医用内窥镜装置的研究进展
2021-01-16鲍玉冬齐东博魏雯王亚君赵彦玲
鲍玉冬 齐东博 魏雯 王亚君 赵彦玲







摘要:医用内窥镜能够有效对患者体内病变器官进行诊断,在医用内窥镜介入诊疗过程中,诊疗结果主要依赖于其设计结构和成像原理,介入过程容易产生不适症状或影响诊疗效果,若能改进传统医用内窥镜结构,提高成像技术,将对医用内窥镜介入诊疗提供重要帮助。本文在概述了医用内窥镜介入工作原理的基础上,通过阐述现阶段医用内窥镜结构和成像方面的新动态和技术,对医用内窥镜装置的研究现状进行综述,分析总结了目前医用内窥镜所存在的主要问题,并对内窥镜装置的发展前景进行了展望。
关键词:医用内窥镜;机械结构;成像方式;专利技术;微创手术
DOI:10.15938/j.jhust.2021.05.004
中图分类号:TH79;R318 文献标志码:A 文章编号:1007-2683(2021)05-0025-09
0 引言
随着世界老龄化趋势的不断加深和日益严重的环境问题,令内窥镜的需求量不断增加。内窥镜技术由于其诊疗的高准确性,创伤小,不易感染,手术后恢复快,几乎没有疤痕等优点而受到了医学界的广泛关注,成为了全球医疗器械行业增长最快的产品之一[1-5]。近年来,尽管医生通过常规医用内窥镜可以直接观察到人体内脏器官组织形态和体内病变情况,但是医生在进行内窥镜诊疗时,手术质量仍受到医用内窥镜的结构和成像技术的限制[6-7],在实际介入手术操作过程中可能会出现以下诸多不利的情况:①由于医用内窥镜的导管要从患者孔道介人到患者体内,导管和患者孔道组织会不可避免的存在接触摩擦[8],如果导管受到的阻力和扭转力不能准确反馈给医生,则导致对患者造成不必要的操作性创伤。②内窥镜介入时,由于患者孔道的空间狭窄,其在患者孔道内运动受限,因医生操纵内窥镜时,手腕、肩膀等身体关节的运动都会造成内窥镜导管发生位置偏差及抖动,影响成像效果和手术精度。③目前镜检的可操作性对医生技术要求较高,因此临床医生一般都要进行培训[9],且学习周期长,难度大,导致镜检的操作医师数量相比于患者数量存在明显的供需断层。④在内窥镜检查过程中,由于患者的應激性反应,会对医用内窥镜内部纤维束造成损害,影响图像质量,提高手术成本。
通过上述分析,目前医用内窥镜的设计和使用方面还存在提升的空间,还需要进一步集成化、智能化,通过改进医用内窥镜的机械结构和优化成像技术,达到内窥镜能够在患者不同腔道内运动并获取高清病灶图像的目的。本文通过对医用内窥镜机械结构和成像技术两个方面进行阐述,结合医用内窥镜的关键技术,分析了医用内窥镜新型结构和成像技术对医生、患者及整个探测过程的影响,不仅可以促进医用内窥镜诊疗方法的推广,还可以为医用内窥镜的创新发展提供思路。
1 内窥镜组成方式与工作原理
医用内窥镜主要包括供电模块、采集模块、光源模块以及处理模块等部分,具体组成如图1所示。
医用内窥镜系统供电模块主要采用TPS70302PWP等电源管理芯片,可以排除不同电路间的干扰[10],同时为医用内窥镜系统各个模块进行供电;医用内窥镜采集模块主要分为两个部分,分别是前端转接头和图像传感器,前端转换头的作用是将各种软、硬式医用内窥镜与主机进行连接,其内部包含一系列透镜组,以保证导管前端摄像头采集图片的完整性;图像传感器主要将采集到的光学信号转换成可以被处理的电信号,由于CCD传感器具有较高的分辨率和较小的尺寸,目前医用内窥镜主要采用CCD传感器作为图像传感器[11];光源主要通过医用内窥镜内部光纤进行导光,为患者病变部提供照明,由于LED灯光具有体积小、发热量低等特点,目前医用内窥镜均采用LED作为光源[12];处理模块属于医用内窥镜最重要的模块,通过可编程逻辑门阵列等处理芯片来提高医用内窥镜的集成度,从而提升成像效果[13]。
