基于TDD协议的单载波频带靶机测控系统
2021-01-13杨柳庆孙丽慧肖前贵
杨柳庆 张 勇 孙丽慧 肖前贵
(1.南京航空航天大学无人机研究院,南京 210016;2.南京航空航天大学中小型无人机先进技术工业和信息化部重点实验室,南京 210016;3.航天工程大学士官学校航天战勤保障系,北京 102200)
1 引 言
靶机是靶用型无人机的简称。作为射击训练目标的的一种军用飞行器,靶机既可以模拟包括有人机、各类导弹等在内的航空飞行器的高度、速度和机动性等飞行性能,也可以模拟雷达反射特征和红外辐射特征等外部特性。除射击训练外,在空对空或地对空等防空武器系统的研制、性能测试等方面同样具有非常重要的作用。在部队和军事人员的战术技术指标考核和实战演习中也可完成相应任务[1,2]。
在整个无人机设计中,最为重要的就是设计无人飞行器的测量与控制系统。常规的测控系统主要由遥控和遥测两部分组成。遥控部分主要完成地面工作站对靶机传输信号指令的任务并同时承担飞行状态和机载设备工作状态的控制任务。遥测部分则主要负责将靶机的飞行状态、机载装备工作情况或其他预定信息实时传送至地面监测站,以此来实现监测站实时显示、储存和重检测靶机的飞行航迹和各参数的历史数据。储存的历史信息可为飞行试验过程及故障分析提供数据保障[3,4]。由于遥控和遥测部分功能相对独立且均为双向高速通信模式,因此无人机测控系统需处于全双工工作方式。
靶用型无人机是一种损耗性资源,执行任务即代表损耗,为达到低成本、小型化和通用化的要求,其测控系统应在保证可靠性的原则上,尽可能提高靶机的经济性。若靶机采用专业的测控系统,无疑增加了靶机的成本,并限制了通用性。为设计更具通用性的测控系统,采用工业级别的商用数传无线电台作为主要硬件。这种做法可以使各类靶机的测控系统通用化,从研发设计与硬件选购两方面均可以节约成本,非常迎合靶用无人机测控系统的需求[3]。同时,商用的数传电台在技术成熟、效率高、技术开发难度小等特点外,还具有通畅的原材料采购渠道。
2 系统概述
2.1 系统组成
地面站和机载测控终端是靶用型无人机的两个主要组成部分。这两部分均应包括一套以上用于无线通信的数传电台(含天线)。
靶用型无人机测控系统的工作示意图如图1所示。
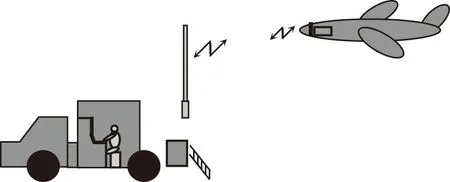
图1 靶用型无人机测控系统工作示意图Fig.1 Working diagram of target drone measurement and control system
组成接口包括:RS-232串口接口、遥控指令键盘接口、电源接口等,如图2所示。
