空地协作机器人研究综述
2021-01-13赵津刘畅
赵津 刘畅





摘 要:空地协作是当今多智能体研究领域的热点,具有区域覆盖面广、环境适应性强、任务执行率高等特点。相比于单一智能体系统,多智能体协作突显出了更强的数据匹配、自由协同、更好的系统冗余程度等特点,在更多领域广泛应用。同时其充分利用异构多机器人的功能互补性,组成跨域协作系统,实现任务协同和信息共享,从本质上提升面对复杂环境和任务规划的感知能力、执行能力和运行效率。因此,多智能体的有机协调、跨域协作等将引领未来机器人技术与应用的新模式。从空地协同进行综述,即以无人驾驶车辆(unmanned ground vehicle, UGV)与无人机(unmanned aerial vehicle, UAV)协同为研究对象,分析了空地协同系统的设备类型,对空地协作的任务类型、衡量标准、面临环境、角色功能以及协作模式进行了描述,并探索在异构机器人平台下的感知、决策和任务执行等能力,提出了对当前可能改善空地协作系统的见解和未来可能面临的挑战。
关键词:跨域协同;多智能体;空地协作;任务规划
中图分类号:TP11;TP242 文献标志码:A
基金项目:国家自然科学基金资助项目(51965008);贵州省科技重大专项资助项目([2019]3012)
近年来,人工智能和移动机器人领域的快速发展带来了越来越多的好处,大到无人驾驶车辆、医疗服务型机器人,小到智能手机、智能穿戴设备等都与人类生活息息相关。随着科技进步和生产力的提高,在科研领域中多机器人协作已成为当今多智能体研究领域的热点。相较于单一智能体系统,多智能体协作有着区域覆盖面广、环境适应性强、任务执行率高等特点,在该领域中受到广泛研究人员的青睐。在工业场景中,协作机器人正被用于制造业,例如移动机器人在物流仓库中有序配送。尽管如此,机器人协作在民用领域中仍然存在着巨大的挑战,例如,它们需要与人类进行交互并在未知环境中部署[1-3]。在民用应用中,搜索与救援是一个关键场景,其中异构机器人的协作有可能通过更快的响应时间来拯救生命[4-5]。在搜救(search and rescue, SAR)行动中,多机器人协作也可以显著提高搜救人员的效率,加快对受害者的搜索。首先,确定搜救范围并利用无人机做初步探测,实时绘制环境地图,同时对搜救行动进行实时监测,或建立紧急情况下的通讯网络,最后利用无人车进行路径规划、物资运载等。因此,异构机器人组合——UAV/UGV的空地协同系统能够为搜救和探索行动提供更大的优势。
无人机(unmanned aerial vehicle,UAV),特别是多旋翼无人机(以下简称“无人机”),因其新颖的结构布局、独特的飞行方式、较低的价格,使其成为当前机器人领域的研究热点。它们能快速通过障碍物、粗糙的地形或者陡峭的山坡,并且能够从高空提供视野[6]。然而,无人机的载荷与电池寿命是有限的,因此很难执行需要重型设备或复杂操作的任务。
无人驾驶车辆(unmanned ground vehicle,UGV)是当前自动控制领域研究的热点,一方面,在道路交通中,该技术在提高交通安全、效率、舒适性、便利性等方面存在巨大潜力;另一方面,UGV有更高的电池容量和更大的有效载荷,这意味着它可以携带更重的传感器、更强大的计算机和复杂的操作设备来执行任务[7]。但它们往往受到传感器范围、地形穿越性和攀爬能力等限制。
本文针对UAV/UGV空地协同进行了全面的介绍,从系统层面讨论空地协作,考虑作业环境、通信、自主水平和人机交互;从任务导向出发,将UAV/UGV协同分为搜索和救援,并结合相应示例分析空地协同中用到的理論和工程方法;针对跨域多机器人协作的未来发展趋势提出看法。
