一种改进的微电网无功分配控制策略研究
2021-01-12
(宁夏大学物理与电子电气工程学院,宁夏 银川 750021)
分布式发电(distributed generation,DG)具备污染小、能源利用效率高、输配电资源和线路损耗比较少、安装成本低廉等独有的特点,逐渐吸引人们的关注,也是电力系统未来发展的趋势之一[1-2]。微电网的4种运行方式包含负荷突变、孤岛模式、并网模式以及切换两种运行状态,成为分布式DG的有效载体。微电网在孤岛运行时,由于不同容量DG之间输出等效阻抗的偏差,导致无功功率分配不尽合理,DG之间出现无功环流[3],对电能质量以及系统稳定产生严重影响。所以,怎样使无功负荷精确的在各DG之间分配,成为研究微电网的学者目标之一。
目前,模拟传统发电机过程的下垂控制,多采用电压以及频率控制[4-5],但无法消除线路等效阻抗的差异,并且很难精确分配无功负荷,情况严重时,各DG之间产生较大的无功环流。为此问题,文献[6]提出孤岛运行时平移下垂控制曲线,使分布式微源在并网模式下恒功率输出,降低环流。但此方法不能消除元件差异和线路阻抗不同对系统均流的影响;文献[7]应用了虚拟电阻和虚拟阻抗等改进方法实现均流,减小线路电压损耗,降低无功环流,但是采用虚拟阻抗会造成输出电压明显降落,导致系统电压质量降低而且增加了逆变器控制的计算量,工程中应用难度较大;文献[8]在传统有功∕频率下垂控制中引入无功偏差,将产生的有功扰动加入到各个无功∕电压下垂控制中,但是加入有功扰动不仅影响微电网电压质量以及系统稳,而且对频率造成波动。
综上所述,针对传统下垂控制微电网中不同容量的DG无功分配不尽合理,提出改进无功∕电压的下垂控制策略,即在传统下垂控制中加入偏差的无功功率补偿量和微源侧电压损耗恢复机制,实现了不同容量的DG之间无功负荷精确分配,大幅度降低无功环流和提高微系统电压的稳定性,同时不影响有功功率的输出。
1 传统下垂控制无功环流分析
微电网一般采用对等控制结构,主要应用在多个逆变器并联运行的情况。微源输出为阻性或感性的条件下,下垂控制才可以实现P∕ƒ,Q∕U的解耦控制[9]。
文中对非线性负载、频率高的谐波不考虑,只解决基波有功功率和无功功率的合理分配问题,低压微电网中,微源输出阻抗、线路阻抗与负载阻抗比较时都比较小。所以,认为总阻抗呈感性,满足X≫R条件,并且相角αi比较小,因此可以近似认为sinαi=αi,cosαi=1,则逆变器输出的有功和无功功率分如下式所示:
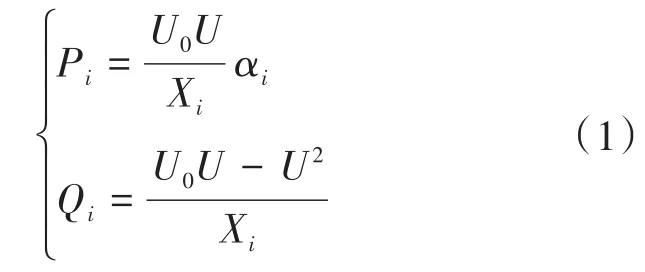
式中:U0为逆变器不带载输出电压幅值;U为公共端交流母线电压幅值;Xi为微电源侧输出的电抗。
逆变器传统的下垂控制如下式:

式中:ƒ0为空载时微源角频率;Kpi为有功下垂增益;Kqi为无功下垂增益;ƒi*,Ui*分别为微电源的角频率和电压幅值的控制量;Pi,Qi分别为逆变器输出的有功功率以及无功功率实际测量值。
将式(2)代入式(1)得到:

把滤波以及线路电抗总称为不同微源输出侧电抗。根据式(3),微源侧输出电抗Xi、微源公共端电压幅值U、逆变器不带载电压Ui*以及无功下垂系数Kqi,均影响不同分布式微源无功功的率输出。
逆变器输出的无功功率偏差ΔQ和线路阻抗差值ΔX的关系如图1所示。由图1可以看出,当系统线路阻抗差值不存在时,系统无功环流为零;线路阻抗差值越大,无功功率偏差越大,系统的无功环流越大,导致电压和系统的损耗增大[10-11]。

图1 不同微源的无功差值和线路阻抗差异关系图Fig.1 Relationship between reactive power difference and line impedance difference of different micro sources
2 改进电压∕无功下垂控制略
综上所述,基于现实情况复杂,需要更为符合工程实际的无功下垂控制策略,满足无功负荷准确分配和系统电压稳定的要求。上述文献,在容量相同的逆变器基础上对下垂控制做出改进,实验条件较为理想难以应对实际情况的复杂性。文中提出相对符合实际情况控制策略,以微电网孤岛运行为前提,不同容量逆变器按照额定容量比准确的分配无功负荷,提高系统电压的稳定性。
2.1 无功电压下垂控制设计
因为微电源输出的电压、电流经过LC滤波器,电感值较大而且微电网的传输线路短,所以微电源输出的阻抗仍为感性。微电网中P∕ƒ,Q∕U下垂控制依然适用[12]。
由式(3)可知:

所以,将微电源输出侧电压压降引入传统下垂控制中作为电压补偿量,提高不同容量的微电源对无功功率的分配精度,降低环流。
又由图1可知,线路阻抗偏差越大,系统的无功环流越大。在传统下垂控制中加入无功补偿环节抵消由线路阻抗差异带来的影响。依据上述分析,最终改进的下垂控制的表达式如下式:

式中:Kn为无功偏差的补偿系数;ΔU0为微电源输出侧电压损耗补偿;U0,ƒ0分别为微电源公共母线额定电压、额定频率;Qt为第t时刻逆变器输出的无功值;Qt-1为上一时刻逆变器输出的无功值;KnQt+Qt-1为达到新稳态的下垂控制器无功输出;Pi为系统输出有功功率;Kpi,Kqi分别为频率和电压下垂控制系数。
由于采样和执行区间存在死区的影响,使得PWM脉冲产生畸变,因此,设置固定的裕度在采样和执行区间[13]。不同容量的DG之间没有相互通讯,从而能够实现即插即用。改进型的无功电压下垂控制结构框图如图2所示。

图2 改进无功电压控制结构框图Fig.2 Improved reactive power voltage control structure
2.2 控制策略特性分析
改进的下垂控制,通过加入无功偏差补偿实现减小线路等效阻抗的差异。引入微源侧电压损耗恢复机制,补偿系统的压降。
1)无功偏差补偿:触发脉冲发出无功功率补偿信号后,将DG的下垂控制机理中t时刻采样保持的KnQt作为补偿量,跟踪补偿同步输出经过延时处理的无功值Qt-1,通过多次跟踪补偿后,不同DG之间的无功偏差逐步缩小,最后形成新的稳态值。
2)微源侧电压损耗恢复机制:弥补无功偏差补偿环节造成的电压降落和线路压降,如下式:

