一种翼身融合布局飞行器的偏离特性分析
2021-01-13付军泉史志伟周梦贝吴大卫潘立军
付军泉,史志伟,*,陈 杰,周梦贝,吴大卫,潘立军
(1.南京航空航天大学航空学院 非定常空气动力学与流动控制工信部重点实验室,南京 210016;2.中国商飞上海飞机设计研究院,上海 201210)
0 引 言
随着航空电子技术和控制技术的不断发展,以及对飞机燃油效率、碳排放和氮氧化物排放要求的不断提高,翼身融合飞行器因其高升阻比而成为代替传统飞行器的可行选择之一[1-3]。翼身融合飞行器具有较好的气动性能,但也面临各种挑战。例如多学科优化设计问题,配平、稳定性与操纵性问题等[4-8]。翼身融合飞行器的操稳特性及动态特性与常规飞机的差异,特别是翼身融合横航向稳定性与操纵性问题,对其极限飞行状态提出了更高要求。开展飞行器极限飞行状态研究,对于保证飞行安全、预防飞行事故具有有重要意义。
飞行器极限飞行状态包括失速、尾旋和偏离[9-11]。当飞行器在大迎角下飞行,可能出现自动急剧偏转、机翼摇摆或翼落、机头下沉、机头晃动或上仰等非指令现象。若不能及时纠正或改出,就会很快发展为难以控制的摇摆或滚转,以致进入尾旋。触发偏离的原因很多,其实质是飞行器气动力与惯性力组合的结果;对于与飞行器运动状态参数相关的气动力失稳引起的偏离,若能在设计初期就进行预测,就可以有效延缓或消除偏离[12-15]。
飞行器偏离特性的研究手段包括风洞试验、模型自由飞试验和全尺寸试飞试验。飞行试验虽然可靠度最高,但周期长、风险大、投入高[16-17]。因此,在飞行试验前,基于大量风洞试验数据和经验,发展了一系列稳定判据,如侧滑偏离判据、横向控制偏离参数、Weissman组合判据[18-20]等。而为了直接研究飞行器偏离的非线性动力学现象,在风洞中发展了单自由度释放试验及风洞虚拟飞行试验[21-22],能够填补常规风洞试验和大气飞行试验之间的空白、降低飞行试验风险、缩短研发周期,并可通过减少试验次数和试验设备耗费来降低试验经费。