1 空地协同下UAV与UGV的基本要素
空地协同系统的基本要素:UAVs、UGVs、任务、环境。此外,UAV和UGV的结构、功能、优势,以及任务的不同也是实现空地协同的必要条件。
1.1 UAV与UGV的类型
UGV在不同的空地协作系统中可以采取不同的构型,通常采用两种构型:履带式和车轮式,如图1(a,b)所示。履带式可以提高在复杂或非结构地形的牵引力[8],而车轮式可以通过车轮的使用类型和车轮数量来定义。正如SIEGWART等[9]对UGV稳定性、机动性和可控性的描述,不同车轮的结构各有优缺点。
UAV类型因任务而异,如图1(c, d, e)所示。在协同系统中使用的UAV可以分为单旋翼、多旋翼、固定翼。
单旋翼(直升飞机):单旋翼飞机可以垂直起飞、降落、悬停、前后飞行,相比于多旋翼更加稳定[10]。然而,带有单个巨型旋翼的飞机具有更高的价格和机械复杂度。
多旋翼:这类无人机有一个或多个旋翼,可以通过调整旋翼速度来实现稳定的悬停和飞行。多旋翼在民用产品中更为广泛[11-12]。
固定翼:固定翼无人机相比多旋翼无人机具有更低的能耗和更强的续航能力,然而它不能悬停和转弯,这便限制了该类无人机在某些特定任务下的应用部署。
1.2 UAV与UGV的任务类型、衡量标准与应用场景
1.2.1 任务类型
空地协同系统通常需要完成各种不同的任务,其复杂、耗时程度各不相同。任务的复杂程度决定了任务的难度,而任务的难度又影响到完成任务所需的设备数量、类型及准确率。例如,单个UGV可以进行小规模的地图构建、设备取放和导航等问题,多个UGV又可以根据任务的合作程度进一步区分:从分散式协作到集中式协作。分散式协作可以被分解成多个独立执行的子任务,UGV之间的互动与依赖关系将会降低,这方面包括大规模勘探、协作式建图、跟踪与监视等。在这种情况下,协作设备所处环境可以被划分为互不相干的区域,UGV只需在其指定的区域内运作,然而集中式任务是不可分解的,需要UGV之间的相互协作。
1.2.2 衡量标准
衡量标准对于评估一个系统的性能、可用性、效率、质量和鲁棒性至关重要,其也可用于评价空地协作系统及其演化的跨域多机器人系统的有效性。空地协作系统的一些评价指标属于特定领域,对于勘测、建图、定位与导航来说,位置精度的误差是衡量标准之一[13]。除了一些特定领域的标准外,空地协作还有几个常见的指标,包括:解决方案的最优性、可扩展性、鲁棒性、资源利用率、耗时、泛化能力和负载平衡等。
1.2.3 应用场景
环境为UGV和UAV提供了可以感知、交互和改变的“外壳”,以及可以运行和协作的空间。UGV和UAV所面临的环境有很大差异。UGV面临的地面环境是复杂多样的,例如陡坡、沟渠等,这些可能限制UGV的行为并迫使它们改变运行轨迹。此外,结构化和非结构化的道路目前也有其定义的标准范围。结构化道路具有已知的、恒定的几何形状(车道宽度、路面标记、曲率半径等)。非结构化道路可能具有多变的几何形状,车道容易出现中断的情况,并且很难从周围场景中区分出来(例如,已铺装或未铺装的道路等)。环境中的动态物体(人类、动物、高速行驶的车辆)可能会在没有警告的情况下突然变更轨迹,这给UGV的运动规划带来挑战[14]。复杂的环境(例如,遮挡、杂乱的背景、光线的变化)也会使检测变得困难。
与UGV面临的地面环境相比,UAV面临的空中环境相对简单。空中环境相比地面环境的优势在于:
1)空中环境范围较广,无明显障碍物,适合機动性强的UAV执行飞行工作。
2)相比于地面环境,空中环境受场地限制较小。
3)国际民航组织规定,遥控飞机等不会对民航和军事机密造成影响,一般不需要审批便可执行飞行工作,而UGV在路面环境形式需要遵守相应的法律规定。
