正畸力测量装置的研究进展
2021-01-16姜金刚王磊张永德马雪峰
姜金刚 王磊 张永德 马雪峰





摘要:固定矫治技术能够有效治疗错领崎形,在正畸临床过程中,各矫治阶段所使用正畸弓丝产生的正畸力大小、娇治效果的预测多根据正畸医生的经验进行判断,治疗结果完全依赖于医生水平,易对患者造成伤害并降低治疗效率。若能准确的测量正畸弓丝产生的正畸力,实现正畸力量化表达,将对临床正畸治疗具有重要的应用价值。在概述了正畸治疗中牙齿移动的力学原理的基础上,对有关正畸力测量装置的研究现状进行综述,分析了该应用研究中存在的主要问题,并对正畸力测量装置的发展前景进行了展望。
关键词:正畸力测量;牙齿移动;力学原理
DOI:10.15938/j.jhust.2021.05.001
中图分类号:TH79;8318 文献标志码:A 文章编号:1007-2683(2021)05-0001-07
0 引言
错领畸形是危害人类健康的三大口腔疾病之一,在儿童和青少年中发病率较高[1-6]。固定矫治技术是利用正畸弓丝在托槽上产生正畸力治疗牙错领最有效的方法[7-9]。正畸力的大小和方向对正畸治疗效果有很大的影响。目前正畸力的确定主要依靠正畸医师的正畸经验,在正畸治疗中,牙齿的机械运动是由一系列的生物物理化学效应引起的。正畸矫治器引起的牙周组织应力的大小会影响牙齿的移动和牙齿的移动类型[10-11]。因此,准确的测量不同正畸矫治器所产生的正畸力对正畸医师设计理想的正畸矫治器具有重要指导意义。
1 正畸治疗中牙齿移动的力学原理
在正畸治疗中,牙齿移动是通过弓丝与托槽结合产生的正畸力和力矩来实现的。基本牙齿移动有5種,分别是整体移动、旋转移动、伸长或压低移动、倾斜移动和牙根控制移动。但在实际的正畸治疗中,牙齿移动是5种基本牙齿移动的组合[12]。虽然临床的牙齿移动是复杂的。但从动力学角度看,牙齿移动可分为平移运动和旋转运动两种基本运动。正畸力矩M与正畸力F之比可以确定牙齿移动的类型,合适的正畸力和正畸力矩是控制牙齿移动的关键。它们不仅影响牙齿移动的速度和旋转的速度,而且还影响牙齿移动的距离[13]。如图1所示,M和F分别表示正牙力矩和力;D为阻力齿心到支架中心的距离;牙缝是牙齿的阻力中心;Crot为牙齿旋转的中心。
2 正畸力测量装置的研究进展
正畸力测量装置可分为直接测量型和间接测量型。直接测量法主要用于直接测量牙齿上产生的正畸力。间接测量法主要用于测量牙齿模型上产生的正畸力。正畸力由安装在牙齿模型上的力传感器采集。
2.1 直接测量正畸力装置
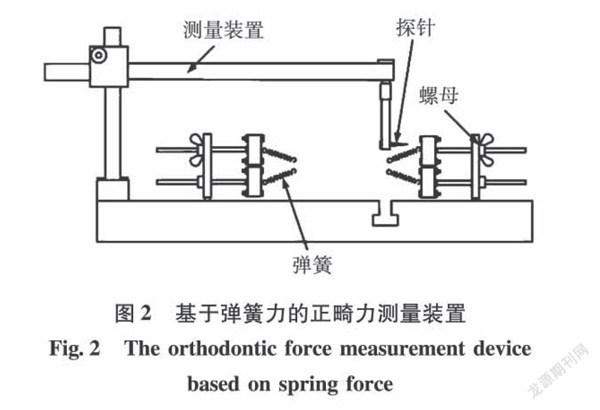
