水电站GIS设备内部异物识别技术研究
2021-01-16马飞越牛勃佃松宜赵涛倪辉陈磊
马飞越 牛勃 佃松宜 赵涛 倪辉 陈磊










摘要:GIS设备作为水电站内电力送出的关键设备,其内部异物引起绝缘击穿是GIS设备占比最大的故障,直接影响着水电站的效益。由于GIS设备筒体较长,在设备安装及开展检修工作时,其内部毫米级异物难以通过经验判断。为了更加有效地检查识别GIS管道内的异物,对比分析了超声波、电磁波、光学不同类型的识别方法对GIS内部异物的有效性。研究了将光学敏感法和光影法相结合的异物识别方法,并设计了基于双光源补光的异物识别算法,将其搭载在GIS设备内部异物检查机器人上实现了应用。应用结果表明:采用双光源补光的异物识别方法,可有效准确地识别出GIS腔体场景中的毫米级异物,准确率可达95%以上。
关 键 词:GIS设备; 异物识别; 光影法; 机器人; 水电站
中图法分类号: TM622
文献标志码: A
DOI:10.16232/j.cnki.1001-4179.2021.12.026
0 引 言
截至2020年,中国常规水电装机容量约为3.5亿kW,年发电量为13 220亿kW·h。水电站内重要的一次设备主要包括水轮机、发电机、变压器及气体绝缘封闭开关设备(Gas Insulated Switchgear,GIS)等,其中,GIS设备主要由断路器、互感器、隔离开关、接地开关、避雷器、母线、连接件和出线终端等元件组成,全部封闭在金属接地外壳中的高压装置[1-3]。近年来,随着水资源利用及建设步伐的加快,GIS设备装用量迅速增长,GIS设备引发的故障占比也在逐年上升[4-6]。有学者对某系统近10 a来的GIS设备故障情况进行了统计,发现2010~2019年设备故障年平均增长率为17.5%,共发生故障跳闸84次。其中,异物放电占比最高为50.0%,主要原因为罐体内存在金属异物或者杂质引起放电;绝缘件缺陷(盆式绝缘子、绝缘拉杆和支撑绝缘子)占比次之,为23.8%;装配及安装工艺不良占比为13.1%[7-8]。
GIS设备内部异物是指混入设备产品里的除GIS内部材质及部件以外的物质。主要原因是在组合电器GIS产品的设备制造过程、厂内装配过程、运输过程和现场安装过程中内部异物清理不到位[9-12],在GIS设备投入运行之后,异物在机械振动及电场作用下逐渐暴露出来而导致GIS内部闪络、绝缘击穿等故障[13-15]。在GIS设备中,常见的异物包括内部安装过程遗留物品、金属碎屑、橡胶粒子、外部塑料、纸屑和环境灰尘、粉末等。GIS设备安装及检修阶段的异物识别方法往往仅依赖于人工肉眼判断,对于腔体内存在一些细小微粒或与罐体底部颜色接近的颗粒,在可见光源下仅靠人工经验判断难以发现异物。因此,本文主要研究了GIS设备内部异物识别方法,对比不同方法的优缺点,设计了基于双光源补光的异物识别算法,并搭载在GIS设备内部检查机器人上实现了应用,解决了GIS设备内部异物难以识别发现的问题。
