水下无人航行器水下无线充电关键技术研究
2021-01-19丰利军朱春波张剑韬余林刚
丰利军,朱春波,张剑韬,余林刚
(1. 中国人民解放军92942 部队,上海 200235;2. 哈尔滨工业大学,黑龙江 哈尔滨 150001)
0 引 言
目前,海洋观测设备的能源主要来自水面船舶电缆或海底电缆,无缆设备则依赖于自身储能装置。海底电缆工程的建设受地域建设条件、海洋工程条件和施工设备等条件的限制,涉及技术领域广泛,投资规模较大,施工技术复杂。无缆设备受限于自身储能装置的容量,其布放范围以及自持能力都受到严重制约。无线电能传输技术由于采用非接触方式实现能量传递,具有安全性高、环境适应性强等优点,将成为解决水下传能问题的有效手段。
如图1 所示,水下无人航行器(UUV)除执行本身任务以外,同时还可设计成电能载体,建立以电能载体UUV 为中转的海洋能量网络。一方面,UUV 可以从母船、漂浮能源岛、水上风机、或水下有缆充电桩获取能量,增加自身作战半径;另一方面,水下的探测设备如水下声呐设备、水下机器人等可以从UUV获取电能以增加自持能力和扩大布放范围。
1 水下无线充电技术优势
采用传统的直接接触式充电方式,必须设计复杂而严密的密封结构,制成湿插拔接口,但其制作工艺和结构复杂,且存在漏水、漏电等安全隐患、插拔操作过程复杂、安装定位精度要求高、使用寿命短等弊端。特别是在近海防卫、水文监测、远洋水下预警以及水下导航等领域的应用,接触式充电方式将极大地限制UUV 机动能力。主要体现在由于受供电线缆长度、海水腐蚀、自身储能装置的容量以及能源补给方式的制约,水下探测设备的布放范围以及UUV 检测距离均受到严重制约,隐蔽性也难以保障。
利用水下无线电能传输技术所具有的安全性强、自动化水平高、隐蔽性强的优势,可以更好地解决水下探测设备的电能补给需求。在当今建设海洋强国新形势下,水下无线电能传输技术应用场景非常广泛,可极大地提高海洋作业的自动化程度,解除海洋物联网的节点布局限制,提高UUV 作战半径与自主能力等。
无线充电技术带来的技术优势如下:
1)UUV 隐蔽性好。不再需要用水面舰只收回充电或换电;
2)UUV 可配置多种能量来源。水面或水下船只,水面或水下能源岛,水下有线供电网络;
3)水下探测系统、传感器系统、导航系统、武器系统等用电设备,可以不依赖于有线供电网络,由能量载体UUV 进行巡回补电。
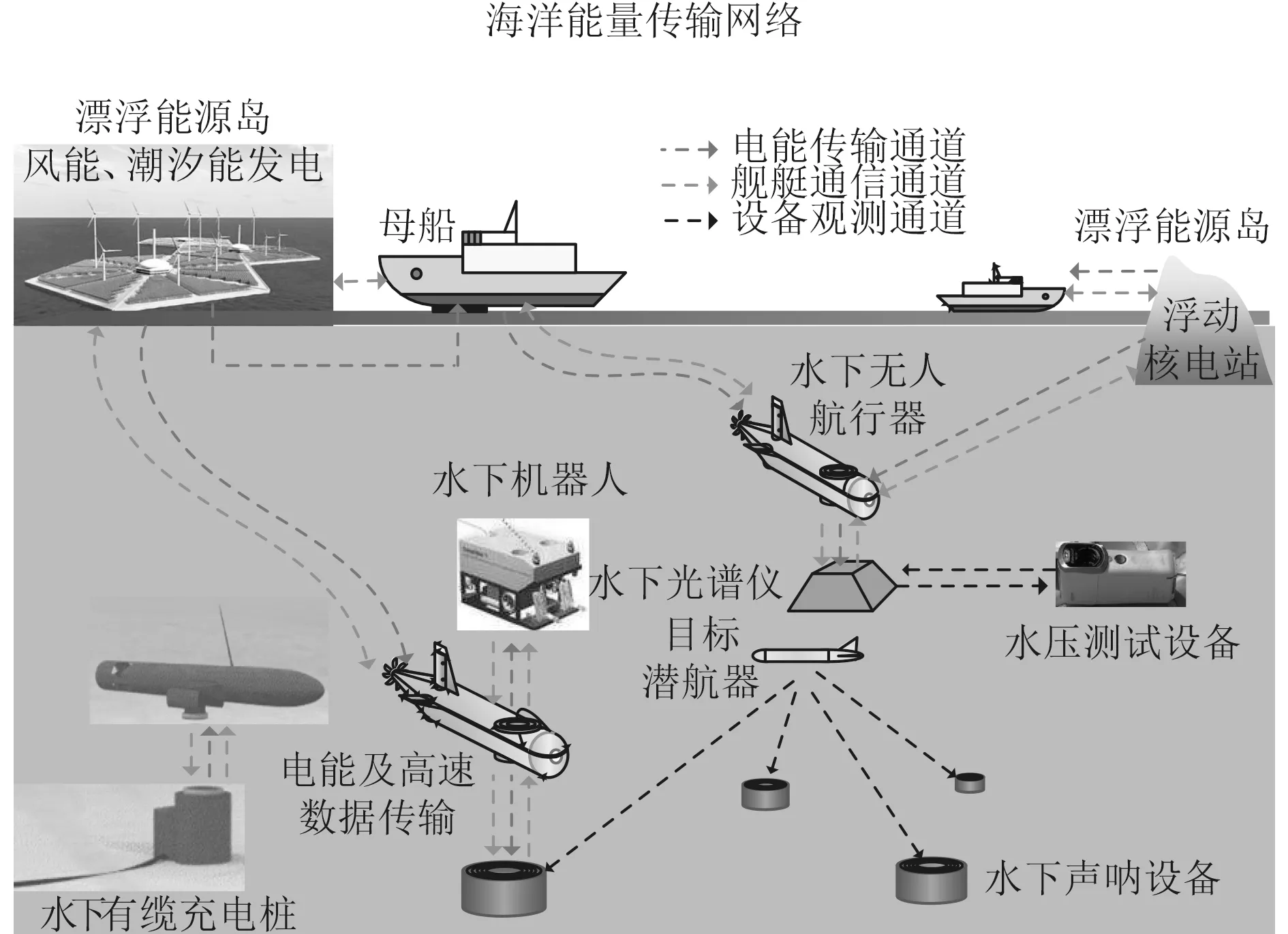
图 1 水下无线供电体系示意图Fig. 1The schematic diagram of WPT for UUV
2 国外研究现状
最早将无线能量传输技术应用到水下领域的是麻省理工学院(MIT)与伍兹霍尔海洋研究所(WHOI),将 OdysseyII 水下航行器用于海底采样网络,通过海底采样网络的靠泊系统实现无线充电[1-2]。