2009年汤文成等人设计了如图2所示的基于弹簧力的正畸力测量装置,本装置采用口内取模和口外模型测量相结合的方法[14]。根据机械力学的原理结合三维空间力学和高等机构学理论设计制造正畸矫治力的三维测量装置。利用四根弹簧与托槽翼相连接,用弹簧力作用重复定位托槽位置,即力的作用点,用四根弹簧的合力替代正畸力。通过测量弹簧两端点的空间位置与伸长量,得到4个弹簧分力的大小和方向,通过空间力学的矢量合成,合成为空间力和力矩。
2011年汤文成等还发明了一种基于力传感器的正畸力测量装置,如图3所示。托架底板与托架底板、插拔垫片、托架与螺母连接后与齿板粘接[15]。然后根据托槽的位置来确定各测量元件的位置。患者佩戴合适的正畸力测量装置,弹性爪与托槽连接,然后拔出可插拔垫片,记录可插拔垫片拆卸前后的力值,可以计算出正畸力。该装置可实现多个牙齿正畸力的同时测量。
2012年汤文成等发明了一种正畸力测量装置,改善了原有测量装置的测量效果,如图4所示。该装置主要由底座、调节元件和测量组件[16]组成。测量组件包括中心杆、压力传感器和夹紧装置。该装置可实现正畸力的快速测量,并且能够在不需要牙体建模和佩戴的情况下进行测量,极大地提高了测量效果。
大多数正畸力测量装置只能测量安装在专用实验平台上的矫形器。如图5所示,2014年Mencat-telli M[17]设计了一种通用的能测量多种矫治器条件下牙齿受力情况的装置,特制的测量平台具有6个加载单元,每个单元上安有一个应变片,分别测量一个维度上的力。实验作用在牙领石膏模型上,分析了四种超弹性弓丝和两种隐形矫治器下的牙齿受力情况。但石膏模型缺乏生物特性,与实际牙齿移动情况差异较大。
2.2 间接测量正畸力装置
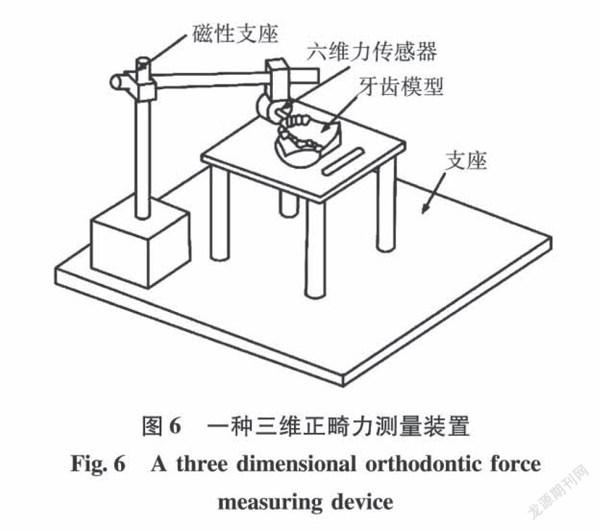
为了提高正畸力测量的可靠性,2014年刘云峰等开发了一种正畸力测量装置,如图6所示。该装置主要由支座、磁性支座、六维力传感器和牙齿模型组成[19]。正畸矫治器安装在牙齿模型上,需要测量的牙齿与其他牙齿分开。确定该装置的最佳位置后,应将磁性支座的接头锁紧,六维力传感器记录正畸力和力矩。该装置结构简单,不易卡住或损坏。
2017年夏泽洋等发明了一种测量装置来测量牙周膜和牙槽骨之间的正畸力,如图7所示。在测量过程中,首先需要建立由牙齿、牙周膜和牙槽骨组成的牙齿模型,然后将牙齿模型与支撑台连接。该测量装置主要由支撑底座、多维力传感器、用于固定齿形的支撑台组成。本装置主要用于利用多维力传感器测量牙周膜与牙槽骨之间的正畸力[18]。该装置可以模拟牙周膜变形对正畸的影响。
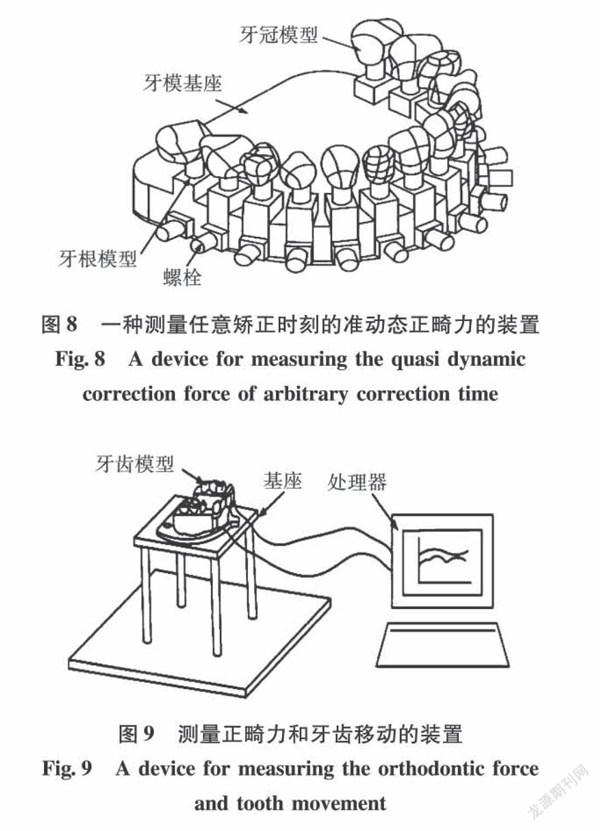
正畸治疗的牙齿移动可分为多个阶段。2017年刘云峰等发明了一种测量装置,利用不同正畸治疗阶段的多个牙齿模型,实现准动态正畸力测量,如图8所示。根据CT扫描数据建立患者的牙列模型,将患者的牙体模型分为牙冠和牙根两部分,然后将正畸矫治器安装于牙体模型,传感器连接到需要测量的牙体[20]上。在测量过程中,根据不同正畸阶段改变牙齿模型牙列,实现准动态正畸矫治力测量。