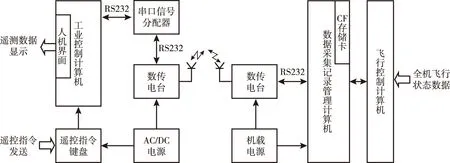
图2 靶用型无人机测控系统组成接口图Fig.2 Interface diagram of target drone measurement and control system
2.2 基本功能
靶用型无人机测控系统的基本功能有遥控功能,遥测功能和数据记录功能。
(1)遥控功能:测控系统的两大组成部分是地面站和安装在无人机上的测控终端,这两部分也是测控系统的通信双方,且实现通信的主要设备是两端内嵌的无线通信。遥控功能则主要指地面站一侧对无人机处的测控终端发送控制指令,测控终端不具备计算解析能力。所以测控终端还需将指令后转发给飞行控制计算器,整个流程就实现了遥控功能。
(2)遥测功能:遥测功能与遥控功能是对称而言的,测控终端将飞行控制器侦测到的遥测数据信息传输给地面站。地面站再以图像、视频等形式进行可视化显示,以方便测控人员进行数据分析,此流程即实现了遥测功能。
(3)数据记录功能:地面站依据程序或者监测人员的指示进行数据的存储,便于后期数据处理与回放。
3 全双工测控通信
按照传输方向进行分类,通信方式可分为单向传输和双向传输两种。双向传输又可分为三种,即全双工方式、半双工方式以及单工传输方式。其中,通信双方可以同时进行双向交流的传输方式即为全双工传输方式。在实时传输与双向传输的通信要求下,全双工是最为适用的。无线传输中的全双工的通信方式,有以频率进行数据收发的频分双工(Frequency Division Duplex,FDD)和时分双工(Time Division Duplex,TDD)两种模式[5]。
多数无人机的测控系统完成全双工通信依据的是FDD方式,FDD凡是采用两个相互分离的载波频带,在接收与发送两个方向实现各自通信。此外,为减少相互干扰[6~8],到达稳定工作的工程要求,需要在两个载波频带之间空出一定的频带间隔。目前,若靶用型无人机测控系统采用FDD方式,则依照原理,靶机和地面站必须分别配备两套以上载波频带不同的数传电台才能实现全双工通信,这显然不符合靶机的实际要求。
相对于FDD方式,TDD方式只需一个载波频带,对数据的接收和数据的发送配以不同的时间。当相互进行数据传输的双方进行信息交换时,可以确保在一方向外发送信息的同时,另一个通信方可以实时接收数据。然后双方交替传输方向,如同打乒乓球一样,也称该方法为“乒乓法”[9~11]。
本文采用在靶用型无人机测控系统接口层软件内构建TDD协议的方法,机载和地面站均配备一套数传电台,使系统在单载波频带的情况下,实现全双工测控通信,从而解决数据传输台之间通信的半双工转全双工的问题。