2012 年,由美国海军研究办公室指挥,潜艇部队参与组装及测试的水下无人航行器对接充电项目完成了试验。该项目成功测试了水下坞站技术的相关功能,即水下无线能量传输和水下数据交换等功能。其中水下无线充电功率为450 W[3]。2013 年,日本NEC公司发表了一篇有关水下非接触充电装置能量和信息同步传送的文章[4],它摒弃了以往水下充电装置依赖声呐的通信方式,取而代之的是通过选取不同的变压器工作频率,使之既可以传输能量,又可进行信息传送,其中能量传输频率为1 MHz,信息载波频率为92 MHz,信号传输频率为20 MHz。
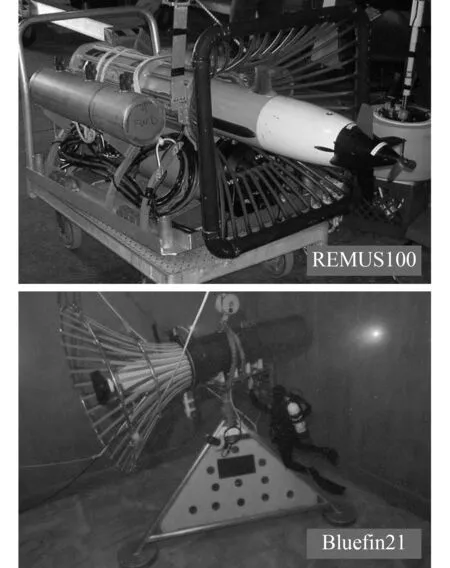
图 2 水下潜航器无线充电平台Fig. 2Platform of WPT for UUV
2015 年,Carderock[5]领导他的团队与美国海军海底作战中心联手开始在马里兰州西贝塞斯达总部,用被弄脏以及加盐的水来模拟实际的海洋环境,在6 000加仑的水箱内进行将数据和能量以无线方式自动从“水面母舰”传输到UUV 的系统演示,并且在演示过程中寻找提高传输系统可扩展性的可能性,使其可以运用到其他平台上去。
2017 年,美国太平洋空间与海战系统司令部的海军科学家开发了一种使用无线技术为水下无人航行器充电的方法,其设想是在海底布设有缆充电桩,水下无人航行器通过自主停靠在充电桩获取电能,这种技术将扩大水下无人航行器的执行任务范围[6]。
针对UUV 在水下与能量基站进行无线电能传输难以实现发射和接收端精密对准,从而不能获得较高传输效率的问题,美国海军近岸作战司令部太平洋实验室的Sean Patten 与美国海军于2017 年联合开发出一种发射线圈与接收线圈“软连接”的耦合机构方案,其特点是发射线圈系统“嵌套在”接收线圈系统中[7]。该系统的发射线圈系统由非平面锥形发射线圈(线圈绕制在非平面锥形铁氧体上)、围绕在发射线圈外的绝缘外壳组成;该系统的接收线圈系统由铁氧体插头,绕制在铁氧体插头柱状部分的接收线圈以及包络在外的半球形(凹形)绝缘层组成。该系统的软连接方式如图4 所示。
虽然世界各国研究机构仍在不断进行水下无线电能传输技术的研究[8-10],但仍然存在一些关键技术问题有待研究,其中包括:深水应用的磁耦合机构结构、海水介质中损耗特性与传输特性、系统鲁棒控制技术、能量和信息同步传输技术,以便最大限度提升系统工作性能,保证系统的安全、可靠、稳定、高效运行。
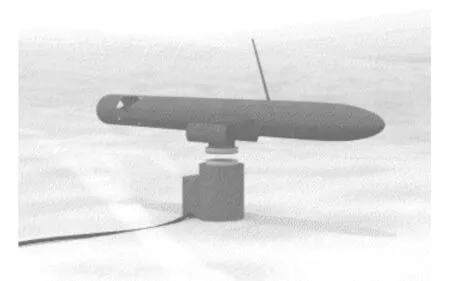
图 3 美国军方为UUV 无线充电的设想Fig. 3U.S. military's vision for wireless charging of UUV

图 4 美国海军为UUV 无线充电耦合机构软连接方式Fig. 4U.S. Navy soft connection mode for UUV wireless charging coupling mechanism
3 关键技术研究
3.1 深水应用的磁耦合机构结构设计