在正畸力测量中,不考虑牙齿移动的情况下所测得的静态力与临床正畸力有很大的不同。2018年刘云峰等发明了一种可以模拟牙齿移动的正畸力测量装置,如图9所示。利用CT扫描得到的牙齿数据重建牙齿模型,待测牙齿分为牙冠和牙根,力传感器安装在牙冠和牙根之间后压人蜡模[21]。测量是在温度控制箱中进行的,蜡模的硬度可以通过温度控制进而模拟牙齿移动。该测量装置主要由基座、牙齿模型和处理器组成,可测量正畸治疗过程中的动态数据。
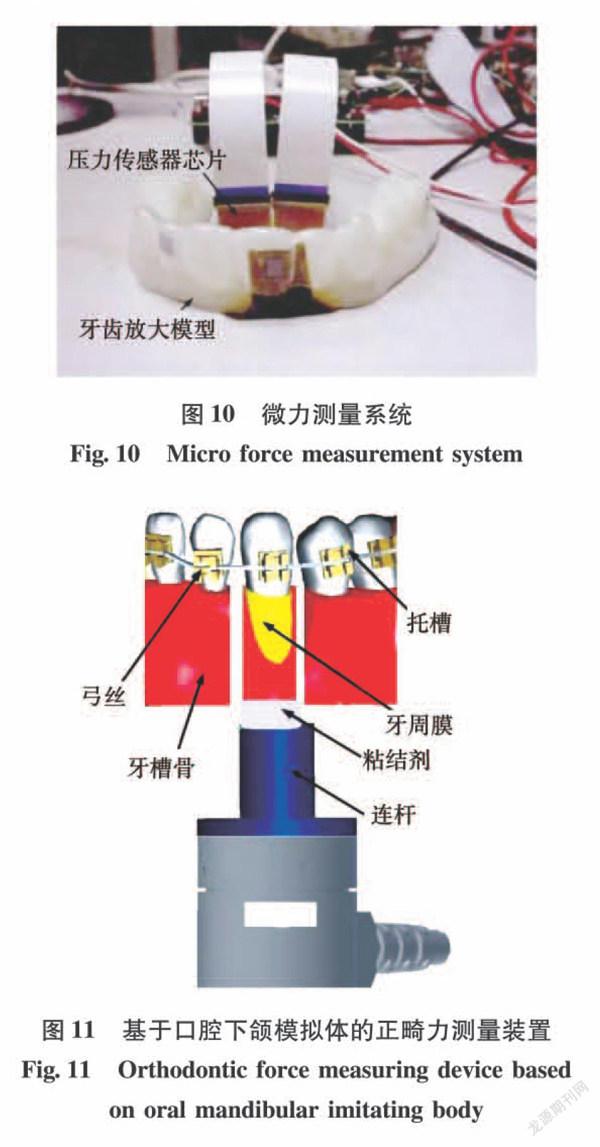
由于牙齿的体积太小,测量牙齿的变形和正畸力难度大。然而,2014年任超超等通过放大牙齿模型测量无托槽隐形矫形器的正畸力,如图10所示。优化后的压力传感器芯片尺寸为7mm×6mm×0.1mm,该压力传感器有13个应力测量敏感单元。标准的牙齿模型被扫描并放大两倍,利用放大的数字模型建立了实验齿形模型。然后用环氧树脂胶[22]将压力传感器芯片粘接在牙模表面,通过采集压力传感器芯片数据计算正畸力。
牙周组织的变形是正畸治疗的基础。然而,在测量正畸力时,牙周组织的变化往往被忽略。为了解决这一问题,2016年陈大亮等提出了一种基于牙体仿生模型的实验装置,如图11所示。牙周膜仿生模型是由两种硅胶Gasket Sealant No.2和RTV 587Silicone以体积比1:1混合的材料制造。根据患者的牙齿扫描数据建立牙齿模型,由正畸医师[23]设计安装实验弓丝,将Nano 17六维力传感器固定在牙齿模型上测量正畸力。
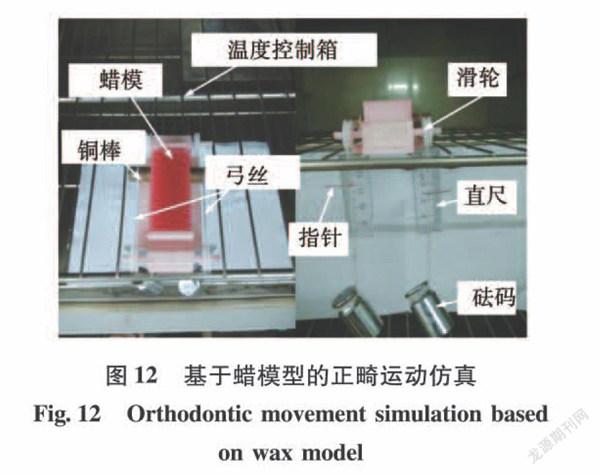
正畸测量通常是基于刚性牙体模型进行的,这与牙周组织的性质有很大的不同。张钦等在一项研究中试图找到一种适合牙周组织生物学特性的材料,在这项研究中,分析了蜡的机械性能,如图12所示。搭建了一个实验平台,用铜棒代表牙齿,分析研究了铜棒在蜡模中不同移动方式下的阻力特性,建立了铜棒在蜡模中不同运动方式下其阻力与移动速度的数学关系模型。提出了一种通过控制温度来模拟齿形运动的方法[24]。本研究验证了蜡作为仿生材料进行正畸力测量的可行性。
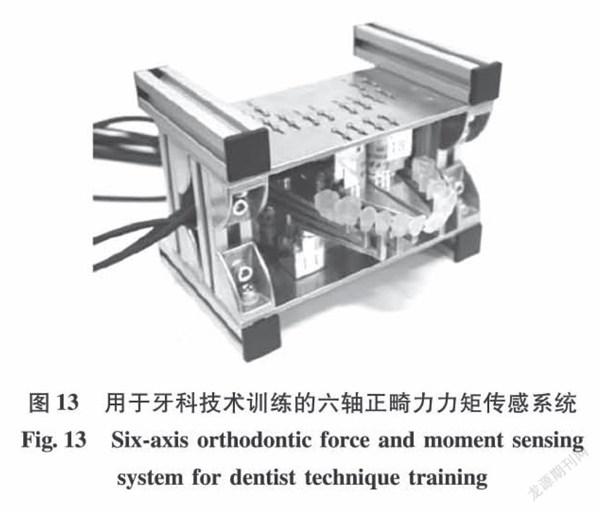
不同正畸阶段的牙列形态差异较大。以往的研究只测量了三维力,无法测量三维力矩,也无法评估三维正畸力矩[25-28]。2016年Yoshiyuki等发明了一种正畸力测量装置,可以模拟正畸治疗中各种类型的牙列[29]。这个实验装置模仿人类的下颌,传感器安装在牙模的后面。如图13所示,该装置由六维力传感器、动作杆、合成树脂牙模型组成。利用这些六维传感器可以测量正畸力和力矩。
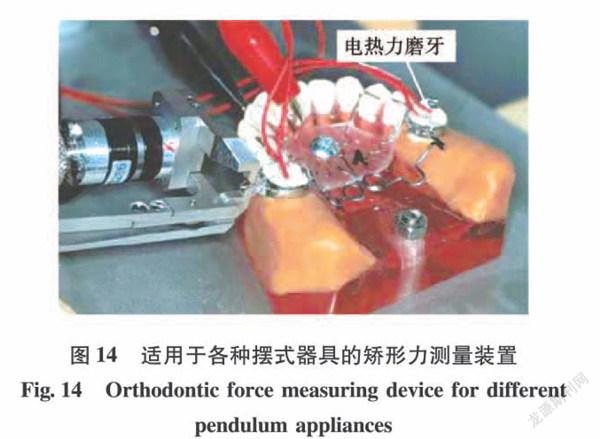