3.1 TDD协议的帧结构
TDD协议中通常采用三种帧结构:空闲突发帧、捕获突发帧和数据帧。空闲突发帧、捕获突发帧的字节个数均为3B,都是高速短帧的数据类型。数据帧的长度不确定,其包含通信双方传输的信息,所以其长度根据传输信息的大小进行自动调节。
3.2 TDD协议的帧同步
数传电台常以位每秒(bps)为单元的比特率进行发送和接收数据,帧结构中的数据单位是字节(B)。通信时如果要实现TDD底层协议的帧同步,就需要通过数据电台的MCU处理器进行控制。
TDD协议帧结构包括预码和同步码两个部分,两者各1个字节,由两个8bit的同步块信息构成。进行通信的接收者会使用8位的寄存器进行存储当前接收的4位信息和上次接收到的4位信息。接收者在每次接收到一个新的信息时就会进行循环位移操作。然后,将当前信息与预设的编码信息进行对比,若与预先设置的编码相匹配,则说明完成了位同步。之后,接收的一方继续接收单个字节信息,并将同步码进行匹配操作,如果两者相匹配,则说明完成了信息同步。接收数据信号的一方会采用计数器对帧数据同步的过程中进行移位操作的位数进行记录。相对于两者匹配的情况,若接收者收到的字节信息与同步码之间不匹配,则设定在等待时间内再额外添加两个字节的时间。延长等待时间后,若仍未接收到同步码则认定为伪同步。帧同步建立过程如图3所示。
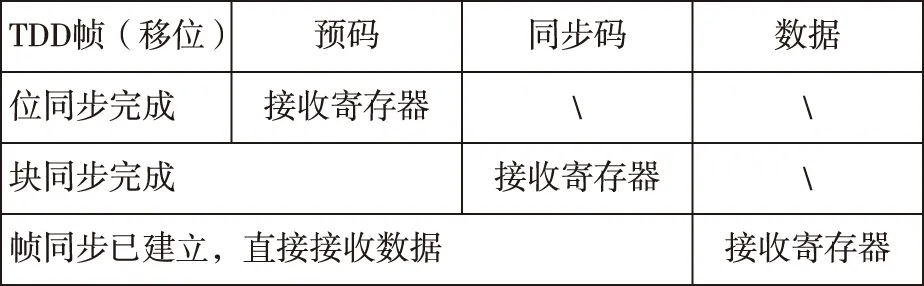
图3 TDD协议帧同步建立过程Fig.3 TDD protocol frame synchronization process
3.3 TDD通信协议实现
TDD通信协议实现包括:突发同步建立、数据传输和突发同步保护。整个通信过程实现由测控系统接口层软件控制。
3.3.1突发同步建立
采用TDD协议进行通信首先需要实现通信双方时间上的同步,以保证通信的可靠性。
当一方有发送请求时称为主机(地面站),另一方称为从机(机载测控终端)。对TDD协议进行初始化操作时,需要将地面控制站和机载测控终端都设置在处于接收状态,并且同时处于相同的一个载波频带上。当主机检测到从机发来的认证信号后,就从主机状态切换为从机状态,然后发送一个控制突发帧。当从机检测到主机发来的空闲突发帧,并且状态码中的发送者(源地址)和接收者(目的地址)匹配成功,则转为发送状态,并向主机发送一个认证空闲突发帧,启动从机的突发定时器。主机在收到从机的认证空闲突发帧的同时启动主机的突发定时器。这一过程完成后,通信双方就认定为突发同步并建立起来了通信链路。突发通信过程中,通信的主机和从机就可以在突发定时器控制下转换主从机收发状态。在实际通信过程中,通信双方会交替发、收数据,直至双方通信结束后关闭突发定时器,TDD协议突发同步建立过程如图4所示。
