基于有限元的元胡收获机铲架动态特性分析
2021-01-14张伟东孙浩然任鸿飞任志贵
张伟东,孙浩然,任鸿飞,江 湖,任志贵
(陕西理工大学机械工程学院,陕西 汉中723000)
中国是根茎类作物种植大国,品种众多的根茎类作物是农业现代化的重要支撑,因此,提高机械化收获根茎类作物的水平成为广大科研工作者研究的热点[1,2]。元胡作为根茎类作物的一种,不但有食用价值,还有药用价值[3]。为了提高元胡种植收获效率,减少人工劳作强度,市场上研发了元胡收获机,其中元胡收获机的挖掘铲是其主要收获部件,影响挖掘深度、挖掘元胡的完好性品质等,为此同时不少学者和机构对其及其部件的性能优化做了研究。如,吴道远等[4]针对元胡收获机挖掘铲入土角度的问题,对挖掘铲的入土角旋转调节机构进行了研究,以螺杆带动挖掘铲旋转从而调节入土角度,同时可通过螺母固定挖掘铲的入土角度,使挖掘深度更加稳定。任志贵等[5]设计了一种可调节工作高度的元胡收获机推土铲,基于仿生原理设计了仿生铲齿,减小了铲齿的切削阻力,提高了元胡收获机的工作效率。但在以往的元胡收获机铲架的研究中,研究者只针对元胡收获机实际工作中出现的问题,在其原有的研究基础上对铲架的结构进行完善,并未涉及铲架整体动态特性对元胡收获机工作过程的影响。
在元胡收获推土铲铲出土壤时,由于土壤中杂质较多,使铲架整体经常产生振动,当元胡收获机工作频率与铲架整体固有频率接近时,将引起共振,使铲架振动加剧[6],不利于元胡收获机进行收获工作,因此,通过对元胡收获机铲架的模态分析,求解铲架固有频率和振型,从而有效避免工作频率与铲架固有频率接近。因此,本文以铲架整体为研究对象,使用Workbench 软件,利用模态分析方法得到铲架的各阶模态频率和模态特性,确定影响元胡收获机铲架动态性能的关键模态,为元胡收获机的优化设计提供了一定的理论依据。
1 元胡收获机铲架整体有限元模型
元胡收获机整机主要由破碎机构、输送机构、筛分机构、行走机构和驾驶台组成。收获机时,首先通过高度调节装置使破碎机构楔入土壤,收获机开始行走的同时,破碎辊转动将推土铲铲起的土壤破碎,输送机构将破碎后的土壤送至筛分机构,将土壤和元胡分离,从而实现收获。
元胡收获机铲架包括推土铲和推土铲两侧的固定架,以及固定架的连接板,如图1 所示。
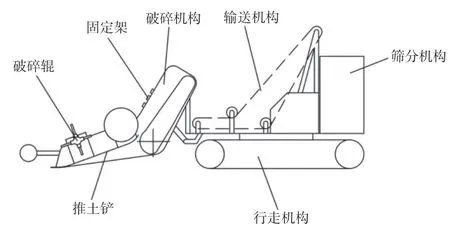
图1 元胡收获机整机示意图
铲架整体主体作为焊接件,各部位的尺寸精度较低且留有焊缝,不符合有限元模型建模要求,因此在铲架建模时对各尺寸进行修整,以消除间隙,从而创建合格的铲架模型[7]。将建好的模型导入Workbench 分析软件后,将材料定义为Q345,单元尺寸定义为5 mm,划分单元格后,其单元数为75 633,节点数为75 652。元胡收获机铲架整体有限元模型如图2所示。
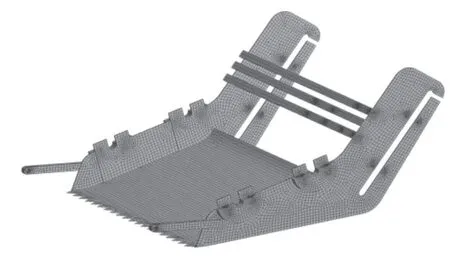
图2 铲架整体有限元模型
2 模态分析
2.1 边界条件
在有限元分析中,零件的边界条件分为两种:一种是载荷边界条件,此条件可根据具体工况计算出载荷的具体数值;另一种是约束边界条件,约束边界条件即为该零件与其它零件连接的状态,只能根据推导过程得到在软件中设置的约束方式,比如零位移约束,该条件无法计算出具体数值,本研究中铲架整体的边界条件即为约束边界条件。
自由模态分析时,铲架整体视为无工况条件,即铲架在无约束边界的条件下进行模态分析。约束模态分析时,铲架约束状态与元胡收获机工况有关,此时元胡收获机的工况为:铲架楔入土壤,收获机行走过程中铲架同时受到土壤的阻力和已铲起土壤的重力作用,土壤的阻力和重力作为激励因素使铲架发生振动,该工况条件下铲架的约束方式为两侧固定架施加固定约束。约束模态边界条件推导过程如下所示:
由经验可知[8],任意形式边界约束条件为:

式中:i、j 为位移分量号,C0、C1为给定常数。经改写可得到铲架边界约束条件,如下式所示。

为处理此约束,先构造如下广义位移向量:
即:
简记为:

式中{u}为结构位移向量。则结构方程为:

将式(5)代入式(6)可得:

两端同左乘[λ]T,得:

即:
可得:

通过位移向量变换,任何形式的约束条件都可化为零位移约束来处理。由上述工况条件可知,对铲架进行约束模态分析时,铲架的约束边界条件即约束类型为零位移约束,即将铲架6 个自由度的位移全部约束为0。
2.2 自由模态分析
自由模态是零件本身在无约束状态下自由振动的固有属性。如表1 所示,为元胡收获机推土铲前6阶模态的固有频率和最大变形量。

表1 铲架前6 阶自由模态

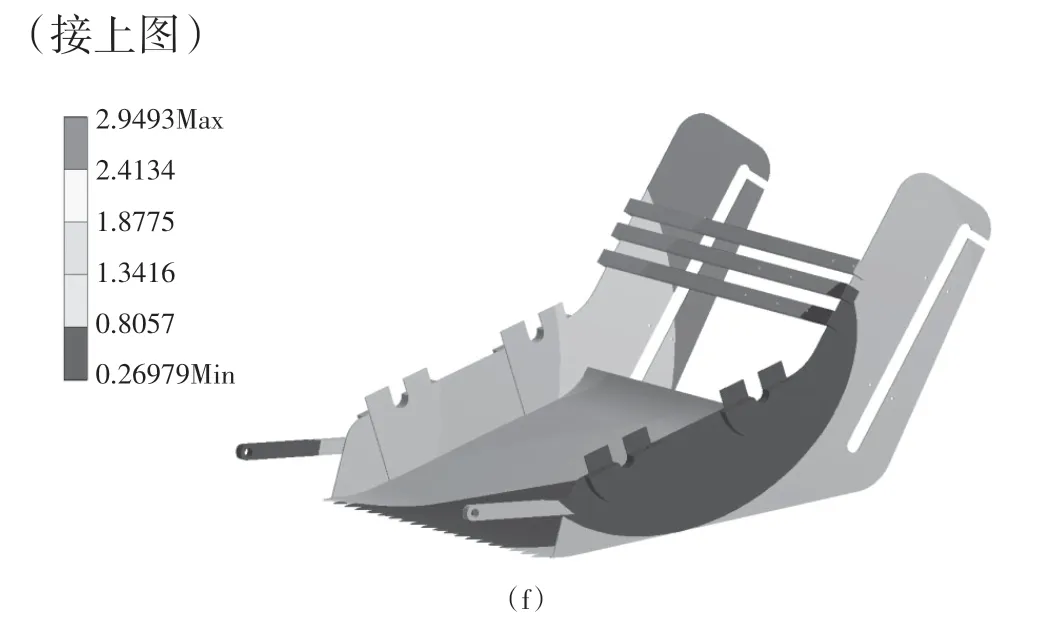
图3 推土铲前6 阶振型
通过对铲架自由模态分析可知,铲架的前4 阶模态主要为刚体模态。从图中可以看出,铲架的变形主要分布在两侧固定板和铲前侧滚轮支架铲处,这些区域是影响铲架振动特性的主要区域,设计时应着重考虑这些频率,以避开外界激振频率。从图c、f可以看出,最大位移分别约为3.043 mm 和2.949 mm,且主要位移发生在两侧固定板与元胡收获机铰接处,此处是铲架的固定部位,对元胡收获机的可靠性影响最大。
2.3 约束模态分析