1 GIS设备内部异物识别方法
异物识别技术是采用大量样本训练得到良好的网络模型,依赖实时数据得到预测的结果。也有一些常规的检测方法例如显著性检测等,而识别技术的准确度极大依赖于原始样本数据的有效性。目前各行业研究的异物识别的方法多种多样,但由于断路器、隔离开关等GIS设备腔体中的异物多是毫米级别,而且腔体中内壁光滑容易产生强反射,再加上异物的形状、种类及材料不定,实现GIS设备内部异物识别较为困难。为此,本文针对不同类型的波对于GIS腔体中异物成像效果的影响开展研究,比对声波、超声波及电磁波对GIS腔体内部异物识别的特点,以达到获取良好的GIS腔体内部异物成像效果图片,并显著提升GIS内部异物识别效果的目的[16-19]。通常,按照异物识别技术波的类型进行分类,對于主要检测方法分述如下。
1.1 超声波法检测异物
超声波检测主要是基于超声波在被检测工件中的传播特性,对反射、投射和散射波进行分析,从而确定被检测工件的特性。本文设计了超声波异物检测模型,利用单束超声波观察是否对细小的异物形成反射,测量其对不同大小异物的检测精度。超声波模块检测原理如图1所示。
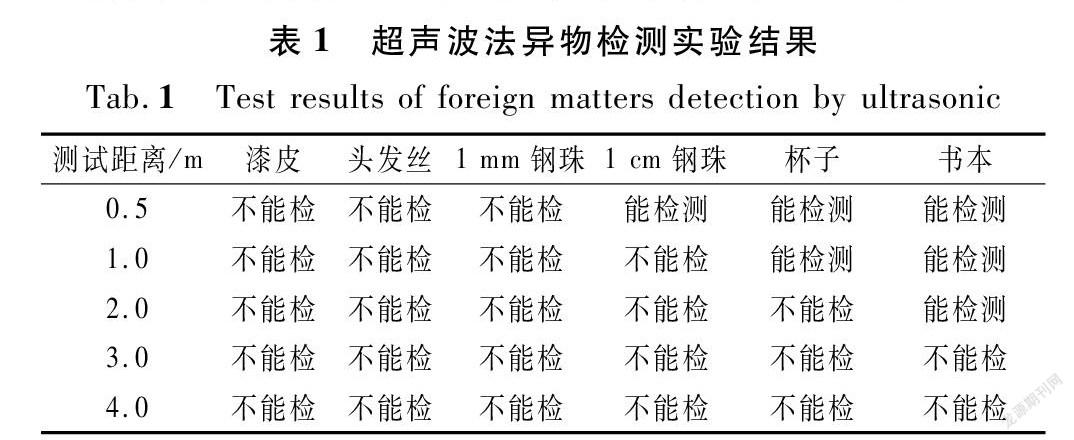
实验室设置了不同类型的异物,分别为2 mm×3 mm的漆皮、头发丝以及直径1~10 mm的钢珠、10 cm×5 cm杯子及书本等。不断调整超声波检测模块与异物间的距离,从而得到实验结果,如表1所列。
通过对实验检测的数据展开分析,发现对于漆皮、头发丝及毫米级的钢珠异物,由于表面积较小,异物不能有效地反射超声波模块发出来的超声波,单束超声波的精度不满足要求,无法形成有效的图像。通过对实验数据进行分析,发现要形成反射回来的图像,异物横截面的面积至少在16 cm2左右。可见超声波法检测不符合现场GIS异物识别要求。
1.2 电磁波法异物检测研究
电磁波法针对GIS腔体内部小型异物的检测,同样是利用单束电磁波对小异物的反射信号来检测,该项目采用TFmini激光雷达对其进行测试验证。TFmini激光雷达基于飞行时间(Time of flight,TOF)原理,采用850 nm红外光源,配合独特的光学、电学设计,实现稳定、精确、高灵敏度和高速的距离测量功能。与超声波成像测距相似,TFmini雷达检测物体受到物体的反射表面积的影响[20]。TFmini雷达通过发射透镜发射红外激光,经过物体表面的反射,由接收透镜接收激光,通过反射时间、激光波长来计算距离。如果物体表面积小,激光很难反射回透镜,则物体就很难被检测到。通过搭建与超声波检测相似的平台,书本、杯子不变,选择1 cm大小的钢珠及塑料碎屑,调整测试距离以对不同类型的异物进行检测,结果如表2所列。