本文针对某翼身融合布局飞行器,基于风洞静态测力试验,采用多种稳定性判据对其偏离特性进行分析,并通过风洞虚拟飞行试验加以验证。
1 试验模型及方法
常规测力试验在南京航空航天大学回流式低湍流度开口风洞中进行。该风洞开口试验段截面尺寸为1.5 m×1.0 m,长度为1.7 m,最大稳定风速25 m/s。试验模型几何参数见表1。试验时,模型采用尾撑方式(见图1),试验风速10 m/s,以Φ14六分量杆式天平测量气动力和力矩。
表1 试验模型几何参数Table 1 Geometric parameters of the test model
虚拟飞行试验在南京航空航天大学NH-2低速风洞中进行。该风洞试验段截面尺寸为3 m×2.5 m,最大稳定风速90 m/s。试验模型采用3D打印加工制作,安装微型舵机以实现对舵面的操控,在舵面旋转轴内端连接磁编码器测量偏角,控制器通过ADC采集即时舵偏角度。模型内嵌基于树莓派的机载飞行控制器,可实现信号采集、姿态估算、执行控制律和数据记录等功能。飞行器角速度通过飞行控制器内嵌高精度惯性传感器测量,并由扩展卡尔曼滤波器对姿态角(滚转、俯仰和偏航)进行估算。虚拟飞行试验模型及安装如图2所示。

图1 试验模型安装图Fig.1 Installation of the experimental model

图2 虚拟飞行试验模型Fig.2 The virtual flight test model
虚拟飞行试验模型与测力试验模型的尺寸比例为2∶1。图3给出了试验中飞行器机体的坐标定义,并标明舵面位置,各舵面的偏转角度均为±30°。虚拟飞行试验模型的几何参数见表2。