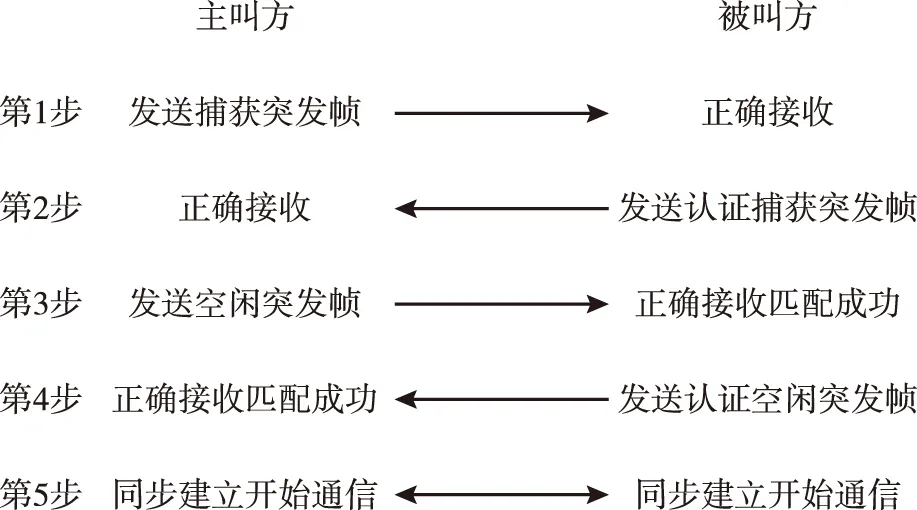
图4 TDD协议突发同步建立过程Fig.4 TDD protocol burst synchronization setup process
3.3.2TDD方式数据传输
在建立突发同步后,TDD方式的通信双方就可以在突发定时器的控制下交替配置,通过转换收发状态来完成双工通信。一个突发周期一般包括接收时隙、发送时隙和两个保护时隙,工作时序如图5所示。
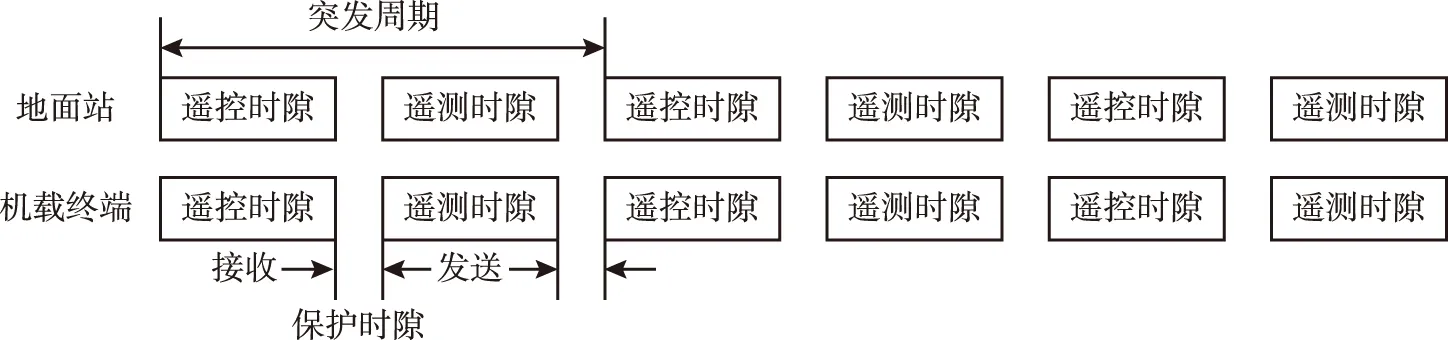
图5 TDD方式双工通信时序Fig.5 TDD mode duplex communication timing
依照突发周期的时间顺序可梳理如下:首先在遥控时隙内实现遥控功能,根据定义,地面站发送遥控数据帧给靶机的测控系统终端,完成对靶机的飞行控制;其次,在遥测时隙内完成遥测功能,根据定义即测控终端发送遥测数据帧给地面站,以上两个时隙内就完成了双向通信,通信时序如图6所示。
设计遥控时隙和遥测时隙时应当综合实际工程情况。时隙的长度应该要满足无线通信所需时间的最低要求。具体的参考指标为数据帧的长度和电台传输速率,特别的,还应当考虑设置一个保护时隙。原因是数传电台进行收发转换需要一定的时间,工程实践中一般为(5~20)ms,保护时隙应大于此工程要求。综上,一个突发周期T可表示为
T=Tk+Tc+2×Tb
(1)
式中:Tk——遥控时隙;Tc——遥测时隙;Tb——保护时隙。
由此也确定了测控系统遥控和遥测数据的刷新率f为
f=1/T
(2)
遥控数据和遥测数据的收发间隔可以分别自定义,遥控数据刷新率fk小于遥测数据刷新率fc,该类时间不对称的情况下就可在一个突发周期内设置n个Tc,则
T=Tk+n×Tc+(n+1)×Tb
(3)
靶用型无人机测控系统双工通道时序如图6所示。固定遥控刷新周期,刷新率为fk为
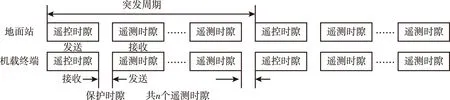
图6 靶机测控系统双工通信时序Fig.6 Target drone measurement and control duplex communication timing
fk=f=1/T
(4)
遥测刷新周期不固定,在每一个突发周期开始时有Tk+Tb的延迟,平均遥测刷新率fv为
fv=n×f=n/T