2004年Kinzinger等设计了一种体外测量装置用来研究摆式矫治器作用在牙齿上的矫治力及矫治力矩,如图14所示。本实验装置由以下组成部分组成:在测量中他们使用了两个ETD电热力磨牙,该测量装置包含用于温度控制的电子测量单元、力矩传感器、模数转换器和数据读出装置的传感器单元,能够模拟口腔中温度的变化。这种装置一方面可以真实地模拟体内条件,另一方面可以精确地确定力系统[30]。
许多正畸生物力学文献局限于二维实验研究。如图15所示,2009年Badawi H M等设计了一种三维正畸力测量装置,能够准确测量正畸固定矫治器对同一牙弓[31]中所有牙齿施加的力和力矩。用圆柱体简化代替每颗牙齿,圆柱体的位置可调节以模拟排列位置,每颗牙上都安装有传感器,对被动结扎和普通结扎下侧切牙和磨牙的受力进行了测量,能初步实现牙弓上全部牙齿正畸力的测量,并对被动结扎与其他结扎方式力系统的区别进行了研究。
Fuck等使用多维力传感器测量牙列和支架模型产生的正畸力,如图16所示。牙模安装在一个球形关节上。采用多维力传感器针对搭建好的牙列一托槽实体模型进行了正畸力的测量,传感器安装在机械臂的末端,模型的位置姿态通过底座平台调节,测量了采用镍钛合金弓丝、不锈钢弓丝施加的正畸力大小[12]。
3 正畸力测量装置应用中的关键问题及未来展望
3.1 关键问题
临床医生和研究人员必须首先研究其生物力学来定义和量化应用于牙齿的力系统,然后才能对这些牙齿对正畸力的临床反应做出有效的判断。施加在牙齿上的力应该是一个可控的变量,研究临床应用背后的生物力学可以帮助减少不良副作用[32]。正畸力测量是正畸力系统和牙齿运动研究的基础。然而,目前正畸力测量的一些方面还有待改进:
1)目前,大多数牙列实验模型是由刚性材料制成的,正畸力受弹性变形的影响,刚性实验牙列不能反映弓丝的移动和弹性变形过程。
2)摩擦力对正畸力的影响一直是正畸领域的研究重点。口腔生态环境复杂,除唾液外,牙垢、牙周膜、牙齿运动、咀嚼运动、温度、湿度等也会影响摩擦。然而,这些因素在现有的实验装置中大多被忽略。
3)实验牙列模型的建立大多是先扫描患者的牙齿数据,然后在体外测量实验牙列模型的正畸力。然而,体外测量不能反映人口腔的真实生物力学效应。
3.2 未来展望
针对目前正畸力测量装置的发展现状及存在的问题,未来正畸力测量装置的发展主要分为以下几个方面。
1)刚性实验模型测量的正畸力不能帮助医生设计合适的正畸矫治器。因此,需要对仿生材料构建的牙列实验模型进行研究。
2)在对正畸摩擦力的研究中,生物因素的影响往往被研究者忽略,应该建立充分考虑口腔生物因素的实验牙列模型,首先要考虑温度、振动和湿度环境。
3)在今后的研究中,应研制口内正畸力测量装置。随着电子技术的发展,可以设计出更小的传感器,可将这些传感器集成到正畸测量装置中。测量装置的结构必须小巧轻便,在这些口内正畸力测量装置的帮助下,研究人员可以测量志愿者在任何正畸治疗阶段牙齿上产生的正畸力。所收集的正畸力能够真正用于指导医生设计合适的个性化正畸矫治器。