为获取患者内部器官的病变信息,提升治疗效率,医生通常采用病史分析、物理检查和病理检查等方式对组织病变进行诊断[14]。其中,从患者体内观察并取出病变组织进行分析,是医用内窥镜诊疗过程中常用的诊断手法。以支气管镜为例,被治疗的患者处于镇静或麻醉状态,由专业医生左手持医用内窥镜操作部,右手将医用内窥镜插入部的导管通过患者孔道置入病变处,导管前端设有光源和镜头,用来摄取气管内影像,将影像传输给终端计算机,通过终端计算机显示器来实时显示患者体内图像;医生通过控制导管的旋捻、插入和取出等动作改变导管在患者体内的姿态,从而减少导管前端、管壁与气管组织的接触和摩擦,通过操作部弯曲控制扭控制导管前端和弯曲部弯曲从而适应气管路径的曲率变化和分叉处路径的选择;整个探查过程医生可以通过显示器观察组织的病变,当医用内窥镜镜头前端抵达病灶处进行相应治疗时,可将吸引管、穿刺针、活检钳等经操作部开口沿着导管从导管前端开孔处伸出,根据患者内部组织病理的不同,医生通过活检钳钳取、网篮扩张、穿刺针穿刺等操作进行支气管介入诊疗。医用内窥镜工作原理如图2所示。
2 医用内窥镜装置关键问题分析与研究进展
目前,医用内窥镜已经应用于医院的各个科室,从简单的内部器官检查到介入治疗,医用内窥镜均有涉及,内窥镜微创技术已经成为消化、呼吸、泌尿、耳鼻喉科等系统疾病诊疗不可或缺的一项关键技术[15-19]。然而,在医用内窥镜使用过程中仍然存在一些问题,比如调整角度较小,镜身较脆弱,成像效果差,结构复杂,照射光源具有缺陷等,制约了医用内窥镜的进一步发展。技术人员对上述问题进行研究分析,对医用内窥镜的机械结构及成像技术两方面进行了改进。
2.1 医用内窥镜机械结构
医用内窥镜机械结构的改进主要有以下几点:对传统内窥镜操作部进行改进;对内窥镜插入部导管进行改进;对内窥镜整体结构进行改进。
1)对医用内窥镜操作部改进。
由于医生需要将内窥镜通过患者器官孔道送入体内进行检查,在操作内窥镜进行导管弯曲时会出现角度调节顺畅度差等情况。2017年Ye Xianming等[20]为胶囊内镜的胶囊运动控制问题提出了一种转向装置,可用于全方位操纵绳系胶囊内窥镜的胶囊。该装置包括三个线性致动器、一个柔韧的细系绳和一个可伸缩的胶囊底座,如图3所示。该装置开设具有三个通道的软管,便于插入转向机构和照明光纤;在转向机构通道中,医生可以通过手柄对致动器进行控制,根据实际需要,改变钢丝绳的长度和速度。当需要对导管的角度进行固定时,控制主软管的弯曲度可实现360°内任意角度的锁定,减少了医用内窥镜内部结构出现故障的概率。
传统医用内窥镜需要医生通过双手来控制旋捻和进给,为了减少医生误操作对患者造成的伤害。2018年Iwasa T等[21]为了简化内窥镜的操作,开发了一种可以单手控制的机器人辅助柔性内窥镜,如图4所示。该内窥镜系统由内窥镜持有部、机动臂和主控制器组成,导管通过内窥镜持有部主轴旋转而旋转,角度刻度盘与支架内的两个电动轮相啮合,轴向插入-缩回是通过机动臂的前后运动来完成。医生可以通过对主控制器手柄的拨动、旋转及伸缩来控制镜头的运动。