实验结果表明:书本、茶杯的反射面积足够大,能够很好地将激光反射回来,雷达就能检测出其具体位置;钢珠、塑料屑反射表面积较小,激光很难反射回来或者反射回来的激光不能由透镜接收。电磁波检测物体对物体的表面积要求很高,而GIS设备腔体中的异物都为微型异物,通过电磁波法很难对其进行检测。
1.3 光学法异物检测
(1) 光学敏感法。
当某种常温物质经特定波长入射光(通常是紫外线或X射线)照射,吸收光能后进入激发态,具有这种性质的出射光就被称之为荧光。另外有一些物质在入射光撤去后仍能较长时间发光,这种现象称为余辉[21-22],常见的例子是物质吸收紫外光,发出可见波段荧光。在GIS设备腔体内,通过带电检测解体发现的主要内部异物种类如图2所示;利用内部异物光学敏感异物荧光效应,使得部分异物发出异于背景的颜色,获得的图片中异物亮度高于背景,容易区分,从而检测出异物[23],如图3所示。这种检测方法是利用异物对特定光线的敏感性,所以它也有一定的局限性,对荧光不敏感的异物则无法检测。
(2) 光影法。
光影法是借助于不同物体在光源的照射下,受照射角度作用,会在设备内部异物的背光面形成大小不一的光影,通过捕捉光影来判断异物的情况[24-26]。由于物体微小,且当光源照射在物体之上时,物体会反射光源,但是微小物体反射的光源面积较小,与背景的反射光区别不大,难以区分异物与背景。当光源水平照射物体时,在物体背面将会形成一个阴影,此时如果图像采集装置垂直向下拍摄物体,就能够看见阴影以及物体的部分轮廓,由此便能够拍摄清楚异物的位置,如图4所示。
当白光倾角30°左右径直照射时,可以形成良好的阴影,这样有助于检测;同时,镜头越靠近物体,微小物体拍的就越清楚。紫外光拍摄时,有部分物体会发出荧光现象,这些物体分别是纸屑、泡沫板碎屑、白色塑料扎带、热熔胶。在检测过程中,需要保证光源与相机有一定的夹角,同时也需要保持光照均匀,而且覆盖面足够。所以,本文研究利用了光学敏感法与光影法互相结合方式开展GIS内部异物识别研究,采用了LED白光+紫外光的补光方式;同时,也采用了长焦距镜头以获得良好的异物与背景分开的图像,并利用图像识别算法来实现设备内部异物识别。
2 GIS异物识别方法研究
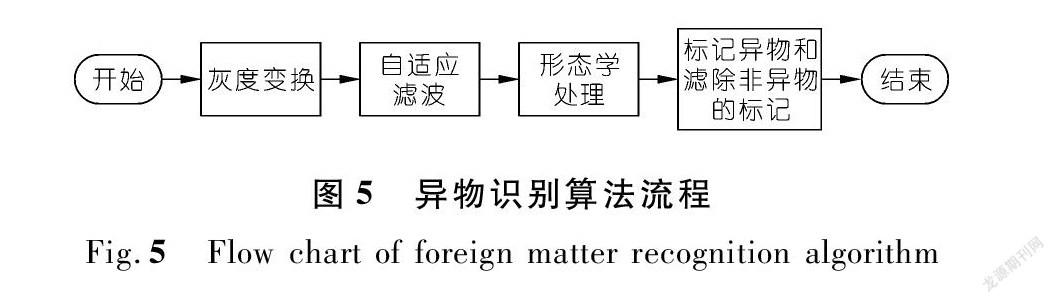