目前,有关水下磁耦合机构主要采用2 种结构,分别是无磁芯和有磁芯结构。在无磁芯结构研究过程中,有人基于无磁芯结构,在重点分析了海水和空气不同介质中系统传输功率、副边电流及效率的关系后,提出一种锥形线圈结构,该磁芯结构相对于螺旋形磁芯结构,可在提升传输效率的同时抑制水下暗流对系统传输能量的影响,这种无磁芯磁耦合结构,虽然可极大降低耦合机构的体积和重量,减少UUV 负荷,增加其机动性,但耦合系数较低,工作频率高,漏磁严重,传输效率较低,且结构复杂,线圈散热较为困难,很难提升功率级别。
而在有磁芯结构研究过程中,先后有人提出过原边与副边带磁芯的磁耦合结构以及环形电磁耦合器。前者虽然提高了传输效率,但该耦合机构会增加UUV载重,增加电能损耗的同时,也极大地降低了其机动性。后者虽具有良好的电压稳定性和较高的效率,但该电磁耦合器中间的环形空间部分较大,且在工作过程中该空间流有主磁通,从而导致这部分空间的海水中产生一定的涡流损耗,降低了系统的传输效率,同样该耦合机构会增加UUV 载重,增加电能损耗的同时降低了其机动性。
3.2 海水介质中能量传输和涡流损耗特性研究
水下无线电能传输系统在工作过程中采用非接触方式进行能量传递,因此在传能过程中具有安全性高、无需精确定位等优势,使之非常适合应用到水下等恶劣环境中。然而,由于水介质相对于空气介质在介电常数和电导率方面有所不同,使得水下与常规空气中应用的无线电能传输系统在模型结构及传输特性上存在较大差异。通过表1 可以看出3 种介质的磁导率几乎没有差别,即3 种介质的相对磁导率与真空近似,但其电导率和介电常数存在较大的差异,其中海水的电导率最大,其次是淡水,而在空气中电导率并不存在。水介质中电导率的存在会产生高频涡电流而引起涡流损耗,从而影响了磁耦合机构传输效率。水的相对介电常数为81,因此水下磁耦合机构模型要考虑两线圈间的电容效应。
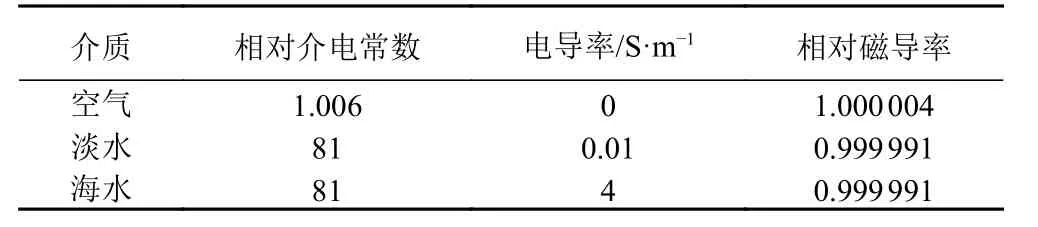
表 1 三种介质参数对比Tab. 1 Comparison of parameters under three mediums
目前,基于海水介质建模方面的研究较少。一些研究团队在水下磁耦合机构建模过程中,有些虽然考虑了水下涡流损耗对系统传输效率的影响,但仅考虑了工作电流而并未考虑工作频率对水下涡流损耗的影响,同时也未能考虑水下电容效应对水下磁耦合机构模型及传输性能的影响;有些虽考虑了工作频率对水下涡流损耗的影响,并在水下磁耦合机构模型中引入了两线圈间的寄生跨接电容,但未考虑工作电流对水下涡流损耗的影响,也未对寄生跨接电容对系统传输性能的影响做深入硏究。
3.3 水下双向无线电能传输电路拓扑及快速鲁棒控制策略
有关水下无线电能传输控制技术方面,主要分为原边控制、副边控制和双边控制等3 种控制方式,不同控制策略优缺点比较见表2。
1)原边控制方式。
首先通过理论推导给出了原边补偿电容端电压Vc1的表达式,后根据采集获得的原边线圈电压与电流间的相位得到Vc1的实部与虚部,进而可估算出互感值M,利用Vc1的实部和M 可计算出输出电压Voref,该计算电压值在与给定输出电压值Voref相比较后的差值,经PI 调节器后产生开关管驱动信号,最后通过控制线圈电流以达到控制负载端电压的目的。