2)对医用内窥镜插入部导管改进。
2016年金仁俊等[22]发明了一种具有注射功能的医用内窥镜,如图5所示。在传统医用内窥镜的基础上添加了将注射针头插入到患处的注射器驱动部和药物注射部,利用液压或电磁力的压力使活塞进行运动,将药物送至患处,解决了传统医用内窥镜手术中由于注射器药剂室空间较大,药物注射到患者患处方面较为困难的问题,显著提高了对患处药物注射的准确性与便利性。
传统医用内窥镜导管主要是以蛇骨结构为中心进行研发,但是牵引弯曲部运动的钢丝等结构容易发生断裂。2021年Liu Jianbin等[23]开发了一种具有形状锁定功能的双弯曲液压内窥镜,用于胃筛查,如图6所示。该内窥镜使用空间弯曲射流执行器(SBFA)实现导管弯曲,围绕SBFA中心轴线均匀分布着三个平行腔室,腔室接出的3个水管分别连接到探头的3个接口上,探头内设有阀门,当水压在某一单独腔室内加大时,以硅胶为主要材料的SBFA在该腔室方向会发生延展而使执行器弯曲;当水压增大到一定值,水阀打开,水从探头侧面喷出,致使探头进行二次弯曲,加大了探测扫描面积。到达预设位置后,通过拉动镍钛诺丝,触发形状锁定机构使其处于刚性状态,锁定了装置的形状,以提高水射流弯曲运动的稳定性。
在对病人进行胃部状况检查时,针对于胃部使用的医用内窥镜缺少对其导管端部镜头的防护,导致内窥镜鏡头易受到胃酸腐蚀从而产生损坏,造成成像模糊和出现雾气等现象,针对于上述问题,2020年任萤[24]设计了一种应用在消化科的医用内窥镜,如图7所示。在导管端部设有防护罩,内部设有空腔,胃镜探头嵌人于空腔内,防护罩底端紧密粘接有密封圈。该内窥镜通过在胃镜上设置防护罩,从而实现对胃镜端部的内径探头进行防护以及去除雾气等效果,还可以通过该内窥镜上的撑口组件,实现撑开患者口腔的效果,减少了内窥镜进入患者孔道不顺畅的情况发生。3)对医用内窥镜整体结构改进。
在2021年,Ryu Geunwoong等[25]提出了一种新的内窥镜,其扫描体积小,可用于角度变化,如图8所示。该内窥镜主要由操纵杆及图像传感器组成。其中,经过图像传感器获得的图像信号可被输入到电机控制板上,通过电机控制板的逆运动学计算将图像信号转换成关节角度值,使每个轴都可以根据这些值进行定位,构成闭环反馈,能够精确控制转角的同时,还可以使内窥镜在小空间内获得足够的扫描角度。
为解决在内窥镜手术过程中,镜头起雾现象,2016年李雷等[26]设计了一种低温内窥镜血管采集装置,如图9所示。该医用内窥镜系统利用环形气囊,将短口套管有效固定在切口处,防止短口套管发生移动对血管造成破坏,从而来保护患部切口。通过该内窥镜血管采集系统中的低温电凝剪刀,可以保护患者血管免受高温灼烧所造成的伤害。该医用内窥镜装置提高了手术过程中血管的完好率,减少了手术创口,降低了患者感染概率,避免血管的隐形损伤,提高搭桥手术的成功率,减少了血管再次堵塞的风险。
传统医用内窥镜结构密封性较差,容易造成仪器损坏,2020年Axel Boese等[27]提出了一种新颖的设计,该设计采用了用于柔性内窥镜的旋转摄像头,如图10所示。其使用形状记忆线来控制摄像机的运动,使用柔性塑料活瓣接头进行紧密旋转,使用柔性印刷电路进行电子连接,如图10所示。其利用柔性内窥镜改善狭窄空腔的成像,增加了诊断的价值和病人的舒适度。