约束模态是常见的结构模态,主要表现为零件结构在约束条件下自由振动的固有属性。在铲架和机身铰接处施加固定约束后,对铲架整体进行约束模态分析,如图4 所示。
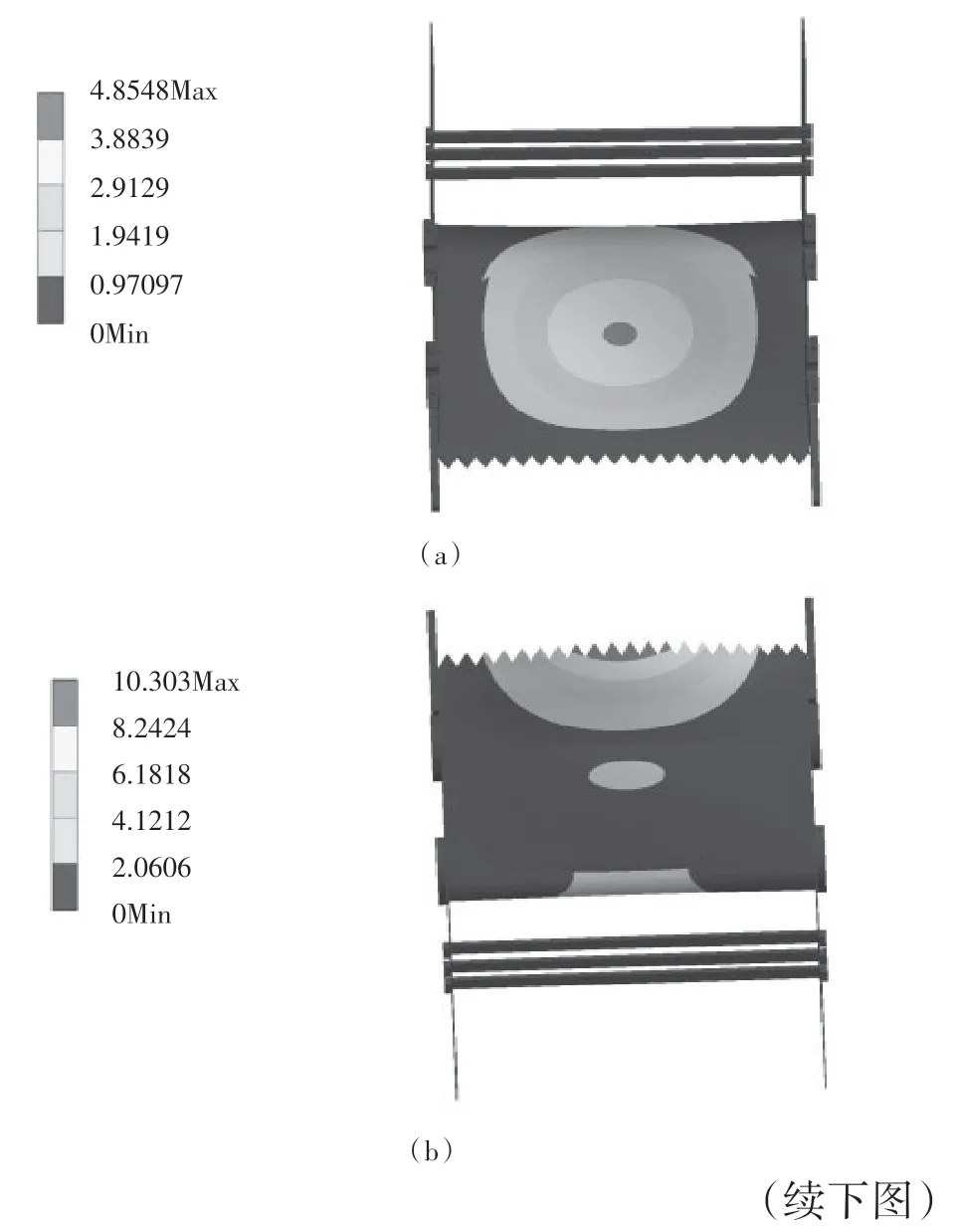

图4 铲架前6 阶振型
如表2 所示为铲架约束模态的前6 阶固有频率和最大变形量。

表2 铲架前6 阶约束模态
从图4 中可以看出,铲架的第1、2 阶变形主要分布在推土铲中间部位,最大变形为4.963 mm;铲架的第3、4 阶变形主要分布在推土铲铲齿中间部位,最大变形为10.303 mm;铲架的第5、6 阶变形主要分布固定板链接带,最大变形为11.403 mm。在两侧固定板和铲前侧滚轮支架铲处。
综上,通过对元胡收获机铲架自由模态和约束模态分析可知,在元胡收获机铲架的设计过程中,应避开元胡收获机发动机的激振频率,同时,可在铲架变形较大的部位增加板材厚度,或通过后续对铲架进行结构优化使其具有良好的动态特性,从而保证元胡收获机的可靠性。
3 结束语
建立了元胡收获机铲架的有限元模型,用Work bench 对铲架整体的自由模态和约束摩天进行求解,计算了铲架整体的前6 阶固有频率,分析了元胡收获机铲架的主振型,为元胡收获机铲架后续的设计和减振优化提供了一定的理论依据,对提高元胡收获机的稳定性和可靠性具有重要的理论意义。