式中:KnQt+Qt-1为无功补偿后逆变器输出新的稳态值;U为下垂控制输出的参考电压;X为微源测输出等效感抗。
无功补偿量和源侧电压损耗补偿量引入垂控制,如图3所示。
由图3可知,通过加入无功补偿环节下垂控制输出的无功功率偏差从减小到逐步趋于稳定最终达到新的稳态。引入电压损耗补偿量后,系统的电压也能稳定在额定值附近。
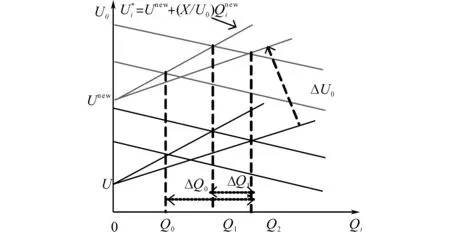
图3 无功补偿环节和电压恢复机制示意图Fig.3 Schematic diagram of reactive power compensation link and voltage recovery mechanism
2.3 改进无功算法的稳定性分析
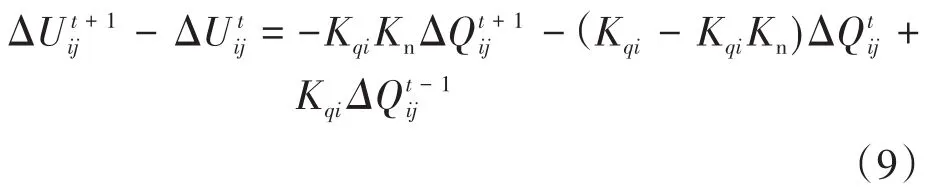
微源侧电压损耗恢复机制对不同DG之间增加的电压步长一致。由式(5)中,将不同微源i,j无功下垂控制方程相减有:

同理,可得t+1时刻方程:

式(8)与式(7)相减可得:
由式(1)可知第t和t+1时刻的离散方程:

系统在稳定运行域内假设Et+1≈Et=E且Xi≠Xj,Xi=Xj+ ΔX。
由式(10)可得:
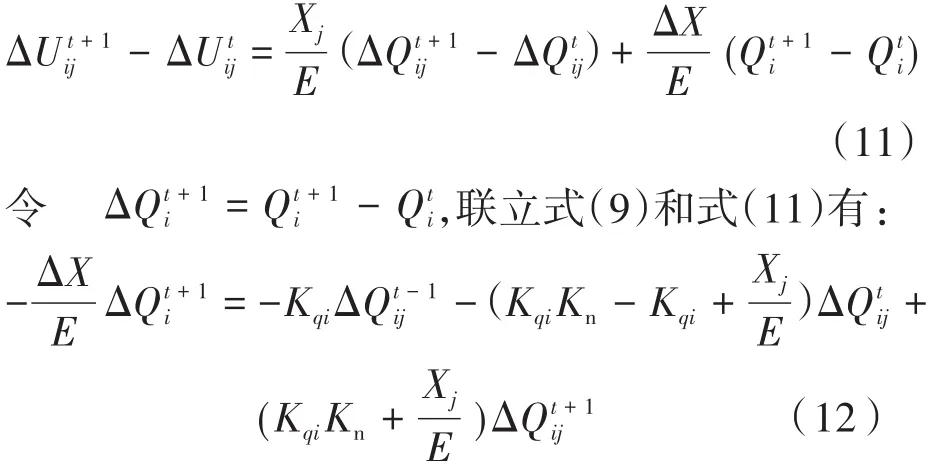
对式(12)进行z变换可得到:

由式(13)可知,如果特征根都在单位圆内,则系统稳定,即稳定条件为

由于实际情况中Xj较大,可以通过设置较小的Kqi和Kn参数满足稳定性要求。根据BIBO稳定性,通过选择合适的参数,不同微源之间的无功偏差能够维持在合理的范围内。
3 仿真研究
微电网系统采用改进无功∕电压下垂控制策略,其原理如图4所示。
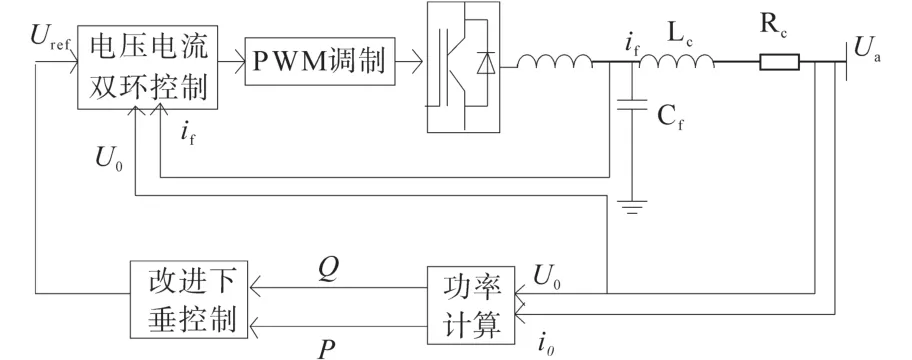
图4 改进无功电压下垂控制的整体方案Fig.4 Improve the overall scheme of reactive voltage droop control
依据改进下垂控制策略原理图搭建微电网整体Simulink仿真模型,该模型中由4台微电源、本地负载和可变负载组成。微电网不同容量微源之间,下垂控制系数依据微电源的下垂系数公式设置,其中,额定容量比为4:3:2:1,线路长度比为3:2:3:2,公共母线端电压为311 V,频率50 Hz,微源电压700 V,仿真控制参数如表1所示。

