三维激光云扫描技术在变电站电气设备识别中的应用 ①
2021-01-13任佳依刘晓波栗志元
王 菲, 王 球, 任佳依, 刘晓波, 刘 浩, 栗志元
(1.国网江苏省电力有限公司经济技术研究院,江苏 南京 210000;2.北京博超时代软件有限公司,北京 102206)
0 引 言
相较于其他工业领域,目前普遍采用的先进测绘仪器在变电站模型重构中的实际应用并不良好,尤其在变电站某些特殊运行环境中无法正常作业,且实际中仍多以人工识别的方式获取变电站电气设备的外廓、位置、姿态等数据,进而完成变电站数字重构。存在的问题简述如下[1]:
(1)变电站的占地面积相对较广,诸多主要设备的外廓、尺寸、安装位置、姿态均存在明显差异,且分布在变电站内的各个区域,识别过程中存在较大难度。
(2)诸如电力线路、基座、穿墙套管等附属设施较多,其尺寸、外形、位置、姿态也存在较大差异,进行变电站重构时可能会对主要设备产生影响。
(3)测绘仪器采集角度的不同,导致变电站电气设备可能遭受不同程度的障碍物遮挡,不利于精准测绘。
(4)人工方式获取设备的外形、位置、姿态等会出现不同程度的误差,效率较低。
所以,需要寻找更加快速、精确、高效的变电站电气设备数字重构方法,既降低人工识别方式的工作量,又能够提升识别精度与识别效率。
基于此,采用三维激光扫描仪获取非接触式的变电站电气设备点云数据,对三维点云数据进行预处理后提取变电站电气设备的特征量,应用先进算法对其进行数字重构,进而实现变电站电气设备的自动划分与精准识别,为变电站三维数字重构提供有效保证。
1 变电站电气设备三维点云数据的获取及预处理
变电站电气设备三维数字重构与识别的流程如图1所示。
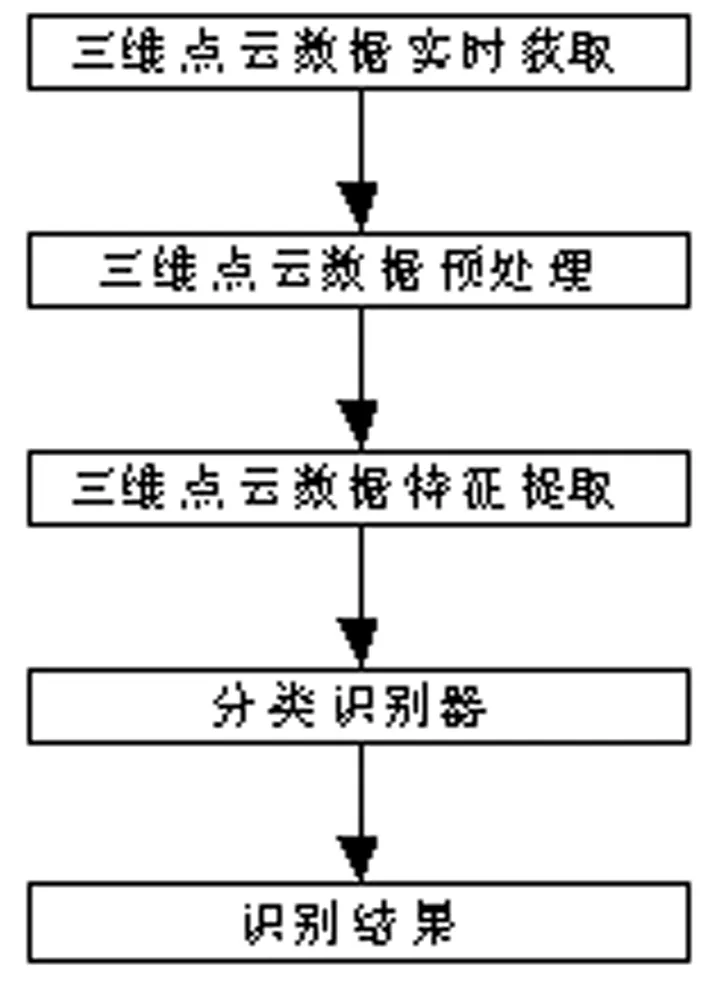
图1 变电站电气设备分类识别流程
由图1可知:变电站电气设备三维重构与识别主要有三维点云数据获取、点云数据预处理、特征量提取、分类识别等主要阶段。
其中,三维点云数据获取主要采用地面激光雷达扫描系统,该系统主要包含三维激光扫描仪、相机、旋转平台、后台PC及相关辅助系统共同构成,通过激光脉冲信号对待扫描物体进行旋转扫描,利用探测器接收反射后的激光脉冲信号,并利用控制系统对反射后的信号进行记录、存储、最终获得实时扫描后的三维点云数据[2]。在此基础上,对三维点云数据进行配准、合并、派生、排序、分割、精简、去噪等点云数据预处理。