4)空中环境的安全性高于地面环境。
类似的,空中也存在复杂的环境条件,例如,树叶、雾霾、飞行的鸟类、多变的天气,会使无人机探测环境中的物体变得更加困难[15]。
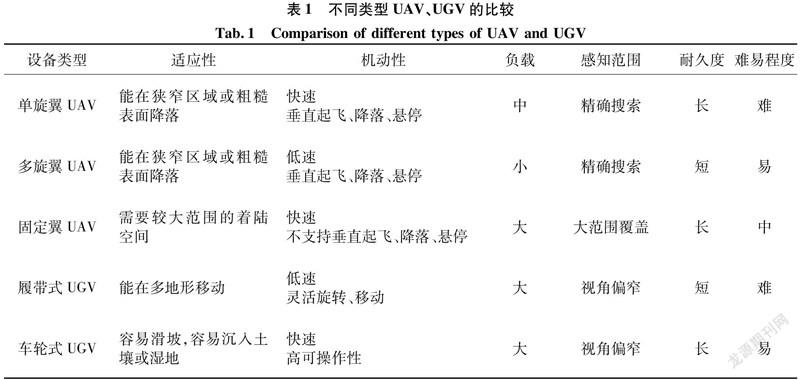
1.2.4 异质性和互补性
表1列出了UAV和UGV的特点。从表1可以看出:一方面,UAV和UGV都有自身的局限性,这在一定程度上降低了它们执行任务的效率[16];另一方面,UAV和UGV在动力学、速度、传感器配置、通信功能等方面的巨大异质性和互补性,使UAV和UGV在协同下能够完成各种复杂的任务。虽然UAV/UGV协作属于跨域多机器人的范畴,但是UAV和UGV之间存在很大的异质性,目前关于跨域多机器人系统的研究成果不能直接用于其中。
与现有同构机器人的处理方式不同,UAV/UGV协作系统需要处理来自完全不同的平台数据,依据决策分析模块,有效协调二者的行为。因此,空地协作系统的研究具有一定挑战性。通过UAV辅助UGV开展导航、编队、运输、侦查、目标跟踪等任务,能够有效拓宽二者的作业能力,提高执行任务的效率,如图2所示。二者的互补性主要体现如下:
1)无人车能够近距离精确定位地面目标,但在环境信息未知或部分可知情况下,车载传感器对环境的感知能力存在较大局限,只能实现局部的路径规划[17-19]。而无人机则具有更广阔的视野,可以在特定高度得到周围环境的全局信息,但由于高度原因也丢失了许多局部信息。通过二者协同,可以实现无人车的全局路径规划。
2)在复杂环境中,无人车载传感器对负高度障碍物检测能力有限,并且缺乏足够的预判[20-21]。而无人机可借助较高的工作高度和悬停等功能,对负障碍等特殊地形进行检测,或将疑似区域预先通知无人车,以便无人车利用自身感知系统进行检测。
3)在执行动态目标检测与跟踪等复杂任务时,比如追捕逃逸者、灾后救援等,由于障碍物遮挡等因素,无人车获取环境信息受限,执行任务效率低,而无人机则可以借助机载传感器为无人车提供一个感兴趣区域(region of interesting,ROI),进而利用无人机与无人车协同系统有效地提高执行任务的效率[22]。
2 空地协作系统中各智能体的角色和作用
UAV和UGV的特性使二者具有很强的互补性,不同角色与功能的组合使这类空地协作系统更有前景。首先,在捕捉地面特征时(例如,移动的行人、障碍等),作为执行器的UGV通常受到速度、环境遮挡及交通流等限制,而作为传感器的UAV则能快速部署,寻找到目标。其次,由于无人机具有高空多自由度作业的优势,它们的通信能力(例如,北斗/GNSS准确定位、低延时的视频或数据传输等)比UGV更难被障碍物阻断,而UGV受到周围较高建筑物的影响,容易丢失外部定位信号,也会因自身较低的高度丢失定位信号。因此,位于不同位置的UAV可以作为通信桥梁将UGV与自身间接联系起来[23-24],确定UGV在真实环境下的定位。再次,由于自身能量的限制,UAV仅能执行短途航行等任务,而作为载体的UGV则具有较大的载荷能力,如图3所示。
2.1 充当传感器的UAVs和充当执行设备的UGVs
这类空地协作系统中,UAV作为传感器收集、传输、检测,以及追踪目标相关的信息,而UGV则依据UAV传递的信息规划路径并反馈路面实时状态,以便作进一步的修正。通常,UAV有着高机动性和较宽的视野范围,因此可以迅速捕捉到目标。UAV将收集的信息传递给UGV能大大加快任务的执行效率。类似的,自动化水平不同的UAV也会传递不同层次的数据,如图4所示。
