单信息条件引导下的光学设备搜索策略研究与实现
2021-01-15孟凡胜黄龙呈徐慧娟
孟凡胜 周 磊 黄龙呈 徐慧娟
(中国人民解放军63620部队,酒泉735000)
1 前 言
所谓引导,就是以模拟量的方式为飞行器提供引导信息并进行目标捕获的过程。对于飞行器的测量任务来说,测控设备的引导信息通常分为中心引导、程序引导和同站互引导等。这些引导信息中一般含有目标的方位A、俯仰E及径向距离R 等,能够将测控设备引导至某一明确的小型空域,以满足引导测控设备快速搜索捕获目标的需求。
但在实际任务中,测控设备所获取的引导信息并不完全包含以上信息,如只有方位A 和径向距离R,目标引导空域范围较大,并不足以支持测控设备快速准确搜索及捕获目标的需求。为区分不同类型的引导信息,通常将含有方位A 和俯仰E 的引导信息称为完全信息条件引导;将只有方位A(含径向距离R)或俯仰E(含径向距离R)的引导信息称为单信息条件引导。
在一次任务行动中,某型光测设备就面临了单信息条件引导的情况,即引导信息只有雷达的方位A 和径向距离R 可以利用,难以对测控设备形成有效的引导信息,所以必须建立新的引导模型,才能够对目标进行有效的搜索和引导。
新的引导模型构想是在收到单信息条件引导信息的方位A 和径向距离R 后,根据当地的地理情况和设备参数,给定预定目标的初始俯仰E,并根据设备的精度设置搜索步长;同时,设备保持随方位A 转动,在一定俯仰范围内进行类似“之”字形扫描,扫描过程中一旦捕获目标,就可以开展正常跟踪测量。
本文基于目标运动特点,结合单信息条件引导信息的方位A 和径向距离R,开发了航迹预测软件和搜索引导软件,实测结果验证了软件的可靠性和实效性。随着后续任务的多样化发展趋势,单台设备执行任务的情况会逐年增多,及时研究各种情况下的引导搜索模式和方法,对于提高单台设备的跟踪能力,有着非常重要的实际意义。
2 目标特性分析
在目标识别跟踪系统中,目标特性包括目标回波信号特征、光谱成像特征、姿态与运动特征、特征选择与融合等,是实现目标探测与识别的重要基础。对于有引导信息条件下的光学设备搜索捕获来说,目标的成像大小和运动特征是与搜索捕获密切相关的目标特性。
2.1 成像大小
一般来说,根据目标大小、目标距离和设备参数,可以计算出目标的成像大小。