表1 微源下垂控制参数Tab.1 Droop control parameters of micro source
微电网并联4台不同容量的DG仿真运行,仿真时间设置为1.5 s:
1)0.1 s时,传统下垂控制中加入无功补偿环节;2)0.2 s时,改进的下垂控制加入微源侧电压损耗补偿量;3)0.6 s时,有功功率负荷由固定值30 kW增加到40 kW,无功功率负荷由固定值10 kvar增加到 13 kvar。
微电网输出改进前无功电压下垂控制有功功率如图5所示,改进后如图6所示。由图5、图6可以看出,不管是改进前还是改进后的无功下垂控制,微电网中不同容量的微电源均可按照额定的容量比合理分配有功负荷,负荷突变依然能按4.07:3.10:2.05:0.98准确分配有功负荷。
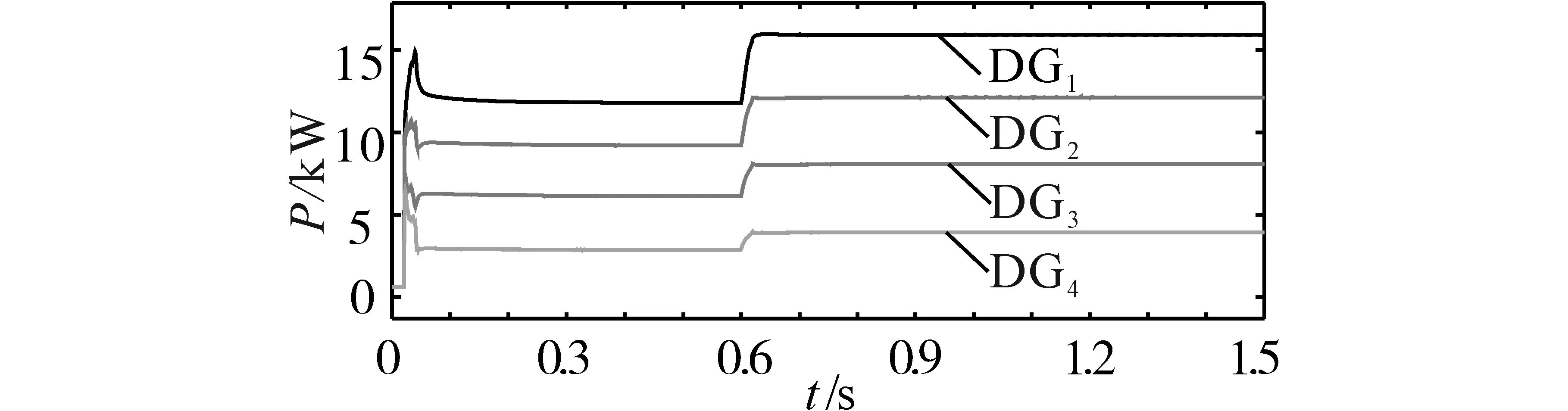
图5 微源改进前输出有功功率Fig.5 Active power output of micro power supply before improvement
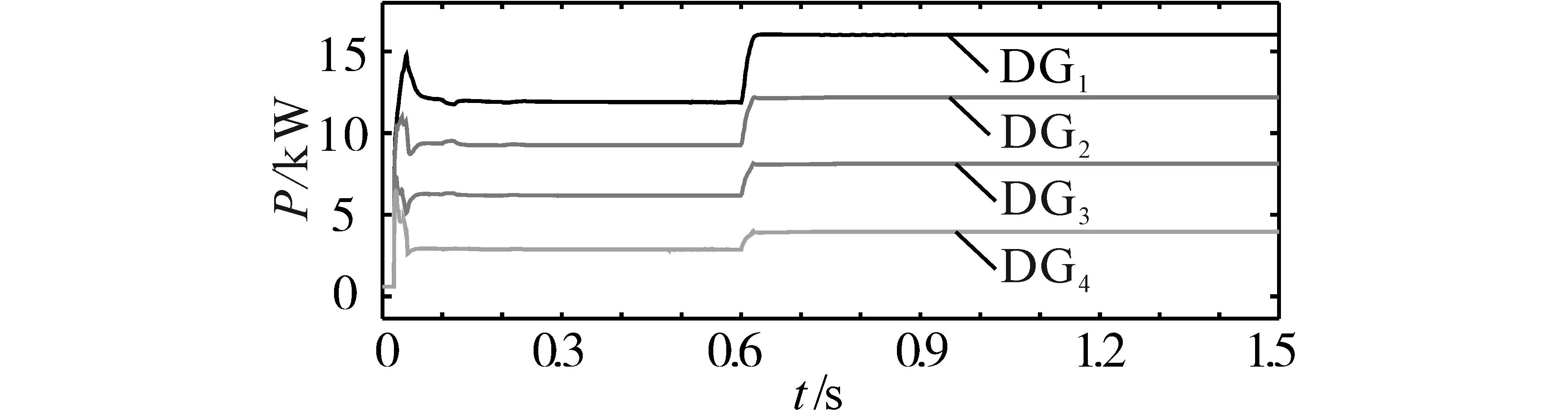
图6 微源改进后输出有功功率Fig.6 Active power output of the improved micro power supply
微源输出改进前无功电压下垂控制无功功率如图7所示、改进后图8所示。
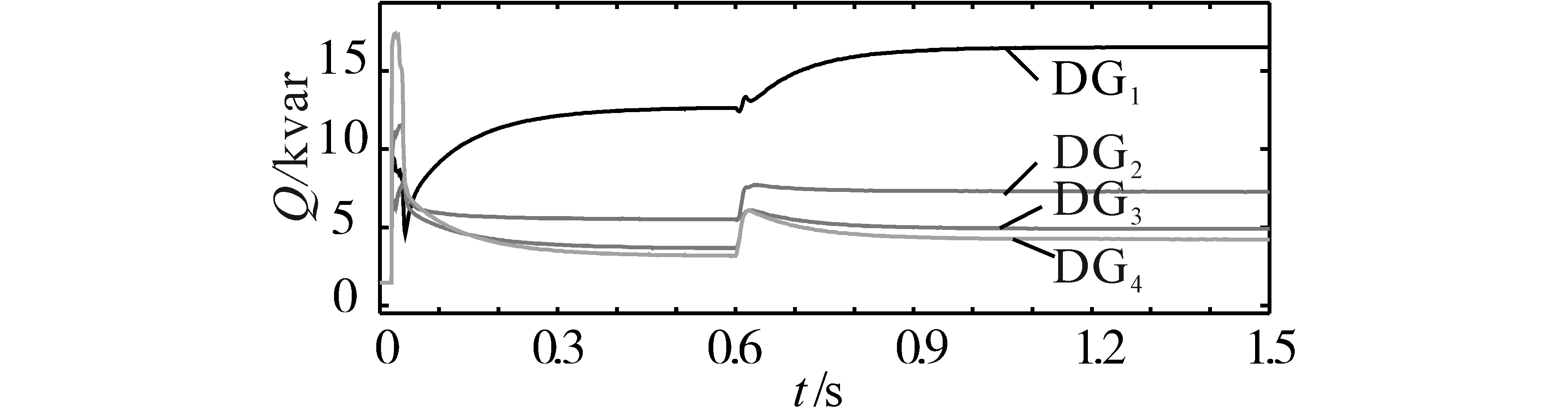