早期对该主题应用的研究依赖于UAV的手动控制,其在UGV部署之前收集该地区的数据,属于离线处理、两阶段的方式。文献[8]中,STENTZ等证明了预先从空中收集的数据可以提高UGV的规划效率,但却存在地图无法多次复用、保存周期较短的缺点。随后,KELLY和VANDAPEL等[25-26]针对上述问题提出了多机器人协作系统,其中通过UAV获得预收集的数据可以提高UGV的地面导航能力。
随着自主探索技术的不断进步,无人机可以采集地面图像,然后通过图像处理技术进行校正等处理,同时自动构建环境地图,使UGV可以避开障碍物并执行任务。KSLIN等[27]提出了一种基于高程地图的UGVs定位方法,该方法允许UGV在UAV提供的参考地图中找到自己的相对位置和方向,无需依赖GPS等定位传感器。ZHANG等[28]开发了一套自主的空地协作实地勘察系统,其中UAV为UGV提供了一个鸟瞰图,用于避免碰撞并进行路径规划,当任务完成后,UAV将降落在UGV上。PETERSON等[29]提出了一套空地协作系统,该系统利用UAV的俯视视角来确定UGV的行驶路径并实时纠正。JIN等[30]则采用两架UAV为UGV提供立体视觉,利用二者的视差计算高度图,由UGV在决策过程中使用。庄严团队[31]开展了室内场景下空地协作的环境感知研究,提出了一种无人车搭载3D激光传感器开展环境建模,无人机搭载视觉传感器对地面移动机器人相对位姿进行估计的方法。谷丰等[32]探索了一种基于颜色空间的动态目标识别和跟踪方法,实现空地机器人协作的目标检测和运动跟踪。
2.2 充当传感器的UAVs和充当辅助设备的UGVs
UAV可以在一些关键、感兴趣区域盘旋或在低空中飞行,进行更近距离的测量。这意味着具有高机动性的小型UAV(例如,四旋翼UAV等)能够进行更准确的检测。然而,小型UAV的有限飞行时间意味着其在大规模环境下很难完成任务,UGV作为一个中大型移动设备,可以弥补UAV在飞行时間上的劣势,使其能够在更大范围内收集数据,仅仅在电量预警时返回UGV平台进行电量补充即可。
美国陆军作战能力发展司令部陆军研究实验室的工作人员利用该想法进行了相应实验,并指出空地协作能够在遥远而危险的环境中执行搜救任务,但需要各种定位和通信基础设施。在搜救任务中,由于UAV的机载GPS不可靠且容易受到干扰,UAV无法依靠GPS进行导航。在没有士兵干预的情况下执行任务,UAV所需的一项关键功能是能够自主降落在静止或移动的UGV上进行充电,然后起飞执行新任务。因此,基于UAV视觉-惯性测距法的定位技术应运而生,同时专门为此应用和机载行为与控制设计独特的车顶标记。所有计算均是在具有较大计算限制的小型UAV上完成的。该项研究的独特之处在于,利用机载计算能力,在无GPS辅助的情况下,在户外实地演示了UAV自主着陆于UGV上的操作。其中,UGV顶部使用了专门为UAV着陆任务而设计的自定义标记,该标记通过大标记中包含小标记,即使机载相机非常接近标记,也可以捕捉到,如图5所示。
类似的,民用应用中以多旋翼为代表的空地协作系统经常被部署在关键基础设施的检查上,如精准农业、目标检测和电力检查等。TOKEKAR等[33]建立了一个用于精准农业的空地协作数据采集系统,该系统使用UAV执行监测任务,由于能量有限,UGV用于UAV的电力补充。ROPERO等[34]介绍了一种混合空地系统,旨在监测到分布在勘探区域的一组目标点。ZHU等[35]建立了一种电子巡逻系统,包括巡航车辆与空地协作系统间的通信、探测和指挥控制网络。基于对空地协作系统面临问题的分析,他们建立了一个模型来评估这种协同巡航的有效性。LI等[36]构建了空地协同系统,利用UAV视觉得到的环境地图,增强UGV识别环境信息能力,并提出了一种结合局部优化与基因算法的混合型路径优化方法。赵津团队[37-39]也进行了在空地协同下利用无人机视觉对地面目标、障碍物等进行识别、特征匹配、分类等工作,建立可通行地图,在此基础上,无人车开展全局路径规划及运动控制等相关研究。