4 结论
错颌畸形被世界卫生组织列为三大口腔疾病之一。目前,正畸治疗方案依赖于医生经验,弓丝各项参数与正畸力的数学关系尚不明确,因此正畸力测量装置的研究尤为重要。
正畸力測力装置用于测量牙齿受到正畸力的大小,正畸力的大小取决于弓丝形状,牙齿的移动是通过弓丝应力引起牙周组织改建实现的。根据测量类型,将正畸力测量装置分为直接测量型和间接测量型。综述了不同类型正畸力测量装置的结构特点、测量过程及应用。直接测量法具有结构紧凑、使用方便、可直接测量生物因素对正畸力的影响等优点,但测量精度较低,不能同时测量每颗牙齿所产生的正畸力。间接测量法具有测量精度高的优点,可以通过间接测量法研究具体因素对正畸力的影响。
总体来说,随着新结构、传感器、新材料和相关制造技术等相关技术和理论的发展,正畸力测量装置的应用将得到越来越广泛的应用。
参考文献:
[1]STEWART J,HEO G,GLOVER K,et al.Factors that Relate toTreatment Duration for Patients with Palatally Impacted MaxillaryCanines[J].Am J Orthod Dentofacial Orthop,2001,119(3):216.
[2]WU H,TSAI W,CHEN Y,et al.Model-based Orthodontic As-sessments for Dental Panoramic Radiographs[J].IEEE J BiomedHealth Informat,2018,22(2):545.
[3]ZHANG YD,JIA X,JIANG JG,et al.Simulation and Analysis ofOrthodontic Archwire Bending Robot[J].Int J Smart Home,2016,10(8):263,
[4]CHENG C,CHENG X,DAI N,et al.Personalized OrthodonticAccurate Tooth Arrangement System with Complete Teeth Model[J].J Med Syst,2015,39(9):1.
[5]JIANG JG,ZHANG YD,WEI CG,et al.A Review on Robot inProsthodontics and Orthodontics[J].Adv Mech Eng,2015,7(1):198748.