2.1.1 识别条件
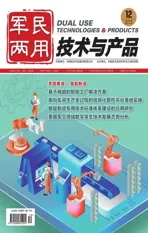
许多研究表明,在不考虑目标本质和图像缺陷的情况下,用目标等效条纹的分辨力来确定红外热像仪成像系统对目标的识别能力,这就是约翰逊准则。根据约翰逊准则,将视觉识别分为3 个层次:探测,识别和鉴别。当判断概率为50%时,目标成像在探测器上所占探测器的像元数情况如表1 所示。
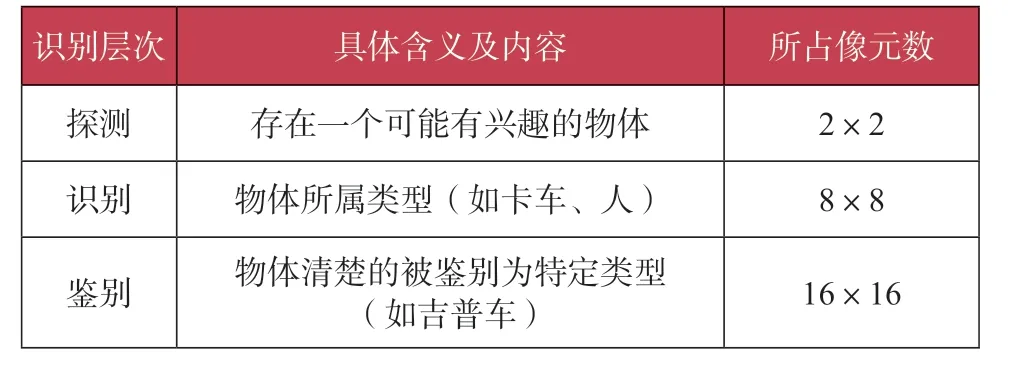
表1 依据约翰逊准则的识别层次与像元数关系表
因此,在实际跟踪中一般认为,大于1~2 个像元能够成像,大于4 个像元能够探测目标。
2.1.2 成像大小估算方法
成像大小估算需要的设备参数包括焦距f、像元数N、像元尺寸d、视场角FOV;目标的环境参数包括目标的大小尺寸、作用距离范围、目标在空中的飞行速度等。
设备空间识别率可采用瞬时视场角(IFOV)表示,是指传感器内单个探测元件的受光角度或观测视野的大小,又称为传感器的角分辨率。
对于探测设备来说,IFOV为设备视场角与其选用的电荷耦合器件(CCD)像元数的比值。例如,某设备选用CCD的像元数为1024×768、视场角为1.24°×0.93°时,其空间识别率,即IFOV为:

目标成像大小与IFOV密切相关,像元数的个数为:

式中,[m,n]为像元数的个数;[L,W]为目标的长宽尺寸;d 为目标距离。
假设目标截面为约1m2的正方形,在15~100km的测量距离内,像元数的个数计算结果如表2 所示。
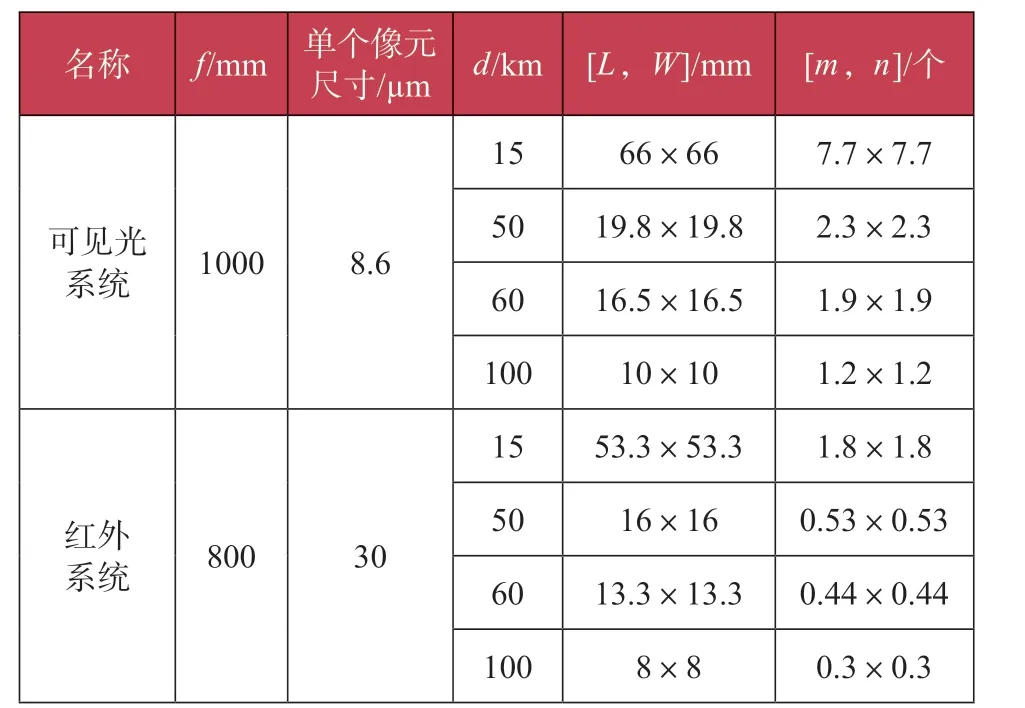
表2 光学系统对不同距离上目标的成像大小计算结果
综合参考计算结果,以及可见光、红外系统的实际成像能力,可见光系统在60km 处对目标的成像大小为1.9mm×1.9mm,近似可探测,因此可认为设备能够对约60km 范围内的此类目标进行跟踪测量。
2.2 目标穿过视场时间
目标运动特征对搜索捕获最大的影响因素是目标穿过视场时间,其与设备视场范围、目标横向速度分量和目标距离相关。