2018年Bresco T P等[28]发明了具有零度视场角的倾斜尖端内窥镜,如图11所示。该内窥镜在远侧端部设计为倾斜部分,使得患者病变处可以平行于内窥镜导管中心轴线,实现视角可视化,远端尖端处的倾斜部分方便窥镜插入患者体内,从而减少用于送入导管介入患者体内的力。该装置解决了由于普通医用内窥镜插入患者体内所引起的患者组织变形、创伤和疼痛,具有减少插入力、缩短患者的创伤、疼痛和恢复时间等优点。
2.2 医用内窥镜成像技术
对医用内窥镜成像技术的改进主要有以下几点:对传统内窥镜透镜进行改进;对传统内窥镜成像系统进行改进。
1)对医用内窥镜透镜改进。
目前双目立体视觉系统广泛应用于生活娱乐等方面,然而具备立体视觉系统的内窥镜尚在起步阶段,2019年王树新等[29]将立体视觉系统运用到医学设备上,提出了一种立体内窥镜装置,单个镜头端面结构示意图如图12所示。通过可调节的冷光源利用Y形光纤提供两路照明通道,从而降低了内窥镜诊疗手术中冷光源的数量,也为内窥镜诊疗过程中提供了足够的照明亮度,实现了介入手术下立体视觉效果,减少了成本。该发明实现了内窥镜与双路摄像组的快速拆卸和可靠连接,通过六自由度调整方式,有效的减少了双路镜头的偏差,具有易于消毒、便捷快速连接启动等优点。
传统的医用内窥镜摄像装置大多为自然光谱范围内成像,具备定量深度感知解剖特征的有效体积识别和高效3D导航的生物组织的内窥镜,对于各种目标疾病的光学诊断和微创手术至关重要。2020年Guo Changliang等[30]提出了使用GRIN透镜阵列的3D光场内窥镜成像模型,如图13所示,该模型通过保持GLA系统与临床内窥镜系统具有一致的空间度量,在保证结构紧凑的前提下,还能够最大限度地捕获3D成像所需的角度信息。同时,该模型还提出了一种结合波动光学模型和混合点扩散函数的计算策略,用于高分辨率体积重建,可为裸眼、高分辨率3D医学内窥镜检查提供支持。
2)对医用内窥镜成像系统改进。
传统医用内窥镜的光源主要采用LED光,光照强度受到光纤面积等条件限制,且在病变处的光照强度通常不足,2019年Basij Maryam等[川提出了一种微型相控阵超声和光声内窥镜成像系统,它能够为妇科疾病的表征提供结构、功能和分子数据,如图14所示。该系统探头由一个64元素的超声相控阵换能器和一个光纤传输系统组成,集成了超声和光声成像体系;这种内窥镜能够在临床相关深度提供高分辨率成像信息,可用于对宫颈管和周围子宫内膜组织进行成像。
2017年Jung Kweon Bae[32]开发一种基于智能手机的内窥镜系统,其主要包括便携式光源、中继镜头、定制适配器和安卓应用程序,如图巧所示。该系统可适用于3种不同类型的刚性或柔性内窥镜探头,通过应用程序捕获内窥镜图像。无线连接的头戴式显示器(HMD),可以将内窥镜图像叠加到真实世界的视图上,增加医生的可视感。该系统具有便携性和可操性,增加了其图像获取的准确性。
2016年张升进等[33]发明了一种具有转折分光单元的内窥镜成像系统,如图16所示。该医用内窥镜通过光学成像系统,将可见光与红外荧光进行分光,然后再进行合光,从而改变两种光的光程,保证了光成像焦面位置的一致性,并利用转折分光单元对可见光与红外荧光的离焦进行校正,医生无需对内窥镜进行调焦,可直接观测病灶处,提升了成像效果;通过采用不同厚度的平板玻璃,满足不同离焦量的可见光与近红外荧光光学系统。该医用内窥镜解决了传统内窥镜结构庞大且成像镜片多的缺点,对成像软件的运算要求低,提高了成像效率。