为验证采用LED白光+紫外光的补光方式下GIS设备内部异物的有效性,本文在离线条件下捕捉异物圖像以开展异物识别算法研究。采用C++语言作为检测算法的语言,其优点是处理图像的速度快,而且易于移植使用,便于与进一步搭载图像的装置进行集成;其图像处理采用开源的OpenCV库函数,该库容易获得资源且有广泛的开源代码可供使用。OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows和Mac OS操作系统上。它是轻量级而且高效的,由一系列 C 函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的通用算法。异物识别算法流程如图5所示。
2.1 基于YOLO算法异物特征提取
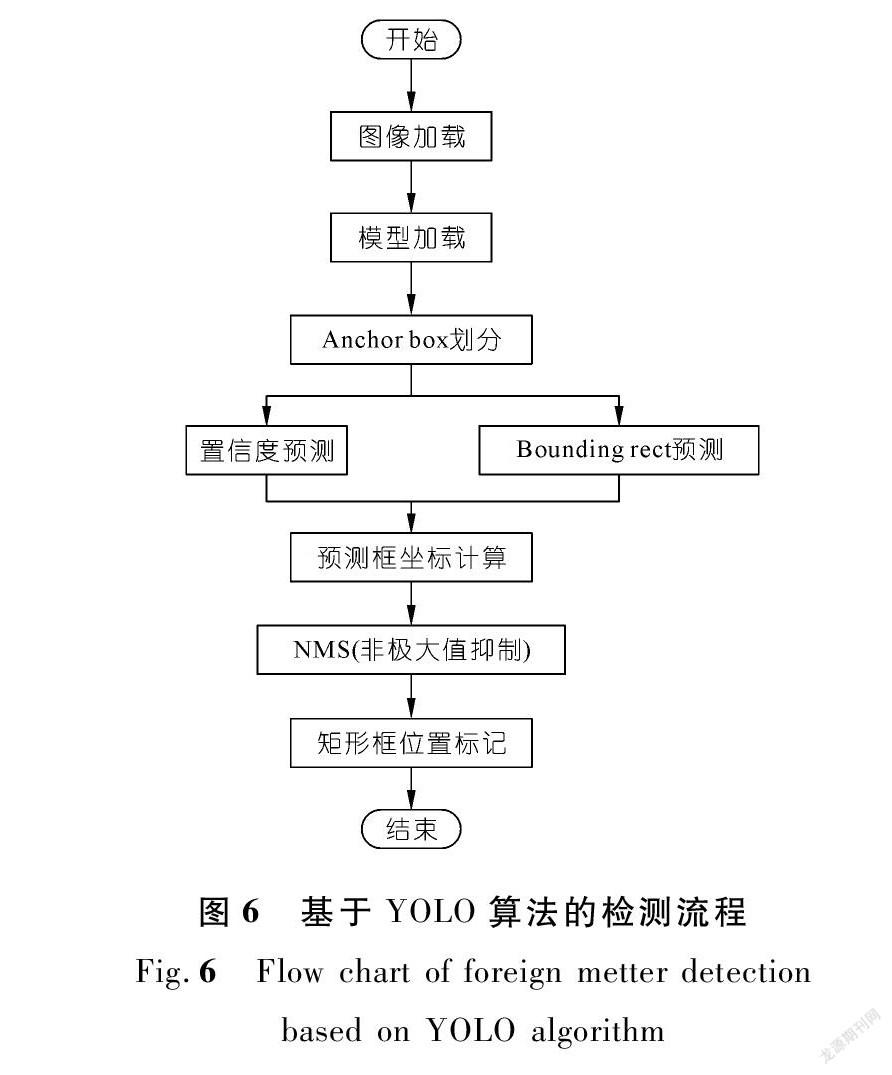
YOLO算法对提取特征进行了上采样、尺度拼接等操作,最后得到3个尺度的输出特征图,分别为13×13,26×26,52×52,每个尺度的特征图负责检测大小不同的物体,并进行异物目标预测。最终通过非极大值抑制方法筛选出最佳预测目标并输出目标在图像中的位置。图6为基于YOLO算法的检测流程图。
针对存在的腔体外部机器人检测环境视野偏大、机器人检测环境比较单一带来的问题,在设计训练模型时主要考虑了基于腔体外部机器人的模型训练,主要有以下2种改变:
(1) 修改网络结构中的Anchor等其他相关参数,使模型对于小目标的检测效果更加友好;
(2) 增加不同环境相关图片到整体训练样本中,增强模型的泛化能力。
经过以上的改进,算法检测能力得到了明显增强。经实际腔体环境测试,基于YOLO的目标检测算法在机器人部署上运行良好,相比传统的机器视觉检测算法,检测准确率有较大提升。
2.2 自适应滤波
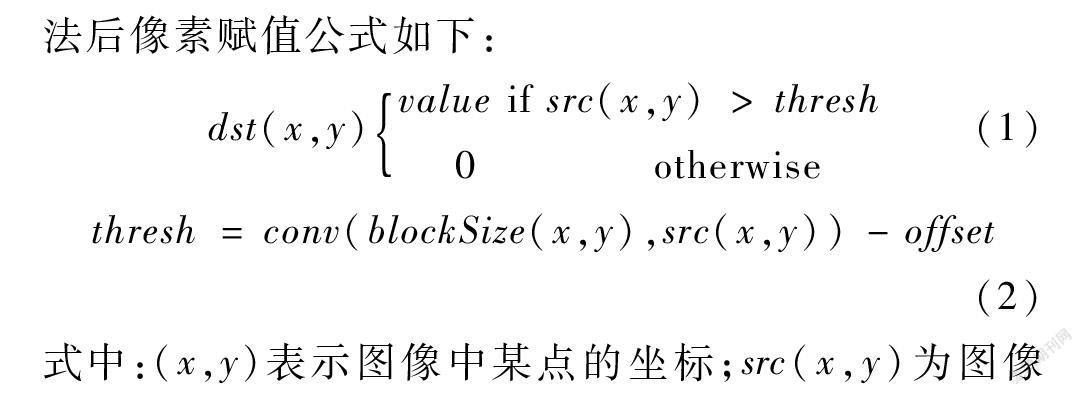
对于通过图像采集装置得到的腔体内异物图像,需要首先进行图像阈值化。阈值化的一般目的是从灰度图像中区分目标区域和背景区域,然而仅仅通过设定固定阈值很难达到理想的分割效果。在实际应用中,本文通过某个像素的邻域以某种方法确定这个像素具有的阈值,进而保证图像中各个像素的阈值会随着周期围邻域块的变化而变化。在灰度图像中,灰度值变化明显的区域往往是物体的轮廓,所以将图像分成一小块一小块地去计算阈值往往会较好得出图像的轮廓,而固定阈值的方法则无法达到良好的效果。异物识别算法选取固定的区域大小,求取均值,以减小偏移量为目标作为阈值的滤波方法,其中自适应滤波算法后像素赋值公式如下:
dst(x,y)value if src(x,y)>thresh0otherwise(1)
thresh=conv(blockSize(x,y),src(x,y))-offset(2)