(5)
3.3.3突发同步保护
TDD方式数据传输过程中,通信双方依赖突发定时器来划分时隙,交替在各个工作时隙内发送和接收数据。因此定时器的误差会造成严重的影响,定时器一方面因为工艺问题存在固有误差,另一方面还会随高度、震动、温度等环境问题存在误差。当通信双方突发定时器的定时误差总和Tw加上数传电台的收发转换时间Th大于保护时隙Tb(Tw+Th>Tb)时,通信将会发生堵塞、突发同步失效等情况,进入失步的状态。所以,在TDD通信的过程中必须考虑突发同步的保护。一旦发生通信失步,立刻建立同步,以免丢失数据。
突发同步保护方案:一旦通信双方中一方无法正常接收数据帧,就会立即触发一个新的突发同步。这个触发过程是利用TDD协议中帧结构里的命令码实现的状态转移。当机载测控终端检测到数据帧错误,在下一遥测时隙发送特定命令码(0xFF)告知地面站,并进入失步状态;地面站收到相应命令码之后,也进入失步状态,重新执行突发同步建立过程。当地面站检测到数据帧错误,也通过特定命令码(0xFF)告知机载测控终端,进入失步状态;机载测控终端收到相应命令码之后,也进入失步状态,双方重新执行突发同步建立过程。
4 需求分析和性能计算
本文以某型靶型无人机为例,对测控系统的通信需求进行分析,计算测控系统的通信性能。
4.1 需求分析
某靶用型无人机所装备的数传电台性能指标如下:数据传输速率为19200bps;收发转换时间为7ms;一个突发周期不大于200ms;一个突发周期不大于200ms;硬件接口为RS-232串口,参数设置为:波特率Bd等于19200bps,包含1位的起始位,8位的数据位,没有校验位,以及1位的停止位。
该靶用型无人机的测控系统遥控数据长度Lk为10B,刷新率要求不小于5Hz;遥测数据长度Lc为32B,刷新率要求平均不小于fmax=20Hz,数据帧结构如表1和表2所示。
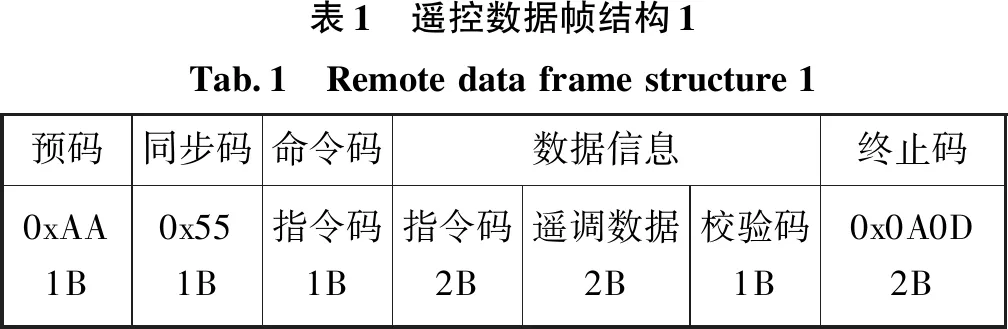
表1 遥控数据帧结构1Tab.1 Remotedataframestructure1预码同步码命令码数据信息终止码0xAA1B0x551B指令码1B指令码2B遥调数据2B校验码1B0x0A0D2B
遥控指令码设定冗余传输,采取3判2纠错方法,具体为3个接收到的指令码中有2个以上相同,相同指令码对应有效的遥控指令。若相应的遥控指令携带遥调数据,根据校验码判断遥调数据的有效性。校验码是由命令码至双方传输数据信息中的校验码之前的所有字节的和。
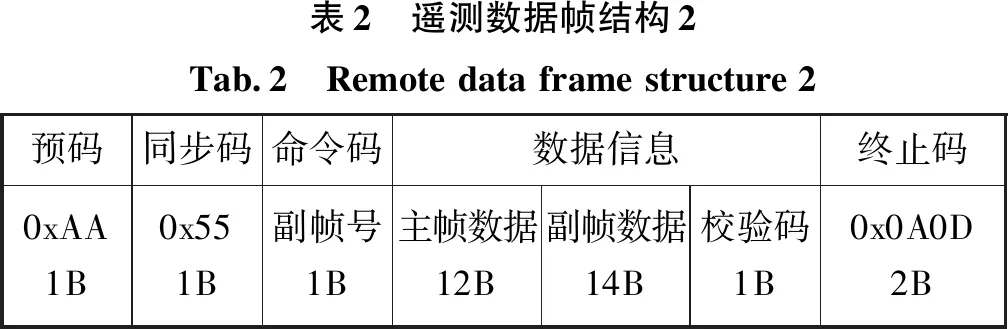