2 变电站电气设备特征提取
描述变电站电气设备的主要特征有长度、宽度、高度、体积、投影密度等参数。在此基础上,本文采用投影边界曲率、三维点云法向量、三维点云灰度、设备投影面积直方图等描述变电站电气设备特征。
2.1 投影边界曲率
根据工程需要,本文选用三角网格法提取点云边界点。曲率表征平面或者是空间曲面的曲线弯曲程度。本文在得到平面点云边界点云集的基础上,采用距离累积描述变电站电气设备的投影边界曲率。距离累积的判断矩阵如式(1)。
(1)
式(1)中,i,j,L,x,y分别表示某段曲线的前端点、后端点、前端点与后端点之间所取的L个点、x坐标、y坐标。
其中
(2)
式(2)中,sgn(i,j,L)表征某个点到曲线的距离Di,j(如式(3))。
(3)
得到计算点与曲线的所有距离和,如式(4)。
(4)
2.2 三维点云法向量
本文采用以K-L变换为基础的主元成分分析(Principal Component Analysis,PCA)获取三维点云法向量[5]。首先,以K-L为基础,寻找K点的邻域点云集,然后,采用Delaunay球法求取邻域点云集的平面法向量。通常,可以采用近似平面法向量代替点云集法向量,即基于最小二乘求取点K的临近点的拟合平面(如式(5))。
(5)
式(5)中,d,n分别表示p到坐原点的距离、点云平面集法向量。
2.3 三维点云灰度
三维点云灰度提取的基本思路是:首先,获取三维点云集X,Y,Z三个轴向的最大值、最小值,然后对其进行水平方向的投影处理,接着根据最大值、最小值进行水平方向的网格划分,网格间隔为GSD,如式(6)。
(6)
式(6)表示三维点云灰度与网格平面距离、点云集密度以及高程差异等有关。
2.4 设备投影面积直方图
本文采用三角网格剖分算法提取变电站电气设备的投影面积,即在应用三角网格法获取三维点云集的基础上,计算三角网格的面积,并对其进行不同分层的投影面积计算,从而得到变电站电气设备在每一层上的投影面积。
3 变电站电气设备分类识别
分类识别是指从时间信息或者是空间信息中将属于目标的主要特征提取出来,对其进行机器学习并完成统计的过程。