目前医用内窥镜采用定焦光学系统,内窥镜感光元件受到像素尺寸大小的限制,导致现有医用内窥镜成像分辨率无法进一步提升,2016年何超等[34]为提升传统内窥镜分辨率,为医生提供更加清晰的图片,发明了一种电子内窥镜,如图17所示。通过轴向调节装置可以调节成像透镜组与感光组件的间距,从而改进内窥镜的调焦功能,提升了该医用内窥镜在诊疗过程中的分辨率,即使面对微小的观察目标也能够进行放大观察,获取清晰的图像。
彭小健等[35]针对目前国内市场医用内窥镜探头被垄断的现象,研制出一种消化道超生内窥镜探头,如图18所示。其自主设计一种新型三轴对焦马达并结合高像素图像传感器,研制出具有极大景深范围且能实现多点对焦的光学摄像模组,使得医用内窥镜成像质量得到了极大的改善,对囊肿等病变具备很好的识别效果。
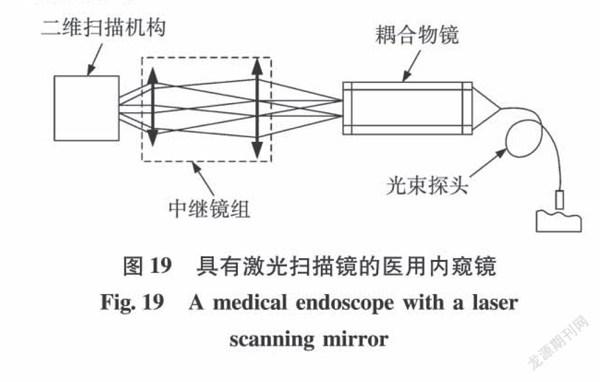
在内窥镜诊疗过程中,当导管弯曲部发生较小偏转时,会导致导管内部光学组件受到系统电路噪声的影响,造成像素抖动,从而对图像定位产生影响,为解决上述问题,2017年万勇等[36]提出了一种具有激光扫描镜的医用内窥镜,如图19所示。在保证入射和射出光束匹配情况下,对偏转光束进行压缩,提升内窥镜的扫描范围,提升了整体内窥镜系统的稳定性。
2017年詹涵箐等[37]设计了一种具有新型照明光学系统的内窥镜装置,如图20所示。该设计通过添加玻璃透镜,利用该透镜将光纤传递过来的冷光源进行全局反射,最后通过顶端透镜将光源进行折射。解决了传统照明光学仅能照射小范围区域的问题,实现了照明光的全反射,有效减少了照明透镜吸收的入射光线,使得返回光路的光线增强,并使照明光在尽可能全反射的同时引向顶端透镜,从而实现发出大角度的照明光,为医生提供更清楚的照明效果。
2018年Richard W C等[38]设计了一种荧光内窥镜视频系统具体成像过程,如图21所示。通过引导光照亮组织样本,收集组织产生的反射光或荧光,提高成像效果,照相机包括多个像素元件的高灵敏度彩色图像传感器,每个像素元件都具有阻止反射激光集成滤波器,图像处理器接收来自图像传感器的图像信号,组合来自第一组像素元素的图像信号以形成由荧光形成的第一图像,并且组合来自第二组像素元素的图像信号以形成由反射光形成的第二图像。极大的提高了传统医用内窥镜的成像效果,减少了医生漏诊情况发生。
3 医用内窥镜装置应用未来展望
随着医用内窥镜与超声技术和显微技术等一系列高新技术相结合,今后会发明出更先进的医用内窥镜。未来医用内窥镜的发展主要分为以下几个方面:
1)细微化,医用内窥镜导管末端大小直接影响患者创伤程度,通过将医用内窥镜操作部等结构进行重新设计,使其结构紧凑,从而降低因为患者末端腔道空间过小导致的触碰而带来的刺激和不适,加速康复。
2)介入诊断的半自动化,将计算机技术加持的图像处理手段揉合到医用内窥镜当中,开发计算机辅助半自动化诊断系统,减少对医生经验的依赖,提高诊疗的正确率。
3)高保真率,由于内窥镜的图像质量直接关乎整个手术的进程和走向,利用对医用内窥镜摄像头以及透镜的改进,解决分辨率影响患处成像的问题。
4)提升成像效果,为防止在诊断过程中导管运动所造成的伪影,通过对医用内窥镜的光学系统重新设计,从而提高内窥镜的图像成像速率。
5)发展多模态系统,利用模块化设计方案,将各种内窥镜通过不同转换器结合使用,提高检测和组织分类的准确性。