式中:(x,y)表示图像中某点的坐标;src(x,y)为图像中某点的像素值;dst(x,y)为自适应滤波后图像中某点的像素值;value值可以根据实际情况进行设置;blockSize(x,y)为一个高斯核函数,按照高斯函数进行离散取值;conv表示对离散取值与实际像素值做卷积;offset表示偏移量,在不同的腔体中检测,开始进行初始化,默认值offset取60;thresh为根据实际图像状态计算的动态阈值。
2.3 形态学处理
形态学处理是一个数学运算。处理类型相当于运算函数,表示如何对图像数据进行变换,结构元素好比函数自变量的取值范围,在进行形态学处理时,控制该点像素点的运算,需要取出周围的点进行运算。由于异物比较小,在寻找异物轮廓的时候容易造成整个轮廓分成无数的小轮廓,给后面的定位造成不准和干扰。采取形态学的闭操作可以填充一些小空洞,减少后续寻找轮廓的干扰。
形态学处理的过程主要包括如下3个步骤。
(1) 形态学膨胀。在一个滑动的窗口内,求取窗口中所有点最大的值,并且将这个最大的值给到滑动窗口的锚点处。
(2) 形态学腐蚀。在一个滑动的窗口内,求取窗口中所有点最小的值,并且将这最小的值给到滑动窗口的锚点处。
(3) 形态学闭操作。通过形态学闭操作,在形态学膨胀操作之后再进行形态学的腐蚀操作,可以滤除背景中细小的杂波点,同时能够在不改变面积的情况下使得目标物的外轮廓更加凸显出来。
2.4 异物动态标记
为了通过结果标记准确地找出异物的位置,需要定住外部的轮廓和轮廓的中心位置,然后用矩形框拟合。本文使用轮廓查找函数,先定位外部轮廓的点,然后使用旋转矩形返回每一个矩形的中心和边界的4个点,使其轮廓被旋转矩形拟合。在光影法中,由于光影与实际异物的距离存在差异,采用根据面积和周长进行设定系数动态调整的策略,对于面积和周长大的异物轮廓进行标记框的删除,当标记有异物的时候用视频记录保存,等待检测结束后人工查看。
3 机器人GIS内部异物识别技术
由于GIS腔体两手孔部位距离较远,单个筒体长度可达10 m,筒体内部异物状态难以通过人工进行检查[27]。本文设计了GIS设备内部检查机器人,并利用机器人本体搭载的可见光及紫外光源在双光源补光条件下捕捉图像进行异物识别,实现GIS设备内部异物的智能识别,机器人本体结构如图7所示。
GIS腔体检查机器人顶盖和底盘内部主要布置有2块主控电路板、1个主控电路板安装架、4个驱动电机、2个摄像头安装架、2个前置摄像头、内置有4枚可重复充放电的锂电池、4块微型的电机驱动板、1块电源板、1个电源板安装架、1个尾部航插接头、1个电源开关等。补光灯与前置相机并排布置于机器人底部,补光灯板可提供两种光源:一种是高亮白光,另一种是紫外光。白灯光用于环境昏暗的情况下对GIS腔体内部进行补光,便于机器人的正常行进与工作;紫灯光用于在GIS腔体内给各种障碍或异物打光,便于进行异物荧光反应下的识别。