2)副边控制方式。
一种副边控制方式是在整流电路后加入Buck 变换器,利用状态空间平均法建立小信号模型,基于极配置法设计PI 控制器,实现恒功率或最大效率控制。另一种是基于可控整流和滞后比较器的副边控制方法,对输出功率或最大效率进行控制。

表 2 不同控制策略优缺点比较Tab. 2Comparison of advantage and disadvantage between various control strategy
3)双边控制方式。
可分为双边无通信与通信控制2 种方式。经典的双边无通信控制方式,它的原边部分由全桥结构和LCL 谐振网络构成,所采用的控制方法是通过变频控制方式保证变压器原边线圈的恒流输出,副边部分采用并联补偿结构,经不控整流和 Boost 升压变换器对负载进行能量调节。双边通信控制方式是将原副边相结合,提出基于工作频率调制和双边无线通信的闭环控制方法,实现无线充电。
对于无线电能传输的鲁棒控制策略,目前普遍采用PI 控制算法,控制参数一般通过极点配置法选取,控制策略较为简单且易于实现。但是现有的建模方法与控制策略通常忽略无线电能技术实际应用中的多种不确定扰动因素。系统动态响应特性以及多参数扰动下快速鲁棒控制器的设计研究亟待进行。
3.4 水下能量和信息同步传输技术
在水下无线电能传输的应用场景中,母船、UUV与水下探测设备之间不只存在能量交互同时也存在信息传递,因此还需要研究海水中无线电能与信息同步传输技术。需要从嵌入式双向水下耦合机构出发,采用双边LCC 补偿谐振拓扑,以及改进型注入式磁耦合通信技术与能量调制型FSK 通信技术,实现海水中电能与信息的同步传输。以下问题亟待解决:
1)研究基于嵌入式耦合机构的注入式磁耦合通信技术优化方案
针对无线电能与信息同步传输技术受耦合系数影响显著的问题,为此可设计出一种嵌入式耦合机构,该耦合机构便于原副边对准,抗偏移能力强,耦合系数大,因此基于嵌入式耦合机构的注入式磁耦合通信技术是其中的难点。
2)研究复合谐振拓扑LCC 结构的传输特性
针对电能传输对于信息传输的干扰问题,需要研究双边LCC 谐振补偿网络。LCC 结构具备多个谐振频点,当原边与副边均采用LCC 补偿拓扑时,选取原边与副边不同的谐振频点进行搭配时,可以使得系统具备多种传输特性,因此需要从对称与非对称2 个角度对其进行详细的分析。
3)研究基于LCC 补偿谐振拓扑的能量调制型FSK 通信技术以及全双工磁耦合通信技术
针对目前的磁耦合通信技术均只能实现单工与半双工通信的问题,需要研究双边LCC 结构通过参数设计,进而实现具备两个输出特性相同的谐振频点,保证功率传输稳定性的前提下实现能量调制型FSK 通信技术。
4 结 语
本文分析水下无线充电的技术优势,研究不同国家及机构对UUV 水下无线充电技术的最新研究成果,针对水下无线充电在磁耦合机构设计、海水介质中能量传输和涡流损耗特性研究、水下双向无线电能传输电路拓扑及快速鲁棒控制策略、水下能量和信息同步传输技术等4 个方向展开了深入讨论,为UUV 水下无线充电技术的发展应用奠定一定基础。