图3 虚拟飞行试验模型三视图Fig.3 Three views of the virtual flight test model
本文设计并制作了多轴承式三自由度释放机构。该机构可实现滚转和俯仰轴转动±60°、绕偏航轴的任意角度转动,如图4所示。模型还设有配重位置用于重心调节,保证自由度释放试验中重心位置与旋转中心基本重合。
表2 虚拟飞行试验模型几何参数Table 2 Geometric parameters of the virtual flight test model

图4 三自由度机构Fig.4 3 degree of freedom rig
试验中,为获得该BWB(Blended-Wing-Body)布局飞行器的偏离特性,通过地面控制中心向机载飞控系统发送俯仰指令,使飞行器模型缓慢抬头,直至出现偏离发散。该过程中,全程记录飞行器姿态角和角速度信息。
2 失速偏离特性研究
2.1 横航向静稳定性判据Clβ和Cnβ
横航向静稳定性是衡量飞行器受到扰动后能否恢复原始状态的关键,横航向静稳定导数随迎角变化的曲线可用来分析飞行器偏离特性。对于航向稳定性,当航向静稳定导数Cnβ>0,飞行器具有航向稳定性,受扰动后有自动恢复原航向的趋势;当Cnβ<0,则受扰动后飞行器会丧失航向稳定性,航向偏离发散。而对于横向稳定性,当横向静稳定导数Clβ<0,飞行器是横向静稳定的;当Clβ>0,飞行器可能发生非指令的滚转偏离。
图5为侧滑情况下,滚转力矩系数、偏航力矩系数与无侧滑情况下的对比曲线。将其转化为横航向稳定导数Clβ以及Cnβ,结果如图6所示。