上述研究仅考虑了UGV单独辅助一架UAV,无法同时为分在不同区域的多个目标服务。文献[40-41]采用了多UAV平行服务于多目标,这样可以显著提高效率并扩大服务范围。HU等[42]提出用一辆载有多UAV的UGV在指定目标区域内执行任务。
3 空地协作在未来的挑战
UAV和UGV在动力学、速度、通信等方面的巨大异质性和互补性,使空地协作系统能够高效地完成任务。这些优势比拥有一个强大且复杂的同构机器人完成同一任务的性能更好。在广泛采用多机器人系统过程中,关键的进展是为协作系统嵌入更多的智能,设计并开发新的分布式框架及感知和控制算法的结合。然而,这也增加了设计过程的复杂性,在能够执行复杂任务的空地协作系统被部署之前,学术界仍然面临许多挑战。本节将从以下三个方面讨论空地协作系统在未来的挑战。
3.1 空地协作系统的实时性
空地协作系统的某些应用需要实时响应,因此在计算能力上应该合理分配。由于尺寸和重量的限制,UAV/UGV的计算能力通常是有限的;而且带宽较低、通信不稳定的影响以及最低延迟的要求,导致可能无法实时加载计算数据。随着机器人数量的增加,UGV和UAV之间的大量互动增加了计算成本,紧耦合协作的任务加重了计算负担。机器人之间要进行大量的通信和数据交换,这就为开发高效嵌入式硬件技术的研究人员提出了更大的挑战。
3.2 空地协作系统的任务建模
任务场景的建模是空地协作系统的根本。根据任务目标,依据需求在多个抽象层次上进行建模来支持空地协作完成任务。对当前模型进行分析,可以重新提炼关于任务实现方式、任务相关性等进一步的研究方法。然而,目前大多数研究主要是要求开发人员对任务进行手动分类、建模。为了帮助空地协作系统在不确定条件中完成复杂任务,任务建模的步骤应该随着条件的变化自动调整,其中会涉及到最优理论、信息论等领域。
3.3 空地协作系统的人机交互
空地协作系统在执行任务时与人类互动是必要的。人类的参与可以将必要的干预传递给个别机器人或编队,以便与其他设备一起执行任务。该类系统的好处包括提高空地协作系统的任务性能,提高系统的适应性和对环境随机性的鲁棒能力。因此,在一个特定场景中,确定“人在环”是一种必要的责任和安全保障。
4 總结与展望
UAV和UGV之间的协作吸引了越来越多的关注,本文系统地回顾了UAV/UGV空地协作系统的成果与进展,基于相关文献的研究,对UAV/UGV空地协作系统进行了相应分类,并提出可能的问题与挑战。
1)介绍UAV/UGV空地协作系统的设备类型,并对任务类型、衡量标准、应用场境,以及二者的异质性和互补性做出描述;
2)归纳UAV/UGV空地协作系统中的两个关键功能角色——执行设备和辅助设备,进行对应分类,这些功能角色之间的密切配合能有效提高UAV和UGV的工作效率;
3)从空地协作系统的实时性、任务建模和人机交互角度阐述了该类异构机器人未来可能存在的挑战并提出相应见解。
尽管空地协作等异构机器人课题一直受到强烈关注,但在现实世界的部署中,空地协作仍然存在很多局限性,在系统层面、多代理控制及算法角度等方面仍然存在挑战。
参考文献:
[1]INGRAND F, GHALLAB M. Deliberation for autonomous robots: a survey[J]. Artificial Intelligence, 2017, 247: 10-44.
