室内最宜居光强为 2 00 lx,室内可达到的最大光强值为4 00 lx,最小值为0,如式(2)所示.

将式(2)代入式(1),则有:

将eφ(t) 模糊化为Ex,取论域为[-200,200];将ecφ(t)模糊化为Ecx,取论域为[-400,400].两个输入均设定3 个语言值P、O、N.
直流电机的电枢电压计算公式为:

式中,△Us为 电刷压降,Ia为电枢电流,Ra为电枢绕组电阻,Ce为 电机常数,φ为电机气隙磁通.由式(4)可知,u(t) 与n(t)呈线性关系.若电机正转可打开窗帘,则当eφ(t)>0 时,可令u(t)>0,趋使n(t)>0,达到电机正转、S增大的目的;同理,当eφ(t)<0 时,可令u(t)<0,趋使n(t)<0,电机反转.
将u(t) 模糊化为U作为控制器的输出,论域为[-15,15],设定3 个语言值P、O、N.模糊控制器FC 的输入输出关系设置如图4,解模糊的算法采用Mamdani 推理法[14,15].

图4 控制器FC 输入输出关系
3.2 模糊PID 控制器F
将n(t) 对应的反馈电压uα(t) 与输入电压u(t)的差值e及差值变化率ec模糊化为E、EC作为控制器的输入.论域为[-20,20]和[-40,40],模糊化后的子集E、EC={NB,NM,NS,ZO,PS,PM,PB},图5为E、EC的隶属函数曲线.
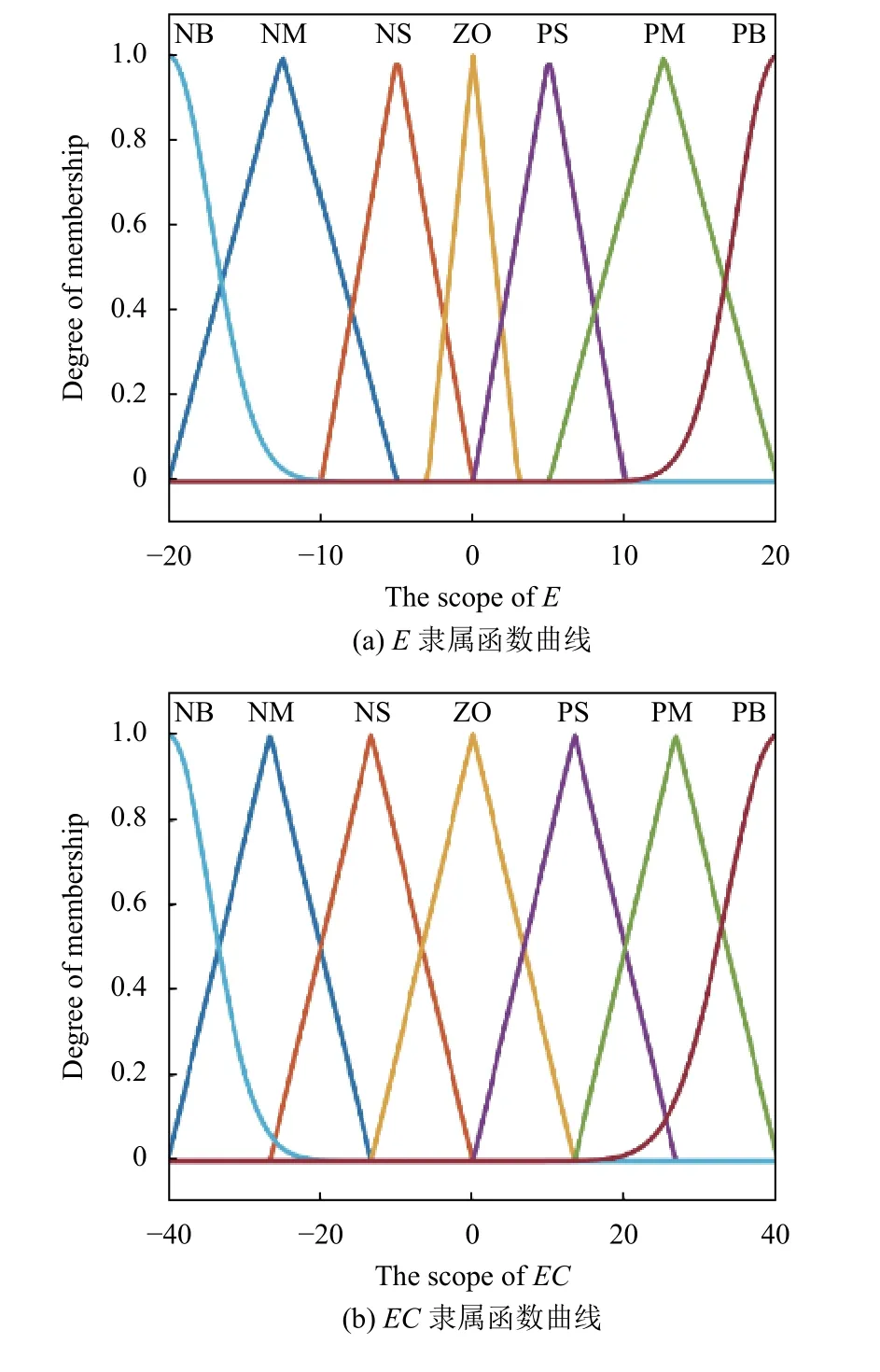
图5 E、EC 隶属函数曲线
输出为PID 控制器3 个参量Kp、Ki、Kd必要变化量的模糊量Kp、Ki、Kd,且Kp、Ki、Kd={NB,NM,NS,ZO,PS,PM,PB},设置论域为[-3,3]、[-1,1]、[-0.05,0.05].其隶属函数选择为三角函数.
在建立模糊规则时需要考虑到,E变大时向减小E的方向调节,E变小时保持系统稳定.如在系统调节初期,当实际值比标定值小很多且仍在不停的以远离标定值的方式变小的情况下,为将实际值拉回,必须大幅增加Kp以加快调节,大幅减小Ki以使系统获得较快的动态响应,同时适当增大Kd减少不必要的超调量.上述描述可用模糊条件语句表示为 ifE=NB andEC=NB thenKp=PB andKi=NB andKd=PS.表1~表3为控制器F 具体的49 条模糊规则.