由图6可以看出:横向稳定性导数Clβ在很小的迎角α=5°时就发生变号,由负值变为正值,出现横向不稳定;当迎角继续增大,其不稳定性也在加剧;直至32°迎角时,Clβ开始降低,并在37°迎角时,再次发生变号,Clβ由正值变为负值,重新恢复横向稳定性。而对于航向稳定性导数Cnβ,可以看出:当α≤28°时,航向都是静稳定的;在28°<α<38°时,飞行器失去航向稳定性;当α≥38°时,又恢复稳定性。
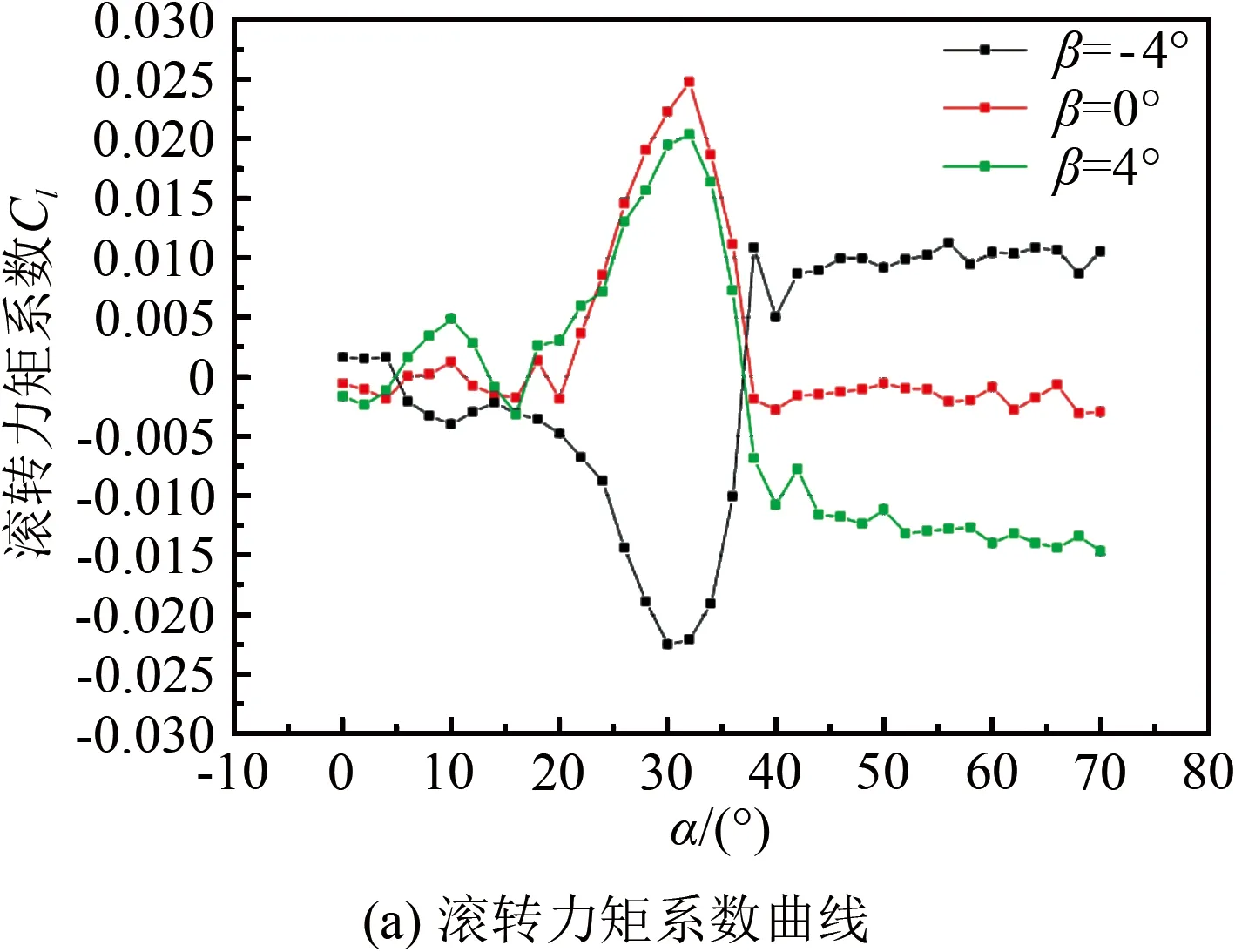
图5 横航向力矩系数曲线Fig.5 Roll and yaw moment coefficient curves
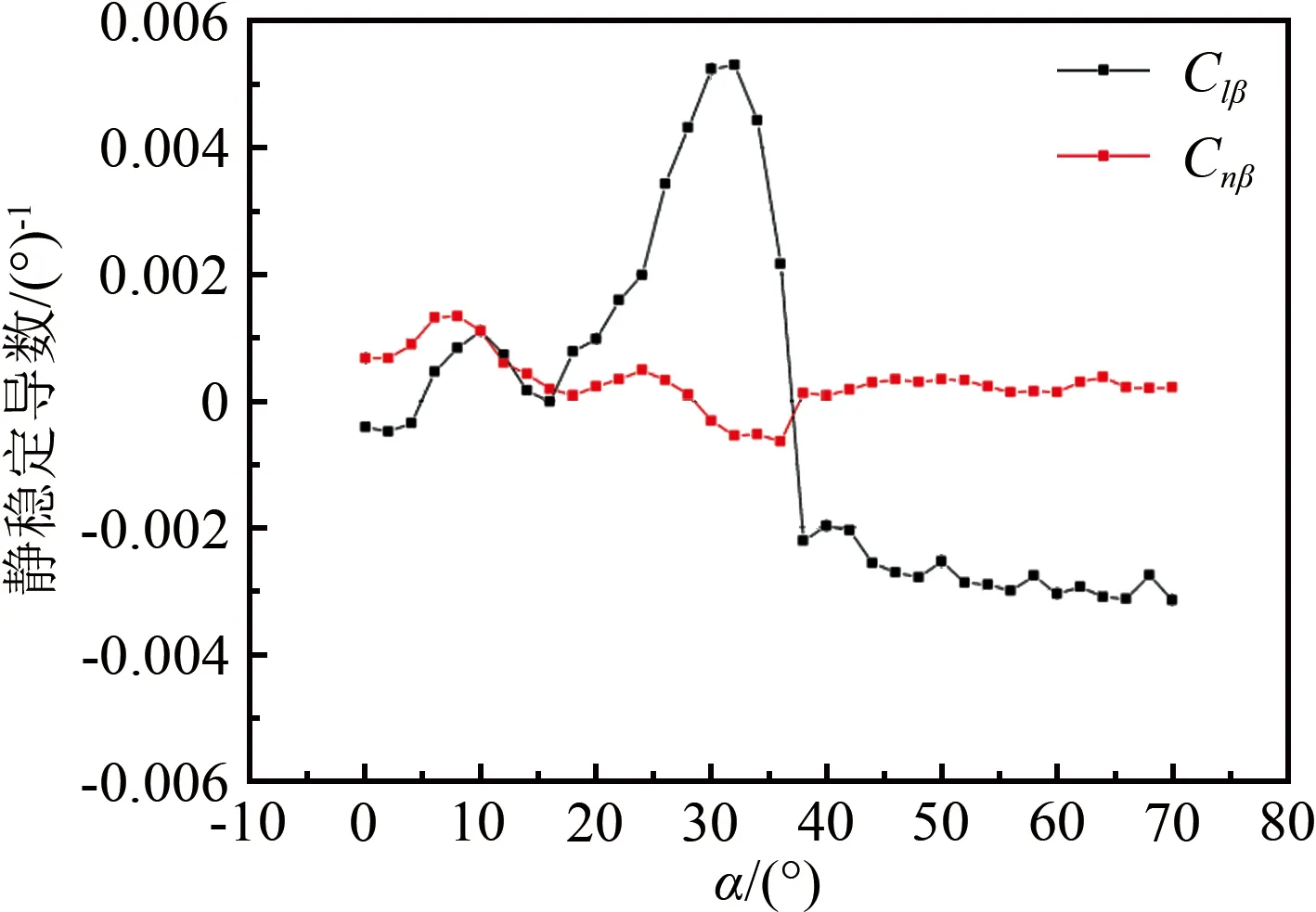
图6 横航向稳定性导数Fig.6 Directional and lateral stability derivatives
通过对横航向静稳定导数的分析,可以初步判断该BWB布局飞行器的横向静稳定性较差,在小迎角下即可能发生非指令的滚转发散;相对而言,航向稳定性较好,在28°~38°范围内可能出现侧向偏离。
2.2 侧滑偏离判据Cnβ,dyn
由于飞行器上反角和后掠角等外形参数对偏离特性存在影响,若仅使用横航向静稳定性导数作为偏离判据,将与飞行器的实际飞行状态有所不同。为研究这些可能出现的情况,可将动态航向稳定参数Cnβ,dyn作为侧滑偏离判据加以分析。侧滑偏离判据考虑了在副翼/方向舵中立时,不同迎角下,横航向稳定性导数和转动惯量对飞行器航向稳定性的综合影响,可以比较真实地反映偏离运动中飞行器的方向稳定情况。Cnβ,dyn的表达式如下:
其中,Ix和Iz分别为横向转动惯量和航向转动惯量。通常,当Cnβ,dyn>0时,认为飞行器不会发生偏航方向的发散。