机器人系统在GIS设备腔体内部行走检查内部情况时,前端视频设备获取腔体内部信息和视频图像信息,并设置好采集窗口和视频参数,然后开始捕获一帧的视频图像,并将视频图像推送到本地的8080端口上,上位机获取后进行处理及应用。当机器人系统对GIS设备垂直段进行检测时,利用机器人的模块化设计,可以将柔性臂搭载的图像采集模块与机器人本体分离,借助本体的光源进行腔体内照射,对柔性臂搭载的前端视频设备获取的信息进行处理。采集传输流程如图8所示。
机器人在GIS设备腔体内部检查过程中,对采集到的图像进行视觉检测,检测的内容包括管道内部异物、异色等,并将检测到的图像进行放大显示、存储到本地磁盘。如图8所示,通过小样本特征提取与训练模型构建模块,实现在异物小样本的条件下提取异物的特征,并根据提取到的特征信息构建训练模型,以此来提高监控系统提取异物特征的速度和准确性。具体包括对异物整体、局部特征的提取,对不同类型、不同大小的异物进行特征提取和分类,并根据这些特征信息构建适用于GIS设备腔体内部异物检测的训练模型。随着采集到的样本数量的增加,训练模型越趋于完善,检测准确度与效率也逐渐提高。GIS内部异物识别过程如图9所示。
4 异物识别技术应用
将异物识别技术搭载于GIS设备内部检查机器人,并在330 kV GIS分支母线模拟罐体内部进行试验,试验情况如图10所示。
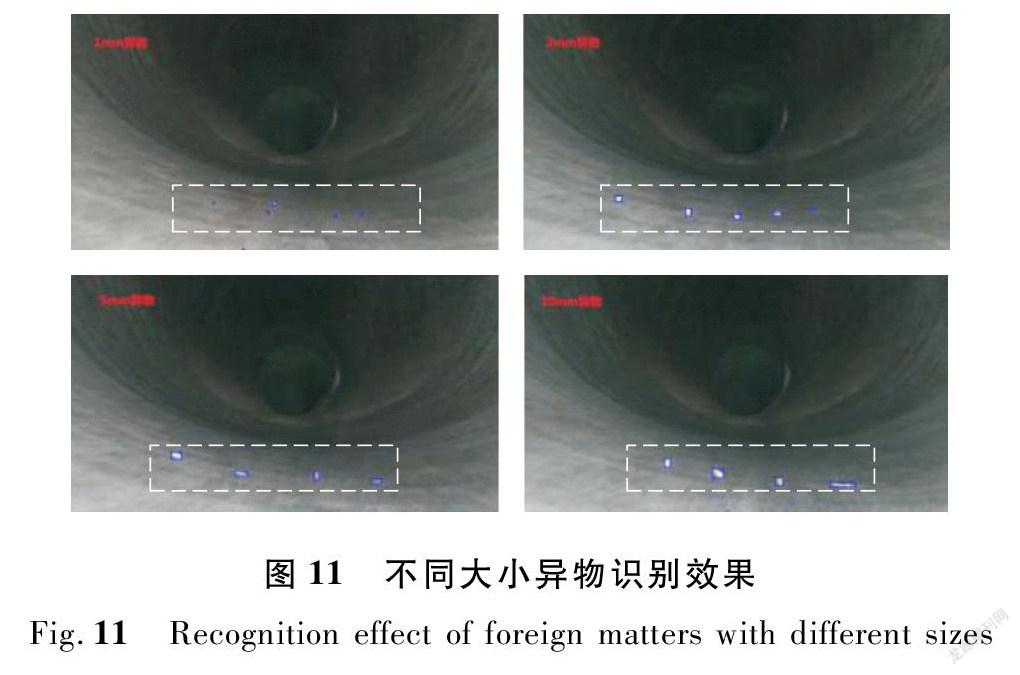
为了进一步验证双光源补光的异物识别效果,分别使用不同类型不同尺寸的异物进行检测。在GIS试验腔体内部分别预置不同大小的异物颗粒,每种异物的摆放方向及位置均随机放置。在识别过程中,发现机器人光源的角度对识别图像影响较大,需要保证光源与相机有一定夹角,同时保持光照均匀,且覆盖面足够。当白光倾角30°左右径直照射时,可以形成良好的阴影,有助于检测,同时镜头越靠近物体,微小物体拍得越清楚。紫外光拍摄时,有部分物体发出荧光,这些物体分别是纸屑、泡沫板碎屑、白色塑料扎带、热熔胶。检测过程表明采用LED白光+紫外光的方式,可以获得良好的异物与背景分开的图像,易于检测。对异物的识别效果如图11所示。
由上述识别图像可以看出:对1 mm以上的异物颗粒,可以通过双光源异物识别算法进行有效识别,并且随着异物颗粒的增大,其识别的光斑同步增大。由标记的结果可以看出,识别框中尺寸为20 mm的异物明显大于5 mm和2 mm的异物,双光源识别算法对异物的大小具有一定的鲁棒性,对细小的异物有显著的检测效果。
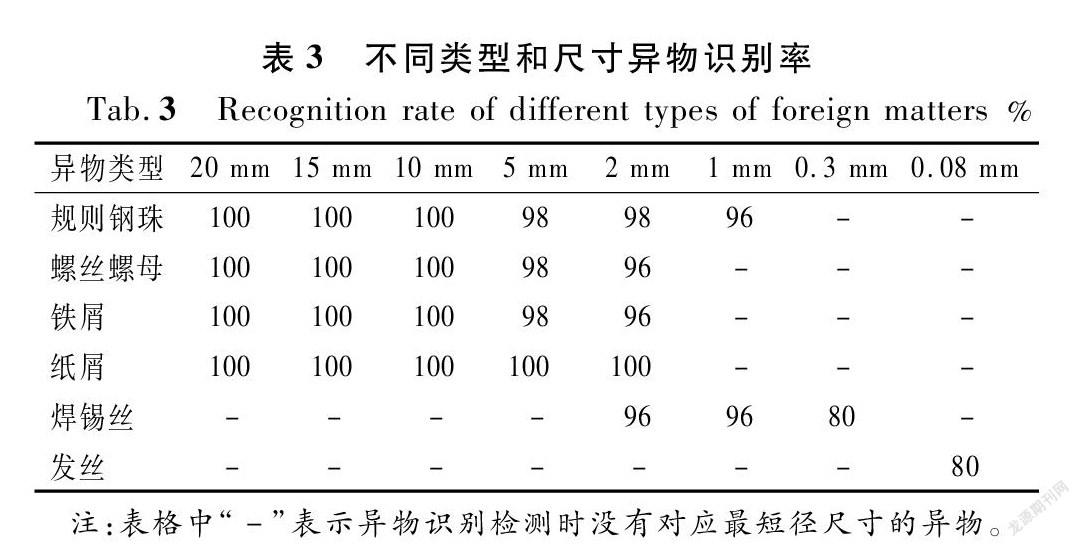