图7 微源改进前输出无功功率Fig.7 Reactive power output of the micro power supply before improvement
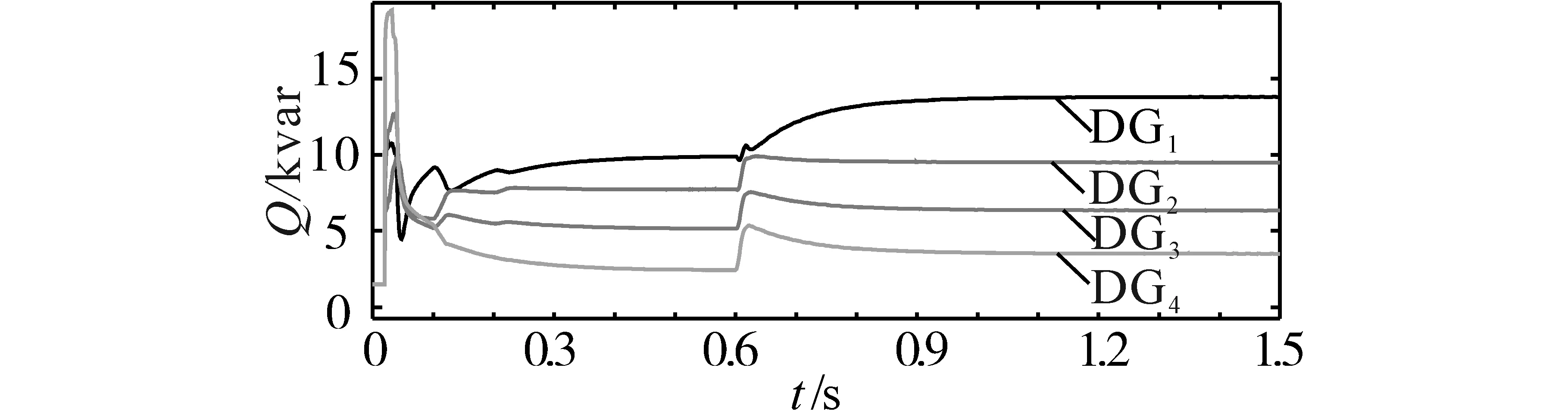
图8 微源改进后输出无功功率Fig.8 Reactive power output of the improved micro power supply
改进前,传统下垂控制明显无法按照额定容量比分配无功负荷。1)0.6 s前加入电压补偿且稳定后分配精度为:Q1:Q2:Q3:Q4≈5 000:2 200:1 400:1 200=4.16:1.83:1.16:1.20;2)0.6 s时无功负荷突增且稳定后无功分配精度为:Q1:Q2:Q3:Q4≈6 600:2 900:1 900:1 600=4.12:1.81:1.58:1.23。
改进后,1)0.1 s加入无功补偿,0.2 s加入微源侧电压损耗补偿且稳定后分配精度为:Q1:Q2:Q3:Q4≈3 900:3 100:2 000:970=4.02:3.19:2.06:0.97。2)0.6 s时,负荷发生突变且稳定运行时分配精度为:Q1:Q2:Q3:Q4≈5 500:3 800:2 500:1 300=4.23:2.92:1.92:1.00。
上述结果可以得出传统无功下垂控制由于线路等效阻抗差异的存在,微电源输出的无功功率无法按照4:3:2:1的比例准确分配无功负荷,而改进后的无功下垂控制能够减小线路阻抗偏差,实现准确分配无功负荷。
改进前后微电源之间的无功环流如图9、图10所示。