[2] DENG C J, LIU G M, QU F C, et al. Survey of important issues in multi unmanned aerial vehicles imaging system Indian commercial banks[J]. International Journal of Software & Hardware Research in Engineering, 2018, 6: 28-38.
[3] SHAKHATREH H, SAWALMEH A, AL-FUQAHA A, et al. Unmanned aerial vehicles: a survey on civil applications and key research challenges[J]. IEEE Access, 2018, 7: 48572-48634.
[4] MEHMOOD S, AHMED S, KRISTENSEN A S, et al. Multi criteria decision analysis (MCDA) of unmanned aerial vehicles (UAVS) as a part of standard response to emergencies[J]. International Journal of Innovative Technology and Exploring Engineering (IJITEE), 2018, 8(2s2): 79-85.
[5] MIDDLETON W T, MILLER G, POLLMAN A. Cooperative unmanned, air-ground vehicle search and rescue exercise[C]// Military Operations Research Society 86th Symposium. USA: Military Operations Research Society, 2018: 2-16.
[6] LI X Q, ZHANG Y, LUO H, et al. Analysis of new modes of environmental monitoring and environmental monitoring operation[J]. Environment and Development, 2019, 31(2): 187-188.
[7] HAYAT S, YANMAZ E, MUZAFFAR R. Survey on unmanned aerial vehicle networks for civil applications: a communications viewpoint[J]. IEEE Communications Surveys & Tutorials, 2016, 18(4): 2624-2661.
[8] SAKAI S, IIDA M, OSUKA K, et al. Design and control of a heavy material handling manipulator for agricultural robots[J]. 2008, 25(3): 189-204.
[9] SIEGWART R, NOURBAKHSH I R. Introduction to autonomous mobile robots[J]. Industrial Robot, 2004, 2(6): 645-649.
[10]WANG K, YIJIE K E, CHEN B M. Autonomous reconfigurable hybrid tail-sitter UAV U-Lion[J]. Science China Information Sciences, 2017(3): 1-16.
[11]RUAN W Y, DUAN H B. Multi-UAV obstacle avoidance control via multi-objective social learning pigeon-inspired optimization[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(5): 740-748.
[12]WANG T M, ZHANG Y C, LIANG J H, et al. Multi UAV collaborative system with a feature fast matching algorithm[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21(12): 1695-1712.
[13]LAZNA T, GABRLIK P, JILEK T, et al. Cooperation between an unmanned aerial vehicle and an unmanned ground vehicle in highly accurate localization of gamma radiation hotspots[J]. International Journal of Advanced Robotic Systems, 2018, 15(1): 1-16.
[14]COUNCIL N R. Technology Development for Army Unmanned Ground Vehicles[M]. Washington, D. C: The National Academy Press, 2003.
[15]HU C, WANG Y X, WANG R, et al. An improved radar detection and tracking method for small UAV under clutter environment[J]. Science China, 2019, 62(2):240-242.
[16]STRENTZ T, KELLEY A, HERMAN H, et al. Integrated air/ground vehicle system for semi-autonomous off-road navigation[C]//AUVSI Symposium.[S.l.:s.n.], 2002: 1-15.