分别对规则钢珠、螺丝螺母、铁屑、纸屑、焊锡丝、发丝等不同类型的异物进行了识别,每种类型异物采集试验样本50组,异物识别率如表3所列。经过多次实验,GIS设备内部智能检查机器人在18帧/s的频率下,异物识别算法能检测出毫米级的异物,毫米级异物识别准确率在95%以上,亚毫米级异物识别准确率也可达80%。因此,本文GIS异物检查机器人的异物识别技术可以满足GIS设备腔体中异物检测的要求。
本文采用方形异物、长条形异物作为识别对象,分别对本文识别方法与超声波法、电磁波法异物识别情况进行比对。检测距离结合小车的视角和GIS腔体的实际情况持续调整,在对距离的持续调整过程中,如果能识别图中的异物则为“能”,否则为“否”,比对结果如表4所列。由表4中识别方法的比对结果可以看出:超声波法及电磁波法对于较小的异物难以发挥作用,双光源法能够识别出毫米级的异物,对小于1 mm的异物识别效果与异物类型密切关联。
5 结 论
本文针对GIS设备内部异物难以检查的问题,分析了不同类型异物识别方法在GIS设备内部异物识别的准确性。设计了GIS设备内部异物识别算法,研究了将光学敏感法和光影法相结合的识别方法,并搭载在GIS设备内部检查机器人上,实现了GIS设备罐体异物识别的实际应用。
在机器人自动行进过程中,以18帧/s的频率采集GIS设备内部的图像,并将图像上传至上位机识别。采用双光源补光的异物识别方法,可准确地识别出GIS腔体场景中的毫米级异物,準确率可达95%以上,
能夠在GIS设备关键点见证、现场安装、设备检修等环节推广应用。
参考文献:
[1] 刘洪正.高压组合电器[M].北京:中国电力出版社,2014.
[2] 马飞越,刘威峰,李奇超,等.GIS交流耐压试验中超声检测自由颗粒缺陷的分析[J].人民长江,2018,49(6):92-96.
[3] 申健.GIS金属异物的工艺过程控制[J].河南科技,2018,12(12):46-48.
[4] 李军浩,韩旭涛,刘泽辉,等.电气设备局部放电检测技术述评[J].高电压技术,2015,41(8):2583-2601.
[5] 许渊,刘卫东,陈维江,等.交流 GIS 绝缘子表面亚毫米级金属颗粒的运动和局部放电特性[J].中国电机工程学报,2019(14):4315-4325.
[6] 卢斌先,冯启琨,李晓,等.考虑金属异物存在时220 kV紧凑型GIS内电场分布精确分析[J].高电压技术,2018,44(11):3493-3501.
[7] 许渊,刘卫东,陈维江,等.运行工况下交流 GIS 绝缘子表面微金属颗粒运动诱发沿面闪络的研究[J].电网技术,2020,44(4):1596-1602.
[8] 李继胜,赵学风,杨景刚,等.GIS典型缺陷局部放电测量与分析[J].高电压技术,2009,35(10):2440-2445.
