基于MCD 平台的气动手抓设计与控制仿真研究
2021-01-14赵永信黎玲萍
赵永信,黎玲萍
(广西工业职业技术学院机械工程系,南宁530001)
0 引言
随着智能制造产业的发展,西门子公司推出了数字化双胞胎系统,新型MCD 机电一体化概念设计应运而生。机电一体化概念设计具有集成性,把机械设计和控制自动化等融合起来,缩短了产品的生产周期,在产品还没有实际制造出来之前,已经进行了功能方面的验证,对新产品的生产成本影响很大[1]。
在国内外,针对机电一体化概念设计的相关研究不胜枚举。肖祖东等人[2]对比了传统和 MCD 系统下所完成的机电产品概念设计的优劣,并通过研究圆形装载机的MCD 概念设计验证了其可行性。Reinhart Poprawe 等人[3]在文中提出机电一体化概念设计应该以实现功能结构为首要,这样可以缩短生产周期。吴雁等人[4]以数控车床上下料为研究对象,实现了其MCD 设计与控制仿真。
本文以气动手抓为主要研究对象,以实现其功能性设计为主,对气动手抓的三维虚拟模型进行机械设计并完成其动态仿真。
1 气动手抓的三维模型机械设计
本文首先建立了气动手抓的三维模型,根据其动态仿真需求完成机械设计,机械设计部分主要是为了MCD 动态仿真验证其运动功能是否可行,机械设计部分主要包括以下几点:
1.1 创建三维模型
NX 是一个集成度很高的软件,参照工业机器人气动手抓实物,利用NX 软件对气动手抓进行三维建模,在建立模型后,考虑到控制气动手抓动作时,气动手抓的两个抓手的模型是一个整体,利用结合命令分别把气动手抓的左右抓手合成一个整体。如图1所示。
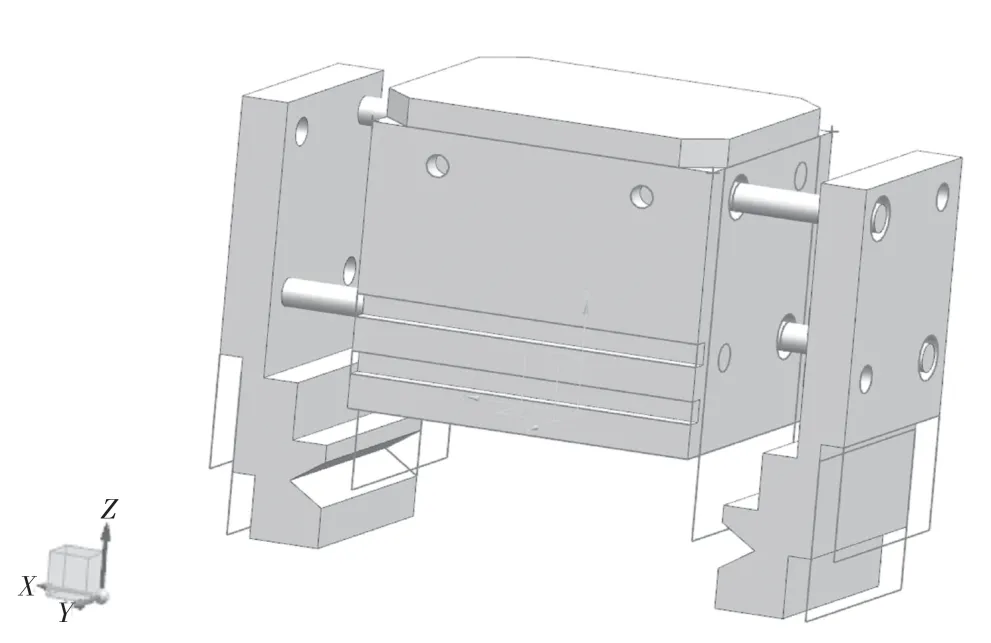
图1 气动手抓三维模型
1.2 基本机电对象设计