[6]JIANG JG,WANG Z.ZHANG YD.Springback Mechanism Analy-sis and Experiment Study of Australian Orthodontic Archwire withRobotic Bending[J].Chin J Sci Ins,2015,36(4):919,
[7]FEU D,OLIVEIRA BH.Oral Health Elated Quality of Life andOrthodontic Treatment Seeking[J].Am J Orthod Dentofacial Or-thop,2010,138(2):152.
[8]JIANG JG,HAN YS,ZHANG YD,et al.Forming Control PointPlanning and Experimentation of Orthodontic Archwire with Robot-is Bending[J].Chin J Sci Ins,2015,36(10):2297.
[9]JIANG JG,RAN YS,ZHANG YD,et al.Springback MechanismAnalysis and Experiments on Robotic Bending of Rectangular Or-thodontic Archwire[J].Chin J Mech Eng,2017,30(6):1406.
[10]QIAN H,CHEN J,KATONA TR.The Influence of PDL Princi-palfibers in a 3-dimensional Analysis of Orthodontic Tooth Move-ment[J].Am J Orthod Dentofacial Orthop,2001,120(3):272.
[11]XU Z,WU Y,ZHAO L.Effect of Placement Angle on the Stabili-ty of Loaded Titan iummicroscrews in Beagle Jaws[J].Angle Or-thodontist,2013,83(4):659.
[12]FUCK LM,DRESCHER D.Force Systems in the Initial Phase ofOrthodontic Treatment a Comparison of Differentleveling ArchWires[J].J Orofac Orthop,2006,67(1):6.
[13]REN Y,MALTHA JC,MA VH.Optimum Force Magnitude forOrthodontic Tooth Movement:a Mathematic Model[J].Am JOrthod Dentofacial Orthop,2004,125(1):71.