[9] 李娟,李明,金子惠,等.GIS设备局部放电缺陷诊断分析[J].高压电器,2014(10):85-90.
[10] 李秀广,韩四满,万华,等.宁夏电网GIS设备缺陷分析及预防措施[J].电气技术,2015(3):107-110.
[11] 何宁辉,朱洪波,周秀,等.GIS内部缺陷检测及诊断分析技术研究[J].电测与仪表,2019,56(24):86-91.
[12] 张凯,胡春江,孙亚明,等.一起750kV变电站GIS支柱绝缘子故障分析[J].电测与仪表,2015,52(1):115-118.
[13] 李通,薛峰.UHF局放检测技术在GIS故障诊断中应用与分析[J].供用电,2018,35(12):80-88.
[14] 缪金,王艳华.GIS组合电器典型故障分类和全周期维护策略研究[J].陕西电力,2017,45(2):78-81.
[15] 夏天,吴彤,叶齐政,等.悬浮颗粒局部放电综合作用机制的研究[J].广东电力,2019,32(8):101-108.
[16] 赵永生,徐海青,吴立刚,等.基于霍夫直线变换的输电线路异物识别应用研究[J].数字技术与应用,2017,3(3):127-130.
[17] 万书亭,赵晓迪,肖珊珊,等.基于BP神经网络的GIS缺陷图像识别系统的研究[J].电力科学与工程,2017,33(11):73-78.
[18] 李宁,郑仟,谢贵文,等.基于无人机图像识别技术的输电线路缺陷检测[J].电子设计工程,2019,27(10):102-106.
[19] 孙志锋,孙志林.跳跃颗粒的计算机图像识别[J].模式识别与人工智能,2000,13(3):357-360.
[20] 李南忘.基于数据挖掘方法通过简约参数建立水质异常检测及污染物识别系统的研究[D].上海:华东师范大学,2016.
[21] 韩仲志,刘杰,刘康炜,等.紫外/可见光下海洋溢油油种光谱识别方法[J].光学技术,2016,42(4):337-341.
[22] 李拓.目标紫外光谱散射特性研究[D].西安:西安电子科技大学,2012.
[23] 韩仲志,万剑华,李永平,等.紫外诱导高光谱成像的海洋溢油及乳化探测方法[J].光学学报,2016,36(1):2-6.
[24] 刘薇,苏俊源,尚秋峰.基于彩色区域识别快速报警指针识别算法[J].电测与仪表,2014,51(20):25-30.
[25] 王建元,郭威,刘洋,等.基于图像识别的移动机器人自动完成充电[J].电测与仪表,2017,54(10):103-107.
[26] 卢荣胜,吴昂,张腾达,等.自动光学(视觉)检测技术及其在缺陷检测中的应用综述[J].光学学报,2018,38(8):2-28.
[27] 马飞越,游洪,佃松宜,等.一种用于气体绝缘开关设备异物清扫与检测的机器人系统[J].计算机科学,2017,44(增2):592-595.
(编辑:赵秋云)
Research on recognition technology of foreign matters in GIS equipment of hydropower station
MA Feiyue1,NIU Bo1,DIAN Songyi2,ZHAO Tao2,NI Hui1,CHEN Lei1
(1.Electric Power Research Institute of State Grid Ningxia Electric Power Co.,Ltd.,Yinchuan 750002,China; 2.College of Electrical Engineering,Sichuan University,Chengdu 610064,China)
Abstract:
GIS equipment is the key equipment for power transmission in hydropower stations.The insulation breakdown caused by internal foreign matters is the most common fault in GIS equipment,which directly affects the benefit of hydropower station.Due to the long barrel of GIS equipment,it is difficult to judge the internal millimeter-level foreign matters by experiences during the equipment installation and maintenance.Therefore,in order to check and identify the foreign matters in GIS pipelines more effectively,we analyzed the effectiveness of different types of identification methods such as ultrasonic wave,electromagnetic and optics wave on the internal foreign matters in GIS equipment.Then we proposed a method of foreign matters recognition combining optical sensitive method and light shadow method,designed a algorithm of foreign matters recognition based on dual light source filling light,and equipped with foreign matters detection robot in GIS equipment to realize the application,which solved the problem that it is difficult to identify and find the foreign matters in GIS equipment.The results showed that the foreign matters recognition method based on dual light source filling light can effectively and accurately identified the millimeter-level foreign matters in the GIS cavity scene,and the accuracy rate can reach more than 95%.
Key words:
GIS equipment;foreign matters recognition;light shadow method;robot;hydropower station