表1 Kp 模糊控制规则表

表2 Ki 模糊控制规则表

表3 Kd 模糊控制规则表
4 搭建算法框架
模糊控制器FC、F 设计完成后,将其与软件算法结合,得到锁光控制方式的优化算法.系统在接收到用户的设置信号或到达智能调整时间时,将自动运行模糊算法进行控制系统中参数的自调整,实现对室内光照强度的调节.
如图6,将模糊规则表、输入输出论域与隶属函数写入STM32 核心控制芯片的存储器中,保证控制器在参数整定时可直接对模糊规则表进行寻址确定输出.

图6 压控阶段算法
按照设定的采样频率f,传感器将定时对其控制区域的光强进行采样,经IIC 总线传输至单片机得到当前光强值 φ(t),单片机计算φ (t)与 标定值 φ0的差值并将其作为控制器FC 的输入,进而得到电压值u(t)的必要变化.
系统采集uα(t) 与u(t)对比产生差值并作为控制器F 的输入,进而确定PID 控制3 个参量的必要变化量△Kp、△Ki、△Kd,并对单片机输出的PWM 脉冲信号即时调整,直到uα(t)=u(t),完成窗帘的自适应锁光调整,如图7所示.
5 Simulink 仿真分析
直流电机的电压平衡方程为:

式中,E=Cen为电动机在额定励磁下产生的反电动势.在零初始条件下,对式(5)进行拉普拉斯变换,可得如下表达式:

直流电机的转矩平衡方程为:

式中,Te为 额定励磁下的电磁转矩,TL是包括电机空载转矩在内的负载转矩,IL为 负载电流,GD2为飞轮惯量,Cm=30/πCe.整理式(7)并求其零状态下的拉氏变换,可得到:

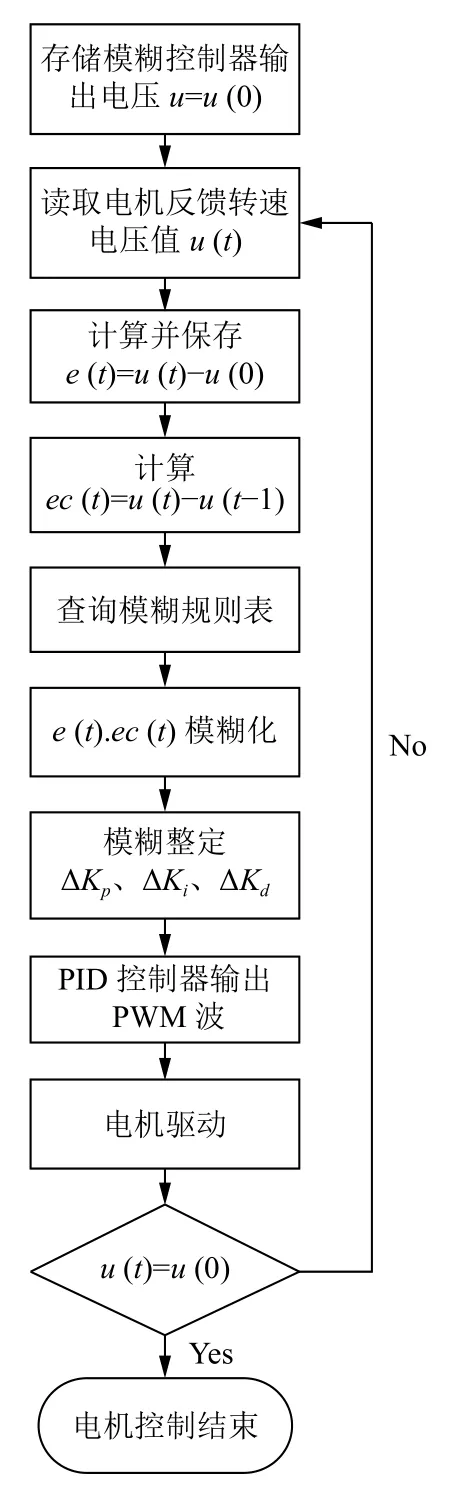
图7 速控阶段算法
选定直流电机的参数如表4所示[16-21].表4中UN为额定电压,IN为额定电流,nN为额定转速,Ce为反电动势系数,Ra为电枢回路总电阻,Tl为电枢电路电磁时间常数,Tm为电力拖动系统时间常数,α为转速反馈系数根据式(6)、式(8)及表4各项参数可建立直流电机的Simulink 模型如图8所示.在该模型的基础上搭建整个光控系统的模型并进行双模糊控制算法的仿真测试.

表4 直流电机参数

图8 直流电机仿真模型
图9为使用Simulink 中的Signal Builder 模拟传感器采集到的数据.预设光强标定值φ0=20 lx,传感器实时采集当前光强φ (t)的变化情况如图9所示,计算出eφ(t)和ecφ(t)并模糊化作为模糊控制器FC 的输入,输出曲线如图10所示.

图9 传感器数据曲线

图10 u(t)变化曲线
以图10所示曲线控制电机变速,分别使用PID 控制器与模糊PID 控制器F 控制图8中的电机模型,得到n(t)的变化情况为图11、图12.

图11 n(t)变化曲线(空载)
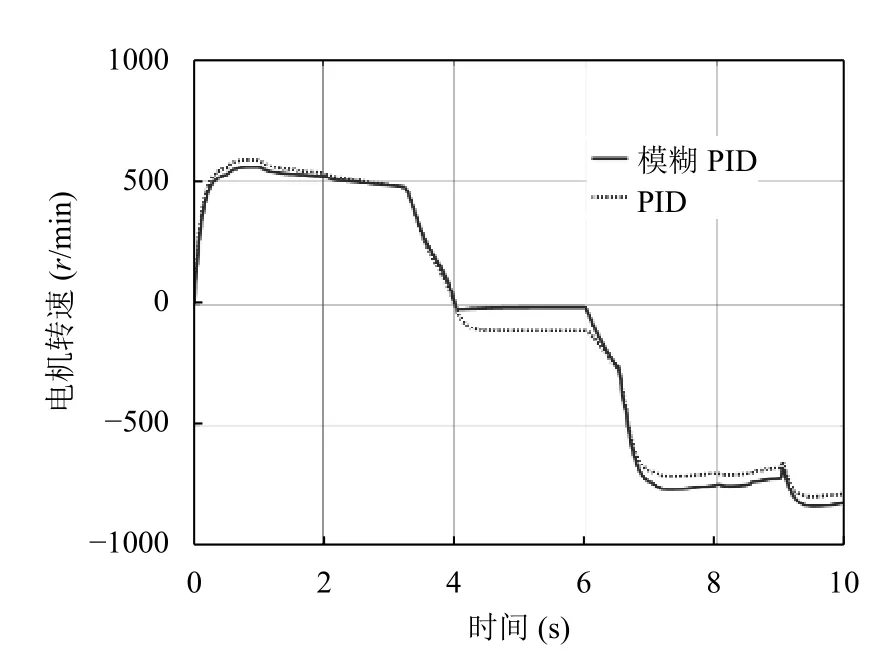
图12 n(t)变化曲线(带载)
可以看到,用普通PID 的方式调节n(t)会产生明显的偏差,使eφ(t)趋零的调整时间过长,而使用模糊PID控制器则更加快速、准确.
6 结论
本文设计并实现了一种应用于智能窗帘锁光控制的双模糊控制算法,该算法能在当前光照强度及其偏差值不断变化的情况下,实时对锁光系统的参数进行调整,并得到准确的系统反馈值,及时修正调整过程中的偏差,保证了控制过程的快速与准确,具有很好的应用前景和市场价值.