图7为该BWB布局飞行器动态航向稳定参数Cnβ,dyn随迎角的变化曲线。可以看到:当16°<α<37°时,Cnβ,dyn<0,表明在该迎角范围内,飞行器对侧滑角的瞬时反应将使侧滑增大,飞行器发生偏离,更容易进入尾旋,尾旋敏感性也更强。
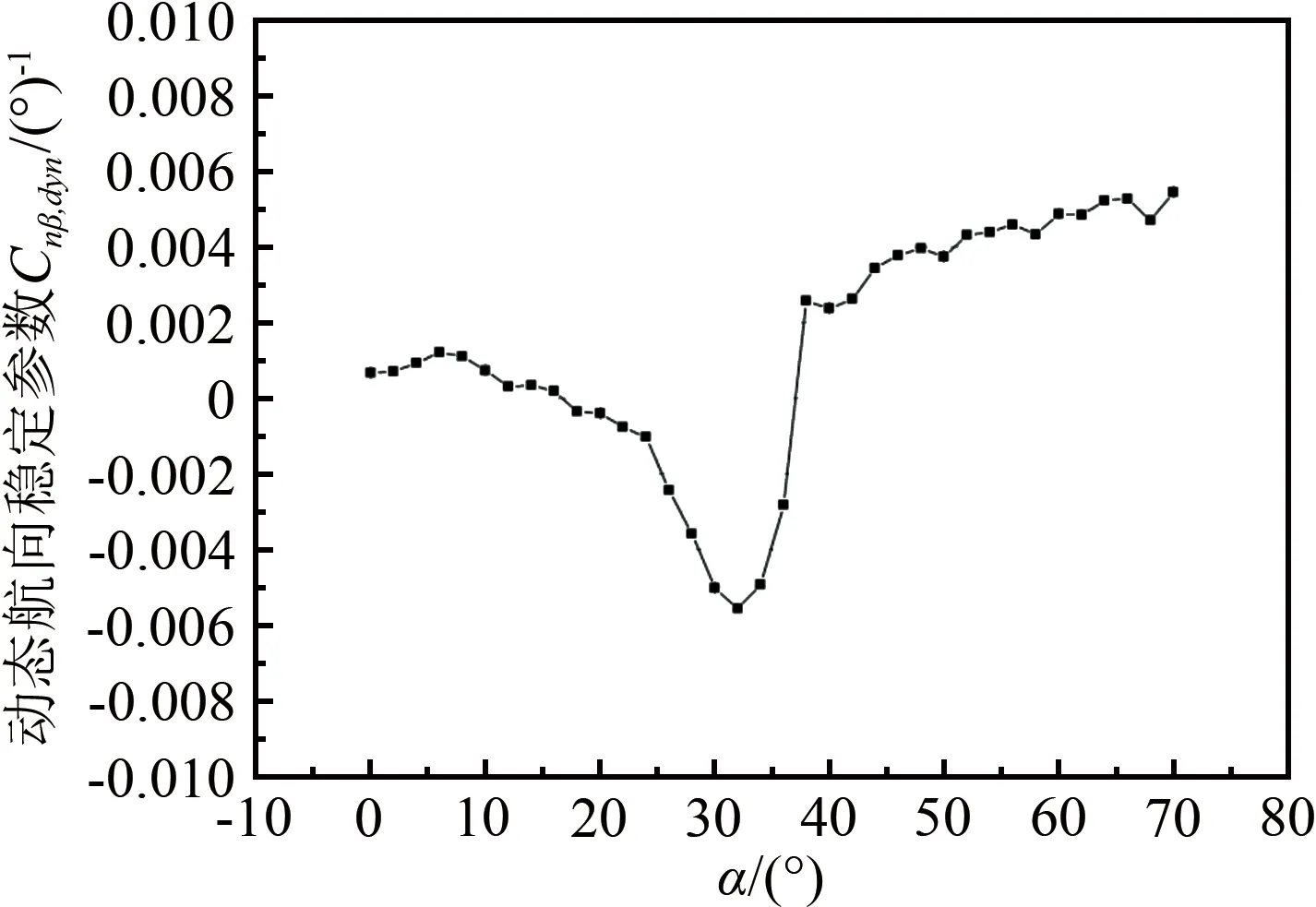
图7 动态航向稳定参数Cnβ,dynFig.7 Dynamic directional stability parameter
2.3 横向控制偏离参数LCDP
横向控制偏离参数LCDP引入了副翼操纵效率的影响,主要用于预测进行横向操纵时引起飞行器偏航发散的敏感程度。LCDP的定义如下:
式中,Cnδa为偏航力矩系数对副翼偏角的导数、Clδa为滚转力矩系数对副翼偏角的导数(即副翼操纵效率)。若LCDP>0,则横向操纵时有自动消除侧滑的趋势,飞行器航向稳定。图8给出了操纵导数Cnδa、Clδa曲线。
图9给出了横向控制偏离参数LCDP随迎角变化的曲线。当迎角α≤16°,LCDP大于零,飞行器是航向静稳定的;当16°<α<30°,LCDP小于零,飞行器失去航向静稳定性;当30°≤α≤36°,重新具有航向静稳定性;当α>36°,再次失去航向静稳定性。
2.4 Weissman组合判据
侧滑偏离判据Cnβ,dyn与横向控制偏离参数LCDP判据之间相互影响、相互制约,在单独使用时存在局限性。1972年,在大量实际飞行数据的基础上,Weissman经验性地将Cnβ,dyn与LCDP进行组合考虑,绘制了Weissman组合判据。之后Johnston等对其进行了修正,修正后的判据沿用至今。
图10为Weissman组合判据针对本文BWB布局飞行器的应用。图10(a)和(b)分别为迎角小于24°和迎角大于24°的参数分布图。
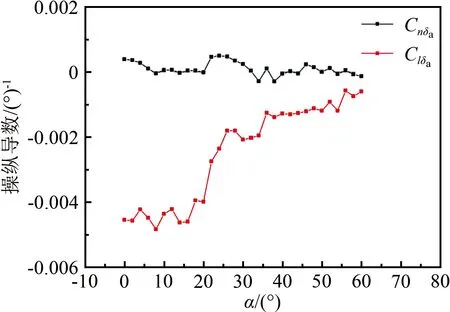