机电对象设计的目的是考虑到模型能够在物理系统的控制下运动,定义模型中的运动部分为刚体、碰撞体等,使得模型的运动部分具备了相应的物理属性,比如质量、重力和惯性等。该气动手抓的动作比较简单,主要考虑其气动手抓的两个手抓的夹紧和释放,由于两个抓手在运动时是一个整体,所以分别定义两个抓手为刚体,赋予其物理属性。在软件界面打开刚体命令,在弹出的界面中分别选取气动手抓的左右抓手,在质量和惯性矩处选择自动即可。
1.3 运动副设计
机电设备在运动时需要考虑其运动副和约束,气动手抓的运动主要是两个抓手的直线运动,相当于2 个滑动副,故在菜单栏选择“插入——运动副——滑动副”命令,在滑动副命令窗口中选择刚体为连接件,基本件不用选取,指定滑动副的轴矢量方向为指向气动手抓的内部,如图2(左)所示。
1.4 执行器设计
气动手抓的两个手抓的共同滑动可以实现其夹紧和释放两个动作仿真,但是滑动的速度和距离不是无限的,所以需要通过执行器来控制。在菜单栏选择插入——执行器——位置控制,在打开的窗口中选择机电对象为滑动副,设定其位置为0 mm(此处设置为0 mm 是为了后期实现气动手抓夹紧松开的动态仿真效果),速度为20 mm/s,如图2(右)所示。

图2 运动副和执行器设置界面
2 气动手抓的三维模型动态仿真
NX 软件平台中的机电一体化概念设计模块具备模型的动态仿真功能设计,气动手抓的功能设计主要有两个:第一个是气动手抓的夹紧和释放功能;另一个是检测气动手抓的状态的传感器检测到信号后输出其状态信号,对于工业机器人自动控制系统的气动手抓来说,利用磁性开关实现这一检测功能。
2.1 制定信号表
从气动手抓的动态仿真需求分析来看,需要输入一个信号控制其夹紧和释放,同时检测其状态的磁性传感器检测到信号需要输出信号,所以在MCD中添加2 个信号,一个输入信号IN_Grip 用于夹紧和释放,一个输出信号为磁性开关输出信号。
2.2 信号适配器设置
添加了信号之后,需要对这些信号之间的关联进行配置,这就需要进行信号适配器设置,信号适配器的设置过程是依据气动手抓的动作过程来配置的。气动手抓的动作过程一共有3 个,所以接下来一个一个的分析,并配置其信号。