[17]SAMPEDRO C, RODRIGUEZ-RAMOS A, BAVLE H, et al. A fully-autonomous aerial robot for search and rescue applications in indoor environments using learning-based techniques[J]. Journal of Intelligent & Robotic Systems, 2019, 95(2):601-627.
[18]RAO R, KUMAR V, TAYLOR C. Visual serving of a UGV from a UAV using differential flatness[C]//Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453). Las Vegas, NV, USA: IEEE, 2003: 743-748.
[19]SOFMAN B, BAGNELL J A, STENTZ A, et al. Terrain classification from aerial data to support ground vehicle navigation[Z/OL].[2021-10-10].http://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=10B0B8ACB40F
B77DE036BD51DA8F4913?doi=10.1.1.71.1104&rep=rep1&type=pdf.
[20]HECKMAN N, LALONDE J F, VANDAPEL N, et al. Potential negative obstacle detection by occlusion labeling[C]// IEEE/RSJ International Conference on Intelligent Robots & Systems. USA: IEEE, 2007: 2168-2173.
[21]BEZZO N, GRIFFIN B, CRUZ P, et al. A cooperative heterogeneous mobile wireless mechatronic system[J]. IEEE/ASME Transactions on Mechatronics, 2014, 19(1):20-31.
[22]KLODT L, KHODAVERDIAN S, WILLERT V. Motion control for UAV-UGV cooperation with visibility constraint[C]// 2015 IEEE Conference on Control Applications (CCA). USA: IEEE, 2015: 1376-1385.
[23]DING Y L, XIN B, CHEN J. Precedence-constrained path planning of messenger UAV for air-ground coordination[J]. Control Theory and Technology, 2019, 17(1): 13-23.
[24]DING Y L, XIN B, CHEN J, et al. Path planning of messenger UAV in air-ground coordination[J]. IFAC-PapersOnLine, 2017, 50(1): 8045-8051.
[25]KELLY A, RANDER P, HERMAN H, et al. Real-Time, Multi-Perspective Perception for Unmanned Ground Vehicles[D]. USA: Carnegie Mellon University, 2003.
[26]VANDAPEL N, DONAMUKKALA R R, HEBERT M. Unmanned ground vehicle navigation using aerial ladar data[J]. The International Journal of Robotics Research, 2006, 25(1): 31-51.
[27] KSLIN R, FANKHAUSER P, STUMM E, et al. Collaborative localization of aerial and ground robots through elevation maps[C]// 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). Lausanne, Switzerland: IEEE, 2016.
[28]ZHANG S, WANG H, HE S, et al. An autonomous air-ground cooperative field surveillance system with quadrotor UAV and unmanned ATV robots[C]// 2018 IEEE 8th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER). USA: IEEE, 2018: 284-290.
[29]PETERSON J, CHAUDHRY H, ABDELATTY K, et al. Online aerial terrain mapping for ground robot navigation[J]. Sensors, 2018, 18(2):630.
[30]JIN H K, KWON J W, SEO J. Multi-UAV-based stereo vision system without GPS for ground obstacle mapping to assist path planning of UGV[J]. Electronics Letters, 2014, 50(20): 1431-1432.
[31]王安青. 面向空-地機器人协作的环境感知与闭环检测[D]. 大连: 大连理工大学, 2016.
[32]谷丰, 王争, 宋琦, 等. 空地机器人协作导航方法与实验研究[J]. 中国科学技术大学学报, 2012,42(5):398-404.
[33]TOKEKAR P, HOOK J V, MULLA D, et al. Sensor planning for a symbiotic UAV and UGV system for precision agriculture[J]. IEEE Transactions on Robotics, 2016, 32(6): 1498-1511.
[34]ROPERO F, MUNOZ P, MD R-Moreno. TERRA: a path planning algorithm for cooperative UGV-UAV exploration[J]. Engineering Applications of Artificial Intelligence, 2019, 78(2): 260-272.