4 结论
医用内窥镜诊疗患者体内器官病变的效果,取决于医用内窥镜的结构和成像技术。本文综述了不同医用内窥镜装置的机械结构、成像技术及其应用。通过对医用内窥镜集成化,将整体结构设计更加紧凑;从内窥镜的操作部、插入部及整体结构三个方面进行了论述分析,通过对操作部的精准控制,完成插入部的灵活介入,增加自锁机构,允许医用内窥镜暂时固定位置并增加探查空间,医用内窥镜整体结构向集成式、灵活性方向发展,提升了医生操作效率,减少在诊疗过程中对患者的伤害。
对内窥镜透镜和成像系統进行创新,采用特殊透镜增加立体视觉效果,通过研制新型成像系统和传感技术提高成像分辨率及患者病灶处的成像效果,减少了医生对相关疾病的漏诊,有利于内窥镜诊疗的个性化。
隨着医用内窥镜机械结构的改进、成像技术的发展,相关技术和理论的不断完善,未来更加成熟的医用内窥镜装置必定会出现。
参考文献:
[1]陈庆.医用内窥镜关键技术的研究[J].中国医疗设备,2015,30(4):68.
[2]禹璐,程德文,周伟,等.硬性内窥镜光学系统的杂散光分析与抑制[J].光学精密工程,2014,22(3):525.
[3]徐宝腾,杨西斌,刘家林,等.高速扫描激光共聚焦显微内窥镜图像校正[J].光学精密工程,2020,28(1):60.
[4]张建勋,韩明慧,代煌.面向低分辨率单目内窥镜图像的三维多孔结构重建[J].光学精密工程,2020,28(9):2085.
[5]孙振环,徐腾腾,王德广.CT仿真内窥镜对支气管结石的诊断价值[J].实用医药杂志,2019,36(2):136.
[6]刘艳琴,靳庆芝,谢梅,等.全麻下支气管镜检术后不良反应观察及护理对策[J].中华肺部疾病杂志(电子版),2018,11(5):608.
[7]谭葆春,张鹏,李厚轩,等.内窥镜在牙周诊疗中的应用进展[J].中国实用口腔科杂志,2018,11(7):385.
[8]李凯.内窥镜绕管—食道黏膜组织界面摩擦行为研究[D].成都:西南交通大学,2018.
[9]黄丽萍,胡姣娣,徐婷,等.规范化操作对内窥镜室患者医院感染的影响[J].中华医院感染学杂志,2017,27(21):5030.
[10]周文光,王春飞,许新建,等.一种野战便携式内窥镜视频系统的研制[J].医疗卫生装备,2014,35(11):43.
[11]张渤晗,颛孙跃忠.内窥镜成像系统[J].电子测试,2020(2):119.
[12]王海娟,黄德球,丁罕,等.医用内窥镜冷光源显色性评价探讨[J].中国医疗器械信息,2017,23(10):4.
[13]尤若宁,许海树,张明旭,等.医用便携式内窥镜关键技术及未来发展方向[J].医疗卫生装备,2017,38(3):123.
[14]陈宇.基于肺穿刺手术导航的精度提升与路径规划研究[D].沈阳:东北大学,2014.
[15]任远,王凯.中耳炎鼓膜小穿孔耳内镜治疗的研究[J].中国耳鼻咽喉头颈外科,2020,27(3):141.
[16]江传燊,杨炳灿,李达周,等.软式内窥镜在腹部创伤中诊治作用的实验研究[J].东南国防医药,2020,22(4):351.
[17]李印玉,侯俊锋,张利,等.内窥镜在右侧双腔支气管导管插管中的临床应用[J].中国处方药,2016,14(05):118.
[18]唐林晨,陶国全,杨晓钟,等.肠息肉内窥镜下切除术后迟发性出血的相关因素分析[J].中国医学装备,2019,16(9):98.