[14]湯文成,魏志刚,李薇,等.一种体外测量口腔正畸力的测量设备及测量方法:CN101411647[P].2009.
[15]汤文成,黄辉祥,吴斌,等.基于力传感器的牙齿矫正正畸力测量装置:CN202060909[P].2011.
[16]汤文成,黄辉祥,吴斌,等.一种牙齿矫正正畸力测量装置:CN202113184[P].2012
[17]MENCATTELLI M,DONATI E,CULTRONE M.Customizedlead Cell for Three-dimensional Force-moment Measurements inOrthodontics[J].Biomed Robot Biomechatron IEEE,2014:238.
[18]夏泽洋,熊憬,陈大亮,等一种新型口腔正畸力测量方法及装置:CN104523347[P].2017.
[19]刘云峰,件健磊,张鹏园,等.一种三维正畸矫治力测量装置:CN203861375[P],2014.
[20]刘云峰,件健磊,范莹莹,等.可模拟任意矫治时刻的准动态牙齿矫治力測量方法及装置:CN106580509[P].2017.
[21]刘云峰,件健磊,周东,等.能模拟牙齿移动的三维正畸力动态测量方法及其装置:CN105250044[P].2017.
[22]任超超,李晓玮,白玉兴.无托槽隐形矫治微型测力系统的研究[J].北京口腔医学,2014,22(2):61.BEN CC,LI XW,BAI YX,et al.Development of the Micro-stress Sensor Measurement System for Invisible Aligner[J].Bei-jing Journal of Stomatology,2014,22(2):61.
[23]陈大亮.基于口腔下颌仿体的牙齿正畸力测量及牙齿应力的分析[D].哈尔滨:哈尔滨工业大学,2016.
[24]张钦.基于蜡模的模拟正畸可控性移动的实验测试与数值仿真[D].杭州:浙江工业大学,2016.
[25]LAPATKI BG,BARTHOLOMEYC7,IK J,RUTHER P.SmartBracket for Multi-dimensional Force and Moment Measurement[J].J Dent Res,2007,86(1):73.
[26]SHI Y,BEN CC,HAO W.An Ultra-thin Piezoresistive StressSensor for Measurement of Tooth Orthodontic Force in Invisible A-ligners[J].IEEE Sens J,2012,12(5):1090.
[27]YOSHIDA N,KOGA Y,SAIMOTO A.Development of a Magnet-is Sensing Device for Tooth Displacement under Orthodontic Forces[J].IEEE J Biomed Health Inform,2001,48(3):354.
[28]BELLE K,KAZUO T,HIROO M.Development of an OrthodonticSimulator for Measurement of Orthodontic Forces[J].1 Med DentSci 2001,48(1):15.
[29]MIDORIKAWA Y,TAKEMURA H,MIZOGUCHl H.Six-axisOrthodontic Force and Moment Sensing System for Dentist Tech-nique Training[C]//Conf Proc IEEE Eng Med Biol Soc,2016:2206.
[30]KINZINGER G,SYRE C,FRITZ U.Molardistalization with Dif-ferent Pendulum Appliances:In Vitro Registration of OrthodonticForces and Moments in the Initial Phase[J].J Orofac Orthop,2004,65(5):389.
[31]BADAWI HM,TOOGOOD RW,CAREY JP.Three-dimensionalOrthodontic Force Measurements[J].Am J Orthod Dentofacial Or-thop,2009,136(4):518.
[32]BURSTONE CJ,MARCOTTE MR.Problem Solving in Orthodon-tics:Goal-Oriented Treatment Strategies[R].Chicago:Quintes-sence Pub Co,2000.
(编辑:温泽宇)
收稿日期:2020-04-02
基金项目:中国博士后基金特别资助项目(20187110313);黑龙江省普通本科高等学校青年创新人才培养计划项目(UNPYSCT-2017082);黑龙江省博士后特别资助项目(LBH-TZ1705);黑龙江省普通高校基本科研业务费专项资金(LGYC2018JQ016).
作者简介:王磊(1995-),男,硕士研究生;张永德(1965-),男,博士,教授,博士研究生导师.
通信作者:姜金刚(1982-),男,博士,教授,博士研究生导师,E-mail:jiangjingang@hrbust.edu.cn.