表2 遥测数据帧结构2Tab.2 Remotedataframestructure2预码同步码命令码数据信息终止码0xAA1B0x551B副帧号1B主帧数据12B副帧数据14B校验码1B0x0A0D2B
遥测数据按照具体要求分为主帧数据和副帧数据,两类数据进行分类传送。每一个遥测数据刷新周期发送1次主帧数据,该类数据应当具有变化周期快、刷新率要求高、重要度较高等特点。副帧依据不同的副帧号可以包含不同的数据类型,这些不同的副帧数据依照特定的顺序轮流发送。副帧包含的数据一般为传感器数据和机载设备状态数据,相对于主帧数据,副帧刷新率要求不高,刷新率一般为1/5遥测刷新率(共5组副帧)。
4.2 性能计算
根据接口参数设置可知,1个字节的数据对应10位,其所需的传输时间t为10×(Bd/1000)ms,遥控时隙与遥测时隙分别为
Tk=Lk×t=10×10/19.2≈5ms
(7)
Tc=Lc×t=32×10/19.2≈17ms
(8)
遥控刷新率f为
f=fk=5Hz
由于保护时隙Tb的最小值Tbmin为7ms,一个突发周期的最小值Tmin为
Tmin=5+17×n+7×(n+1)
(9)
总的时间裕度Ty为
Ty=200-Tmin
(10)
每个Tb上的平均时间裕度Tyb为
Tyb=Ty/(n+1)
(11)
Tb=Tbmin+Tyb
(12)
n的幅值大小对测控通信性能的影响,如表3所示。用户可以根据测控系统的可靠性要求和定时器精度等因素,对n值进行不同的选取;时间裕度在Tb上的分配一般采用整数分配的方式。
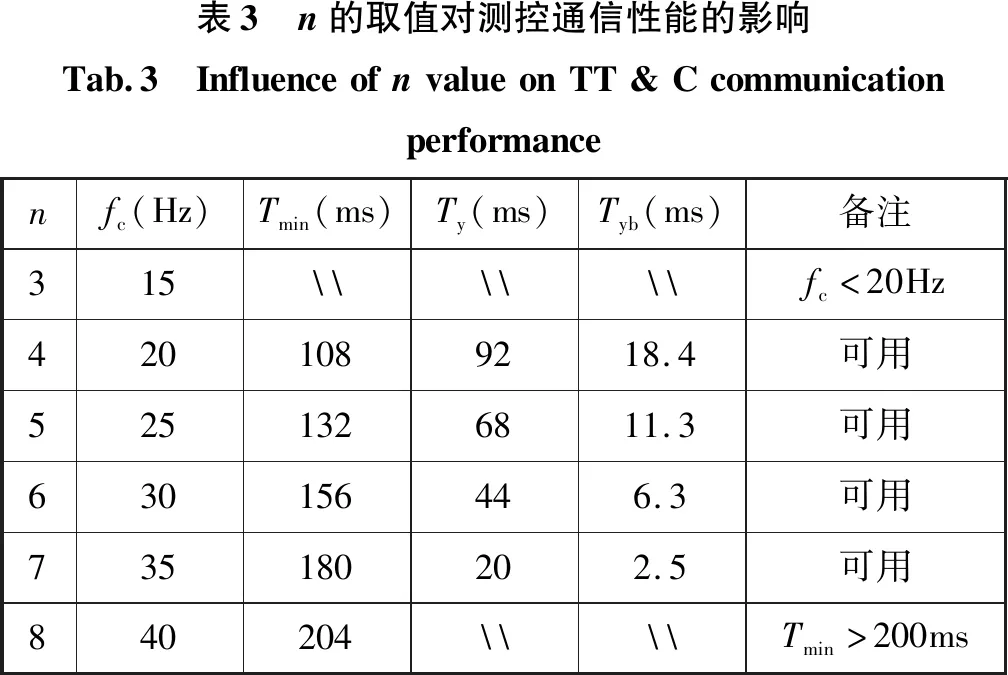
表3 n的取值对测控通信性能的影响Tab.3 InfluenceofnvalueonTT&Ccommunicationperformancenfc(Hz)Tmin(ms)Ty(ms)Tyb(ms)备注315\\\fc<20Hz4201089218.4可用5251326811.3可用630156446.3可用735180202.5可用840204\\Tmin>200ms
综上所述,某靶机测控系统选取n=4,遥控时隙后的Tb=27ms,4个遥测时隙后的Tb=25ms。
5 结束语
本文设计了一种在机载和地面站均只配备一套数传电台的基于TDD协议的单载波频带靶机测控系统,实现了全双工传输方式测控通信。经实验、试飞均对其可行性、科学性进行了验证。基于TDD方式的靶用型无人机测控系统频率利用率高、成本低、通用性好、有较高的商业推广价值。该技术可应用于其它使用半双工硬件设备的无人机测控系统,对其它无线通信产品也具备一定的参考价值。