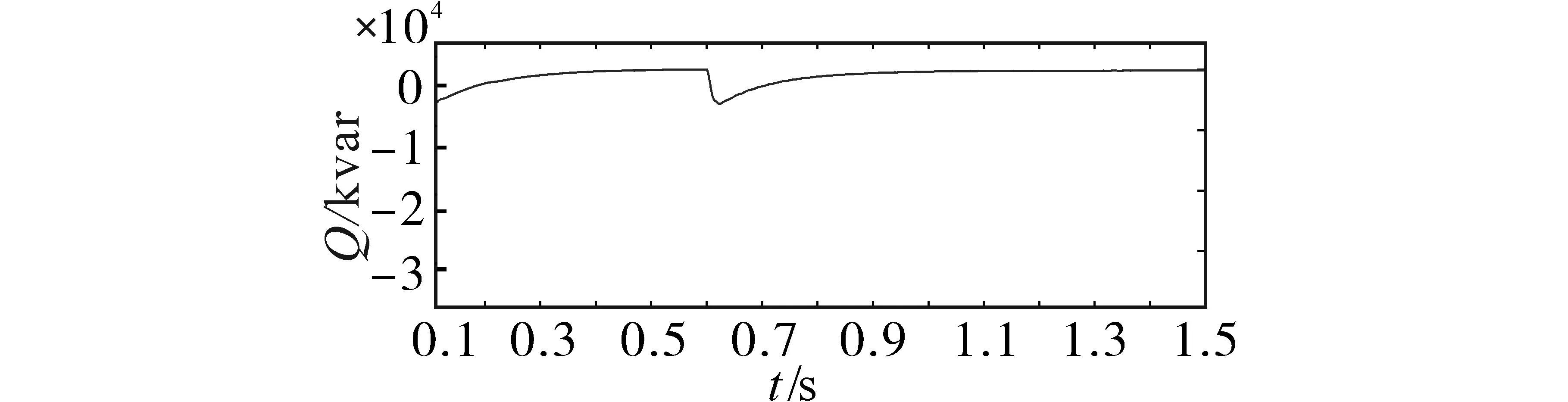
图10 改进后微源之间的无功环流Fig.10 Reactive power circulation between the micro sources after improvement
由图9、图10所示,改进前不同DG之间的无功环流为230 var,改进后的无功环流为15 var。当0.6 s时无功负荷突增,稳定后无功环流依然维持在15 var,相对于无功负荷,改进后不同容量DG之间的无功环流基本为零。改进前无功环流为零的响应时间为0.6 s,改进后无功环流为零的响应时间为0.4 s,改进后的无功环流为零的响应时间提升了0.2 s。
4 结论
本文提出的不同容量DG之间无功负荷分配的控制策略有以下特点:1)引入无功补偿环节,减小线路等效阻抗的偏差;2)加入微源侧电压损耗恢复机制,补偿电压降落和线路电压损耗。该策略能够按照下垂增益精确分配无功负荷。其中,微源侧电压恢复机制,可使电压快速、稳定的恢复到额定值附近且适应于负荷突变情况,提高了电能质量。同时,该策略抑制了无功环流对系统的损耗和降低电压质量的影响。
最后,不同容量DG间遵循微电源额定容量4:3:2:1的比例,相比传统下垂控制的精度按照4.02:3.19:2.06:0.97分配无功负荷,负载突变时以4.23:2.92:1.92:1.00分配无功负荷,改进下垂控制策略大大提高了无功负荷分配精度,同时,无功环流由230 var下降至15 var,环流基本为零,且响应时间提前0.2 s。