例如,当可见光方位和高低视场范围为20′×16′、红外视场方位和高低视场范围为40′×30′时,在下列不同目标距离对应的空域范围,飞行横向速度按60km/h(目标预计速度为16.67m/s)计算,可以根据目标的速度制定搜索策略,确定目标的可能运动范围,有效搜索并锁定目标。搜索飞出视场的时间(全视场)如表3所示。
表3 不同距离上目标穿越视场时间计算
3 引导扫描速度计算
红外系统拍摄频率不同,对应不同的扫描时间。例如,50 帧/s、100 帧/s 两种频率对应的每帧时间为20ms、10ms。一般来说,设备的高低方向像元数为256 个,按照至少4 个像素作为判断目标的标准,可按每帧移动4 个像元的速度进行搜索。此外,引导扫描速度还必须满足完成一个搜索周期的时间不大于目标飞出视场的时间要求。
假设跟踪的目标高度在3~6km范围内,考虑低仰角的地物遮挡,扫描高度范围可选取2~10km,则对应于不同的距离,视场大小如表3所示。按照以上原则进行扫描搜索,采用50帧/s的帧频进行图像记录,按照30′/s的搜索速度,从低到高扫描8km的俯仰范围需要的时间如表4所示。从计算结果看,设置合适的搜索步长能够满足“一个搜索周期的时间不大于目标飞出视场的时间”的要求。
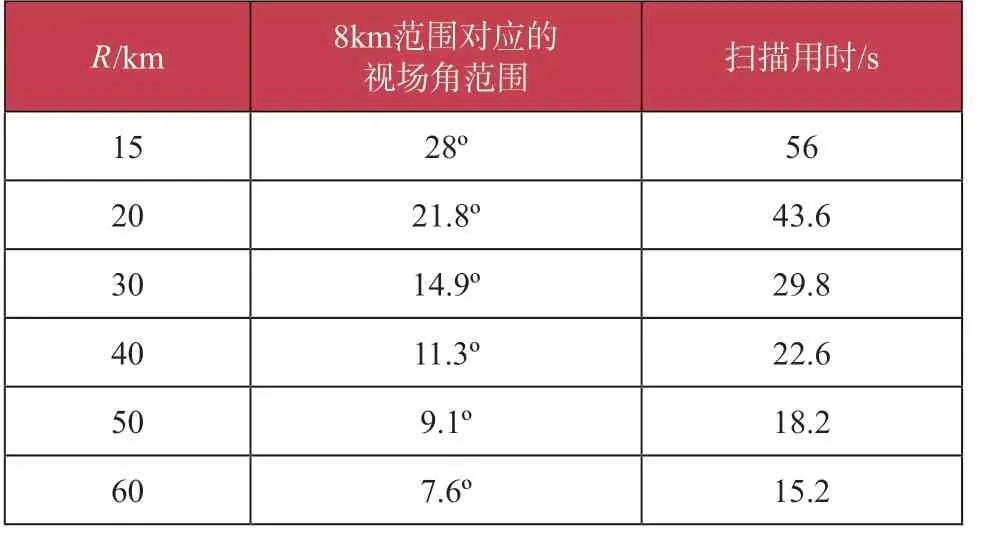
表4 8km扫描高度范围对应的视场角范围和扫描时间
4 扫描方式描述
假设收到的雷达信息第一帧为A、R,则可以根据表4 数据选取参数,序列数据可以表述为(A,1°),(A,2°),…,(A,Emax)。
如果在这一周列中没有捕获到目标,根据风速、风向和雷达的下一帧数据,将A1=A+δA,序列数据可以表述为(A+δA,Emax),…,(A+δA,2°),(A+δA,1°),δA 是下一个采样点与上一个采样点的差。
同理,也可以采取高低角不变,方位角变化的方式进行搜索。按照方位角不变,俯仰角变化,设备扫描形成的轨迹如图1 所示。
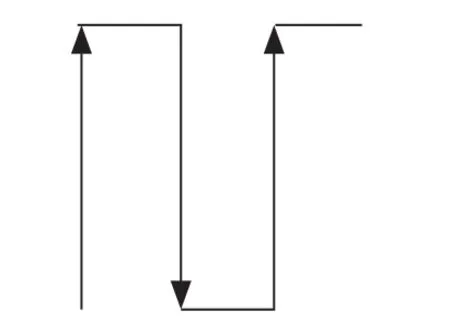
图1 设备扫描形成的轨迹
5 效果分析
根据以上数学模型,研究人员开发了航迹预测搜索软件和程序搜索软件,优化引导仪搜索目标策略,进一步完善了搜索方案。通过实际验证,搜索方案科学合理,搜索自动化程度大大提高。
5.1 目标航迹预测