[35]ZHU M, WEN Y Q. Design and analysis of collaborative unmanned surface-Aerial vehicle cruise systems[J]. Journal of Advanced Transportation, 2019(1): 107-116.
[36]LI J, DENG G, LUO C, et al. A hybrid path planning method in unmanned air/ground vehicle (UAV/UGV) cooperative systems[J]. IEEE Transactions on Vehicular Technology, 2016, 65(12): 9585-9596.
[37]席阿行, 赵津, 周滔, 等. UAV/UGV协同环境下的目标识别与全局路径规划研究[J]. 电子技术应用, 2019, 45(1): 5-9.
[38]HU Q X, ZHAO J, LEI H. Cooperative path planning for intelligent vehicle using unmanned air and ground vehicles[C]// Chinese Intelligent Systems Conference. China: Chinese society of artificial intelligence, 2018: 603-611.
[39]周滔, 趙津, 胡秋霞,等. 复杂环境下移动机器人全局路径规划与跟踪[J]. 计算机工程, 2018, 44(12): 214-220.
[40]PENG K, LIU W D, SUN Q G, et al. Wide-area vehicle-drone cooperative sensing: opportunities and approaches[J]. IEEE Access, 2019, 7: 1818-1828.
[41]HU M L, LIU W D, PENG K, et al. Joint routing and scheduling for vehicle-assisted multi-drone surveillance[J]. IEEE Internet of Things Journal, 2018, 6 (2):1781-1790.
[42]HU M L, LIU W D, LU J Q, et al. On the joint design of routing and scheduling for Vehicle-Assisted Multi-UAV inspection[J]. Future Generation Computer Systems, 2019, 94: 214-223.
(责任编辑:周晓南)
赵津,男,1973年生,博士,教授,博士生导师,现任现代制造技术教育部重点实验室常务副主任,教育部评估中心工程教育认证专家,贵州省省管专家,贵州省优秀青年科技人才,获贵州省普通本科高校“金师”,贵州省优秀教师等称号。长期从事智能网联汽车,新能源汽车等领域研究。已承担了国家自然科学基金,贵州省重大科技专项,企业横向课题多项。发表论文80余篇,获贵州省科技进步二等奖一项,贵州省研究生教学成果特等奖,贵州省高等教育教学成果一等奖等。
通讯作者:赵 津,E-mail:zhaoj@ gzu.edu.cn.
A Review of Air-ground Collaborative Robots Research
ZHAO Jin LIU Chang
(1.Key Laboratory of Advanced Manufacturing Technology, Ministry of Education, Guizhou University, Guiyang 550025, China;
2.School of Mechanical Engineering, Guizhou University, Guiyang 550025, China)
Abstract: Air-ground collaboration is a hot spot in the field of multi-intelligent research nowadays, which has characteristics of wide-area coverage, high environmental adaptability, and high task execution rate. Compared with a single-intelligent system, multi-intelligent collaboration highlights greater data matching, free collaboration, and a higher degree of system redundancy, which can be widely used in multiple domains. At the same time, the functional complementarity of heterogeneous multi-robot can be fully utilized to form a cross-domain collaborative system to implement task collaboration and information sharing, which essentially improves its perceptive capability, execution capability, and efficiency in the operation of a complex environment and task planning. Therefore, the organic coordination and cross-domain collaboration of multi-intelligent will lead to the new paradigm of future robotics and applications. This paper provides an overview of air-ground collaboration, i.e., unmanned ground vehicle (UGV) and unmanned aerial vehicle (UAV) collaboration as the research targets, we analyze the device type of air-ground collaboration systems and describe the task types, metrics, environments faced, role functions and collaboration models of air-ground collaboration, while we explore the capabilities of sensing, decision-making, and task execution under heterogeneous robotic platforms, and provide insights into the current potential improvements and challenges of air-ground systems in the future.
Key words: multi-domain cooperation; multi-intelligence; air-ground collaboration; mission planning