[19]安迪.探究鼻内窥镜下低温等离子射频消融术对儿童箫症患者应激反应及通气功能的影响[J].当代医学,2020,26(21):137.
[20]YE X,CABIBIHAN J J,YOON W J.Design and Verification of aFlexible Device for Steering a Tethered Capsule Endoscope in theStomach[C]// 2017 14th International Conference on UbiquitousRobots and Ambient Intelligence(URAI).IEEE,2017:550.
[21]IWASA T,NAKADATE R,ONOGI S,et al.A New Robotic-as-sisted Flexible Endoscope with Single-hand Control:EndoscopicSubmucosal Dissection in the Ex Vivo Porcine Stomach[J].Surgi-cal Endoscopy,2018,32(7):3386.
[22]金仁俊,姜一模,李洪珍.具备注射功能的内窥镜:CN106031655A[P].2016.
[23]LIU J,YIN L,CHANDLER J H,et al.A Dual-bending Endo-scope with Shape-lockable Hydraulic Actuation and Water-jet Pro-pulsion for Gastrointestinal Tract Screening[J].The InternationalJournal of Medical Robotics and Computer Assisted Surgery,2020,17(1):1.
[24]任莹.一种便于使用的消化科胃镜:CN210277121U[P].2020.
[25]RYU G,KIM J,PARK C,et al.An Active Endoscope with SmallSweep Volume that Preserves Image Orientation for ArthroscopicSurgery[J].The International Journal of Medical Robotics andComputer Assisted Surgery,2021,17(1):1.
[26]李雷,谢茜.一种低温内窥镜血管采集装置及方法:CN105963013A[P].2016.
[27]BOESE A,ARENS C,FRIEBE M.Novel Flexible EndoscopeConcept with Swiveling Camera Tip[J].Current Directions in Bi-omedical Engineering,2020,6(3):288.
[28]BRESCO TP,DEGOLLADA BM,MATED PC,et al.Oblique TipEndoscope with Zero Degree Field Angle.EP2016710550[P].2018.
[29]王树新,高元倩.微创手术机器人立体内窥镜装置:CN106618449A[P].2017.
[30]GUO C,URNER T,JIA S.3D Light-field Endoscopic Imaging U-sing a GRIN Lens Array[J].Applied Physics Letters,2020,116(10):101105.
[31]HIROYUKI H.Miniaturized Phased-Array Ultrasound and Photo-acoustic Endoscopic Imaging System[J].Photoacoustics.
[32]BAE J K,VAVILIN A,YOU JS,et al.Smartphone-Based Endo-scope System for Advanced Point-of-Care Diagnostics:FeasibilityStudy[J].Jmir Mhealth Uhealth,2017,5(7):e99.
[33]张升进,唐伟,蒋寅杰.一种转折分光单元及内窥镜光学成像系统、成像方法:CN106094224A[P].2016.
[34]何超,陈晟,何裕源等.电子内窥镜:CN105455768A[P].2016.
[35]彭小健.高分辨率消化道超声内窥镜的设计与研制[D],深圳:深圳大学,2016.
[36]萬勇,冯宇,段西尧等.激光扫描中继镜组及具有该中继镜组的共聚焦显微内窥镜:CN 106802479A[P].2017.
[37]詹涵菁,李强.一种内窥镜照明光学系统及电子内窥镜:CN106510607A[P].2017.
[38]RICHARD WC,JOHN JPF,JOACHIMWB.Compact FluorescenceEndoscopy Video System.US9968244[P].2018.
(编辑:温泽宇)
收稿日期:2021-02-27
基金项目:国家自然科学基金(51675142);黑龙江省普通本科高等学校青年创新人才培养计划(UNPYSCT-2020194);中国博士后基金特别资助项目(20187110313).
作者简介:鲍玉冬(1986-),男,博士,副教授,硕士研究生导师;
齐东博(1995-),男,硕士研究生.
通信作者:魏雯(1988-),女,硕士,医师,E-mail:moziwenwen0722@163.com.