根据目标运动高度、速度和航向较稳定的特征,研究人员研发了目标航迹预测搜索软件,如图2 所示。该软件可以依据设备站址和目标位置信息,预测生成目标理论弹道。其中,目标位置的经纬度信息可以从指挥中心综合态势席位获取,或者通过其它设备的方位信息和预估高度信息结合设备本身站址解算。
理论弹道的准确性主要受目标运动的稳定性和获取目标位置的准确性影响,通过跟踪多批次俯仰角为3°、飞行状态较稳定的民航飞机,充分验证了航迹预测搜索软件的有效性和可靠性。
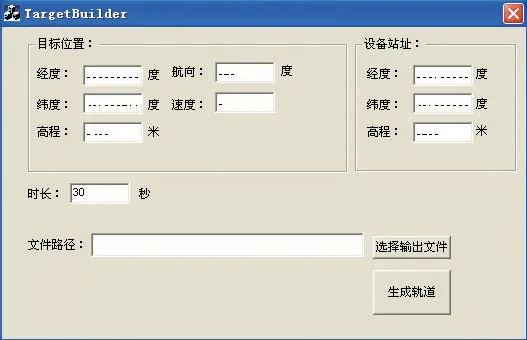
图2 目标航迹预测软件界面
5.2 程序引导搜索
基于目标运动方位角速度和俯仰角速度较小的条件,开发并优化了搜索软件,如图3所示,该软件具有按方位角搜索或按俯仰角搜索的2种搜索方式。方位角搜索范围主要依据同站某雷达提供的方位信息,一般不超过5°;俯仰角搜索范围主要参考某雷达提供的距离和高度估算,较准确的俯仰值由目标航迹预测搜索软件计算获得,一般为1°~5°。搜索间距值的设置主要参考红外相机视场、搜索路径选择和目标运动速度。搜索速度的设置主要参考目标方位角速度的变化情况,以及操作手发现目标后实施单杆引导跟踪的熟练程度和反应能力。
在测试跟踪民航飞机过程中,光学设备均能准确的根据同站某型雷达的指示信息捕获目标,充分验证了搜索扫描软件的可靠性和稳定性。
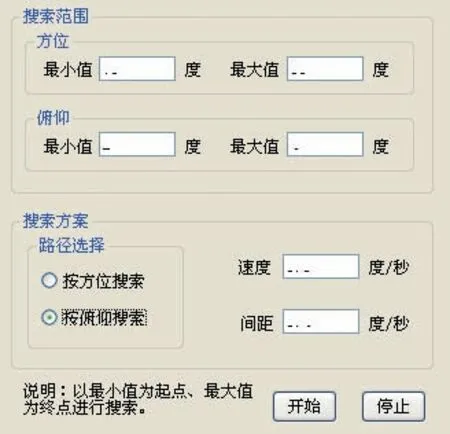
图3 搜索扫描软件参数设置界面
5.3 典型跟踪情况分析
根据同站某雷达通报的方位距离信息,光学设备迅速捕获目标,距离28km,保持稳定跟踪约35min,距离约60km。两套设备跟踪目标的方位角度变化如图4所示,最大方位角度差为3.8°,最小方位角度差为0.1°。通过对比,采用我们设计的搜索策略,光学设备可以快速锁定并稳定跟踪目标,跟踪精度得到有效提升。

图4 光学设备跟踪方位与某型雷达通报方位比较
6 结束语
本文通过预设的航迹预测和搜索软件,实现了单信息条件引导下的目标搜索引导功能,对于发现目标和跟踪记录具有非常重要的意义。根据目标的实际情况和信息提供情况,能够及时进行模型修正,使探测设备更好地适应单信息条件引导下的工作模式。