3.1 设定目标特征
变电站环境相对特殊,考虑识别目标的位置不同、有无障碍物遮挡、有无设备相互交叉等因素,本文基于激光脉冲反射强度、空间位置以及三维点云统计特征给出复合特征,如表1。
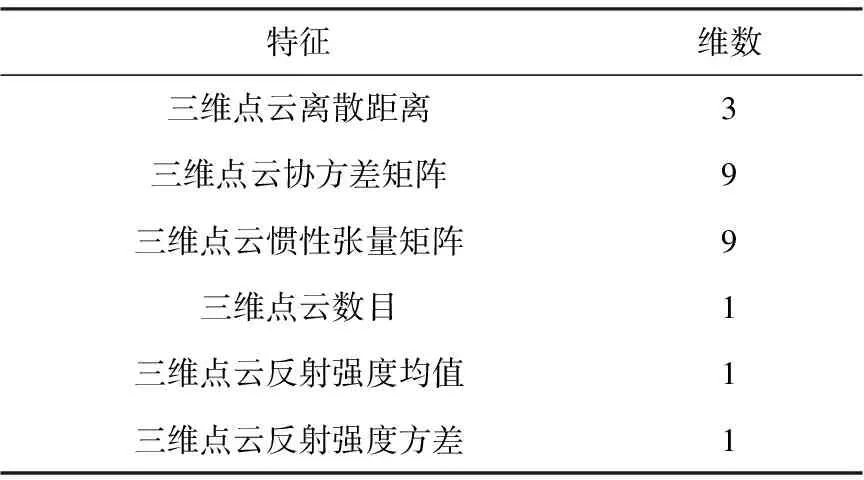
表1 复合目标特征
由表1可知,统计信息主要包括三维点云集内的点云数目、点云离散距离、点云协方差矩阵及其特征值、点云惯性张量矩阵及其特征值。其中,点云离散距离主要描述边界点云的偏离程度;协方差主要描述点云在X,Y,Z方向上的相关性;惯性张量主要描述点云的整体稳定性,即去噪能力。
3.2 点云数据关联分析
本文采用模糊聚类与信息熵的改进算法,变常规数据关联算法的寻求最优为寻求次优,即:首先,对三维点云数据进行模糊聚类分析,将点云数据归纳为最接近目标估计值的中心类数据,然后根据信息熵极大值原理,将点云数据关联分析转化为求取条件极值的聚类问题,也就是信息熵概率极大时,其对应的概率分布越接近于最真实的值。
设:t时刻,点云数据集为zj,存在c个目标,则期望值与实际值之间的差异代价函数为:
(7)
依据信息熵的相关理论,引入熵H(μji)。当H(μji)最大时,表示点云数据的概率分布最大。
(8)
引入拉格朗日系数λj,ηj,应用拉格朗日函数判断H(μji)最大时zj与ci的隶属度如式(9)。
(9)
则某个点云数据j与目标值i之间的概率pji可以用μji表示。

3.3 基于SVM与Adaboost 算法的目标识别算法
Adaboost 算法是基于统计理论的机器学习算法,在每一次迭代学习中产生一个弱分类器,将最终的若干个弱分类器进行线性加权便可得到强分类器。但是,在实际应用中,Adaboost 算法因其框架式的特点,使得其在高维复杂环境中的计算精度下降,且极易受到噪声干扰,因此本文采用SVM分类器对其改进,步骤如下。
(3)样本权重更新。对于分类错误的样本,令其权重为
(10)
其中,Zt为归一化系数。
(11)
(4)当所有迭代训练全部完成后,得到基于SVM与Adaboost 算法的强分类器H(X)[10]。
(12)
如此,基于SVM改进的Adaboost 算法提升高维复杂应用环境与非线性下的分类能力。