首先,气动手抓在输入夹紧信号IN_Grip 为1 状态时,手抓实现夹紧动作,在机械设计部分本文是利用两个手抓的滑动副来实现此动作,故需要滑动副的运行参数中定位到一定的位置,故在信号配置界面的添加参数处,为左右两个气动手抓添加位置控制定位参数Paremeter_1 和Paremeter_2,如图3 所示。

图3 MCD 中信号适配器设置界面
其次,气动手抓在输入信号IN_Grip 为0 状态时,气抓实现释放动作,在机械设计部分本文同样是利用两个手抓的滑动副来实现此动作,故需要滑动副的运行参数中定位参数设置为0 mm 即可。
综合以上两个动作仿真要求,只要使得气动手抓输入信号为1 时,两个手抓的定位参数同时为一定的数值,那么就可以实现夹紧的动作效果;同样的道理,只要使得气动手抓输入信号为0 时,两个手抓的定位参数同时为0 即可。信号配置公式处(图3(b)) 的含义就是如果IN_Grip 为1 时两个定位参数为20,否则为0。这样就实现了气动手抓的夹紧和释放的动态效果。
最后,在气动手抓夹紧后,磁性开关输出信号Sensor_out 会变为1,当气动手抓释放后,磁性开关输出信号会变为0。
2.3 仿真序列
仿真序列即气动手抓的动作过程的 程,在NX的MCD 模块中添加序列仿真,实现对气动手抓的控制,如图4 所示。
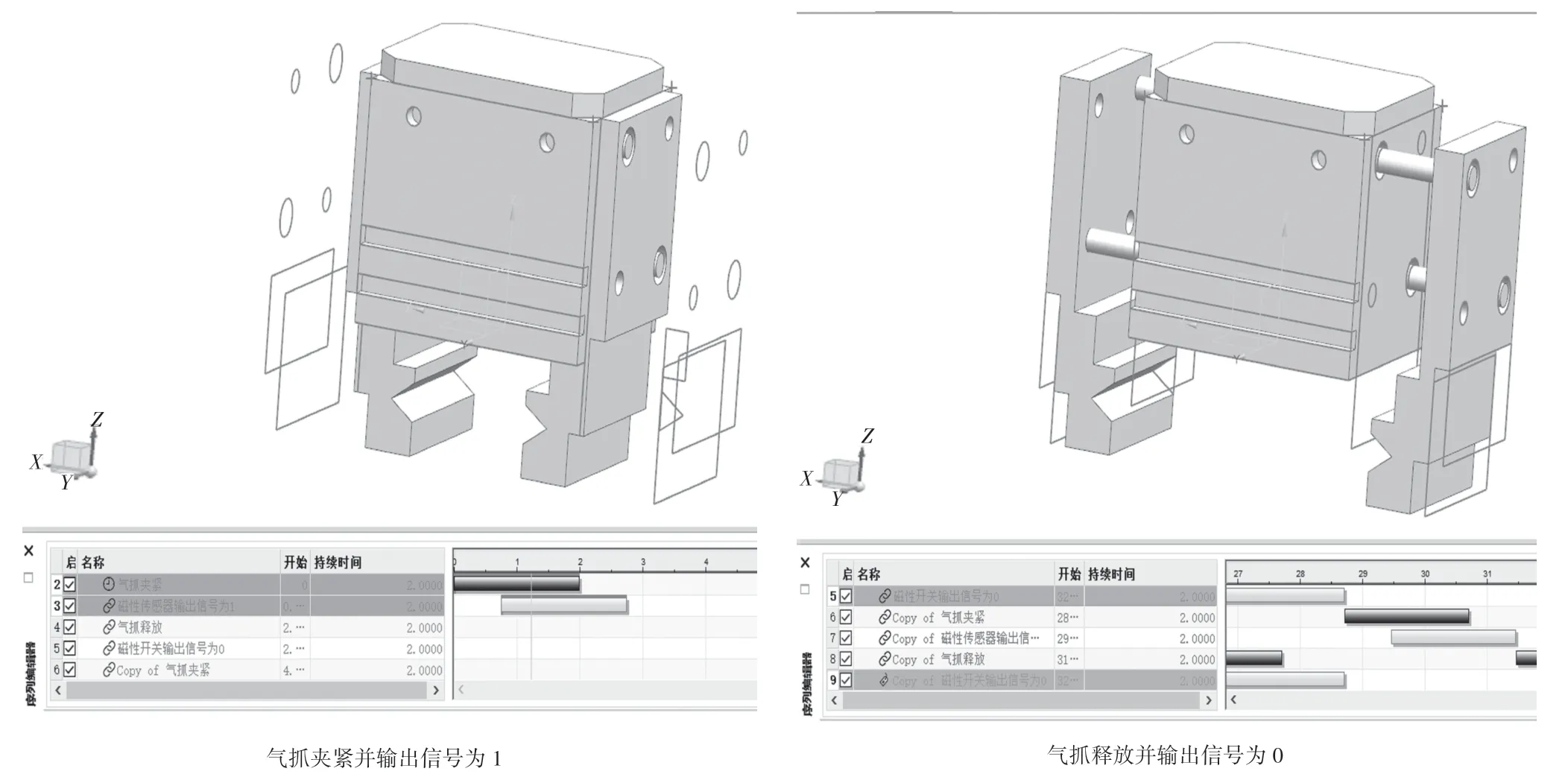
图4 仿真序列
从以上两个仿真试验图可以看出,利用MCD 平台实现了气动手抓的夹紧和释放的动态仿真,故验证了MCD 对于产品功能性设计是可行的。
3 总结
本文以气动手抓的夹紧和释放功能为设计主导,在完成气动手抓的三维模型等机械设计后,实现了动态控制仿真,并详细阐明了设计步骤,为基于MCD 平台的机电产品一体化概念设计提供了参考案例。