图8 操纵导数Fig.8 Control derivative
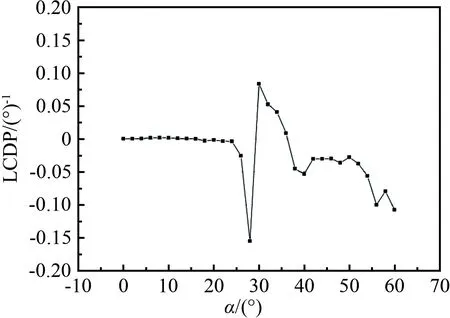
图9 横向控制偏离参数LCDPFig.9 Lateral control departure parameter
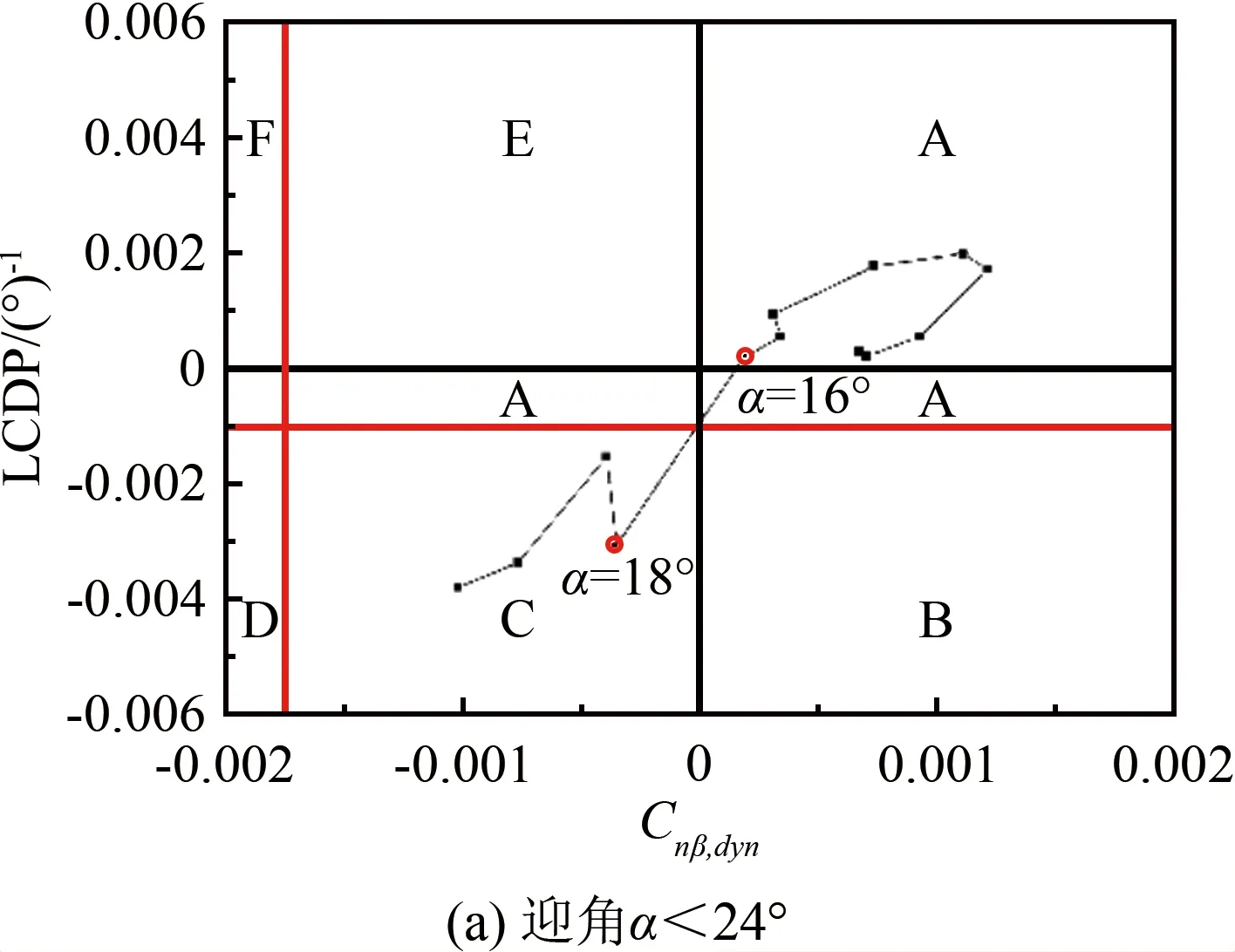
图10 WEISSMAN组合判据结果Fig.10 Weissman chart
图中,A区为无偏离区;B区为轻度偏离区,可能出现轻度滚转控制发散;C区为中度偏离区,可能出现轻度偏航发散,当加入滚转控制时会加剧发散;D区为强烈的偏离发散区,偏离发散和滚转控制发散都很明显;E区为中度偏航发散区,进行滚转控制能减弱发散趋势;F区为非常强烈的发散区,发散非常迅速。
由图10可以看出:在迎角16°~18°之间,曲线从A区(无偏离区)进入C区(中度偏离区),可能出现轻度的偏离发散;在迎角24°~26°之间,从C区进入D区(强烈偏离发散区);当迎角继续增大至30°,开始进入F区(非常强烈的发散区),发散变得非常迅速;迎角到达38°时,才从F区进入B区(轻度偏离区),可能出现轻微的滚转控制发散。
2.5 不同判据下偏离迎角对比
采用上述4种偏离判据对本文的BWB布局飞行器进行了稳定性分析,获得了不同判据下的失稳迎角,如表3所示。

表3 不同判据偏离迎角预测结果Table 3 Prediction results of different criteria
综上,该BWB布局飞行器的横向静稳定性较差,航向静稳定性较好。16°迎角之后,Clβ迅速增大,横向静不稳定性增加,是导致出现偏离的主要原因。根据Weissman组合判据,在迎角超过24°之后,可能出现非常强烈的发散,发散非常迅速;而在该迎角下,航向是静稳定的,横向的静不稳定度极大,滚转导致的侧滑使飞行器迅速偏离,导致飞行器的非指令运动。