4 变电站电气设备识别仿真实验及结果分析
以某变电站为例,选取主要电气设备共计244个样本,并根据设备外形的不同,分为11类。在进行仿真实验的过程中,选取训练样本174个,测试样本50个。变电站电气设备识别流程如图2所示。
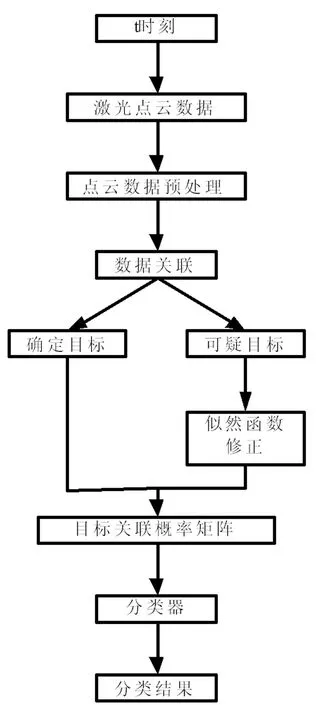
图2 改进后的识别流程
经过预处理与特征量提取,变电站电气设备的点云数据如图4所示(以避雷器、变压器为例),对应的三维点云法向量如图5所示。根据图4、图5可见,不同电气设备的法向量与X轴、Z轴的夹角不尽相同。
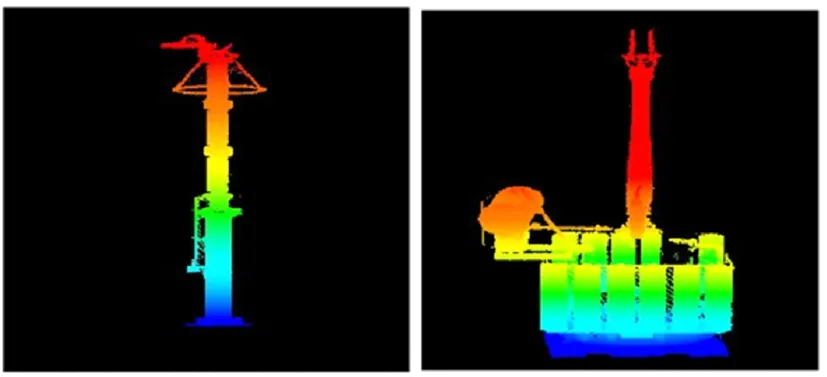
图3 变电站电气设备的点云数据可视化图形
经过数据关联分析以及基于SVM改进的Adaboost 算法的分类识别,其训练精度与测试精度如图6所示。
由此可见,应用模糊聚类与信息熵的数据关联分析以及基于SVM改进的Adaboost 算法的分类识别对于变电站电气设备的识别精度有着很大提升。经过改进后的方案,变电站电气设备的训练样本识别精度接近于1,测试样本的识别精度达到了98.16%。此外,根据多次仿真实验发现,设备投影面积对分类识别率的精度影响较大,而投影边界曲率对识别精度的影响较小,这说明变电站电气设备不同的外形、尺寸、位置、姿态会对识别结果产生很大影响。
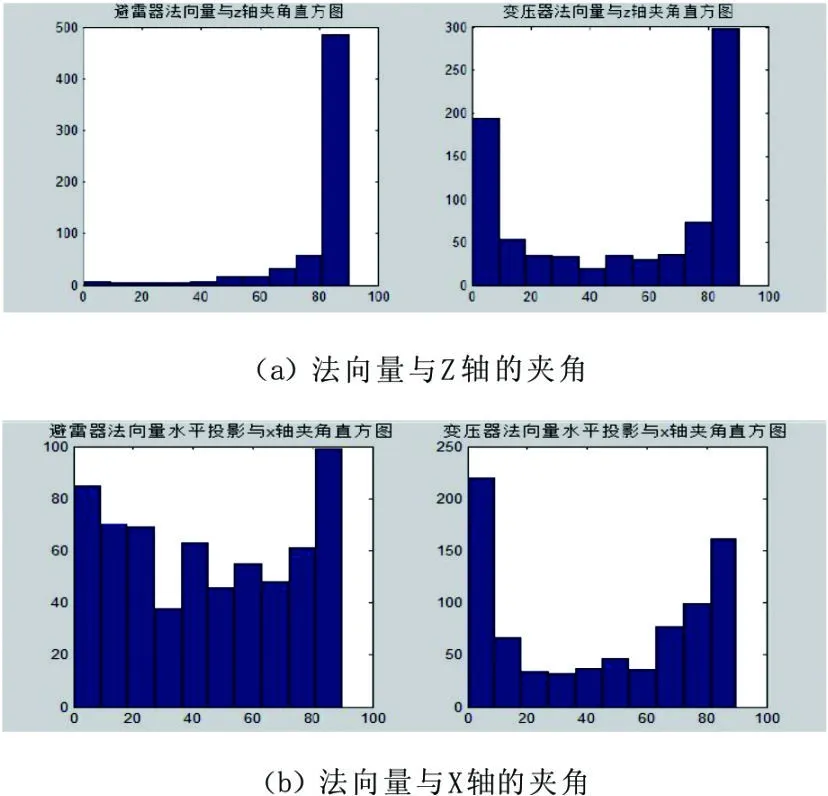
图4 点云数据预处理与特征量提取效果
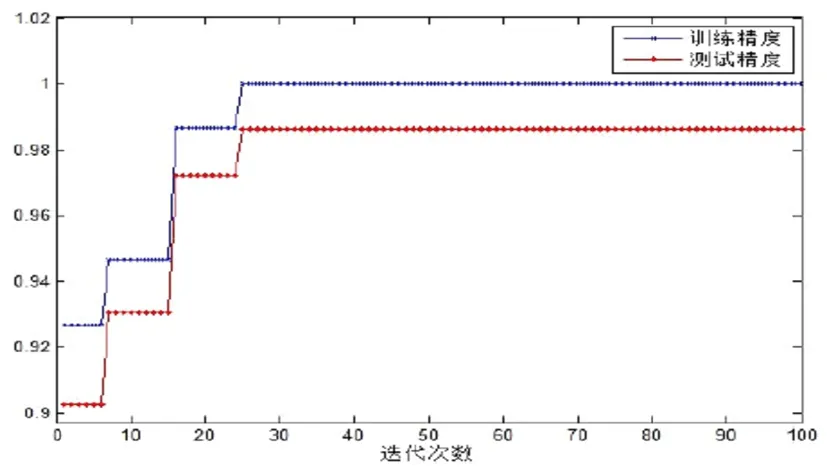
图5 迭代训练精度
5 结 语
有别于传统图像识别,三维激光云扫描技术具有很强的实时性。本文利用三维激光扫描系统获取变电站电气设备的实时三维点云数据,经过排序、精简、分割、去噪等数据预处理后,通过基于最大模糊信息熵的数据关联分析,以加强似然系数修正目标关联概率矩阵,获取最接近于真实值的数据聚类,然后将其送入基于SVM改进的Adaboost 算法分类器进行强分类识别。仿真结果表明,本文方案的训练精度、测试精度均高于98%,优于未改进的方案,且发现设备外形、位置、姿态会对识别结果产生影响,其中,设备投影面积对识别结果影响较大。