3 风洞虚拟飞行试验验证
针对上述分析,采用风洞虚拟飞行试验技术对其结果进行验证。试验中,保持副翼与方向舵中立位置,缓慢拉动升降舵,使迎角缓慢增大。图11是试验中飞行器姿态角随时间的变化曲线及局部放大图。
从图11可以看出:随着升降舵舵偏角增大,飞行器俯仰角缓慢增大,此时偏航角基本保持在0°附近,而滚转角有轻微振荡(该振荡由风洞湍流度引起);而当俯仰角增大至5°左右,滚转角振荡幅值为5°,这与横向静稳定导数在5°迎角出现的不稳定性相对应;俯仰角在15°左右迅速增大,滚转角快速发散,偏航角也同时出现发散,这与前文以稳定性判据预测的16°偏离失速迎角基本一致。同时,从虚拟飞行试验结果也可以清楚地看出:迎角增大后、滚转角迅速发散,这是导致偏离的主要原因。虚拟飞行试验可以揭示飞行器的偏离现象,能够很好地验证飞行器稳定性判据预测结果,也为偏离问题提供了更加直接的研究手段。
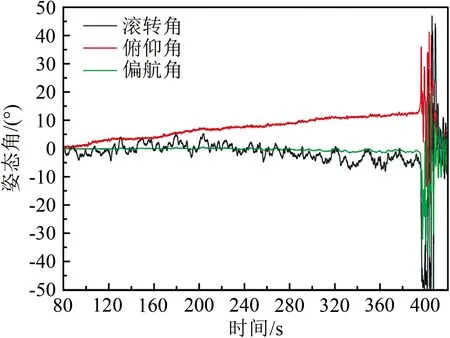
图11 姿态角随时间的变化曲线Fig.11 Attitude angle curve
4 结 论
本文利用一系列稳定性判据对BWB布局飞行器的失速偏离进行了分析,获得了飞行器的大致初始偏离迎角和偏离区域,并对其敏感区进行了预测。这些稳定性判据从不同侧面反映了BWB布局飞行器的偏离运动特性,有些判据仅包括横向参数或航向参数,有些则是耦合判据,包含横航向参数。因此,在进行飞行器偏离特性和尾旋敏感性分析时,应综合利用各种判据进行分析,预测飞行器的偏离特性和尾旋敏感性。
虚拟飞行试验技术与稳定性判据的相互验证,为虚拟飞行试验技术在飞行器偏离特性研究方面提供了可能。
