基于多传感器的智能自主灭火机器人的设计
2021-01-11贾佳
贾 佳
(西安航空职业技术学院 人工智能学院,西安710089)
机器人运动控制可分为基于传感器的系统和基于视觉的系统两类。基于传感器的系统利用来自不同传感器的反馈进行控制,如障碍物传感器、红外传感器、火焰传感器等[1]。而基于视觉的系统采用摄像机和图像处理技术寻找到目标位置[2]。
将消防机器人被设计成无人驾驶的地面车辆,用于搜寻火源和灭火,但很少有机器人车辆能扑灭家庭火灾和森林火灾。在火灾探测功能系统中,智能系统是最重要的系统之一[3]。安全和消防高级机器人具有探测火源和灭火的高性能。新型火灾探测器利用图像处理和设备控制算法来快速准确地探测火灾[4]。
目前,公路和铁路隧道的安全问题被认为与火灾有关的风险更大的情况下,该机器人系统可以安装在现有隧道上,而无需对现有的基础设施进行大规模改造[5]。在此设计开发了一种新型自主消防机器人,该机器人通过传感器探测房间中的火焰(燃烧的蜡烛),然后熄灭火焰,并返回到起始位置。
1 系统设计
在此所设计构造的一款能够感知火源并灭火的机器人,实现了环境传感、比例电机控制的概念。该机器人使用微控制器(Arduino)处理来自各传感器和关键硬件元器件的信息。紫外线传感器/热敏电阻/火焰传感器用于火焰的初始检测。一旦探测到火焰,机器人就会借助于所提供的蜂鸣器报警;机器人启动电子阀门,向火焰喷水。
该系统的研究主要建造了增加消防安全的机器人;设计了无需人工的火灾监测系统;开发出一种系统——能够穿越竞技场,而不用担心吸入烟雾或被烧伤;构建一个减少穿越有潜在火灾区域所需时间的系统;提出能控制人类无法到达的极端地方的火灾的系统。
该系统使用了3 个火焰传感器,根据火焰的颜色探测火情,其中1 个火焰传感器安装在机器人的前面,另外2 个固定在机器人的左右两侧。机器人由2 个伺服电机来驱动,向左、向右、向上和向后移动。机器人使用2 个超声波传感器,有助于避免任何障碍或干扰。
机器人最初处于停止状态。当它通过蓝牙接收到信号时,微控制器控制伺服电机驱动机器人向前、向后、向左、向右移动,该电机产生足够的扭矩以足够大的速度操纵机器人。该智能自主灭火机器人上安装有蜂鸣器、发光二极管。一旦火焰传感器检测到热量,就会向微控制器发送信号,并打开蜂鸣器和发光二极管,向人们发出火灾警报。当机器人到达一个特定区域时,会使用3 个火焰传感器自动探测火灾。如果该区域有火情存在,微控制器会控制水喷嘴向火焰上方移动。其间,发光二极管一直闪烁,直至机器人控制了火势。当机器人接近火源时,蜂鸣器打开,在电机的驱动下机器人向火焰喷水,同时在伺服电机996R 的驱动下,机器人以有效的灭火方式旋转机器人的消防水道[6-8]。
2 机器人设计与开发
该机器人设计包含了构建消防机制的重要组成——多种传感器、电气开关、电源、DC 电机驱动器和DC 电机。因此,该消防机制中最重要的是微控制器。各组成部分通过微控制器协调成为一个单一完整的系统[9],整个系统的框图如图1 所示。
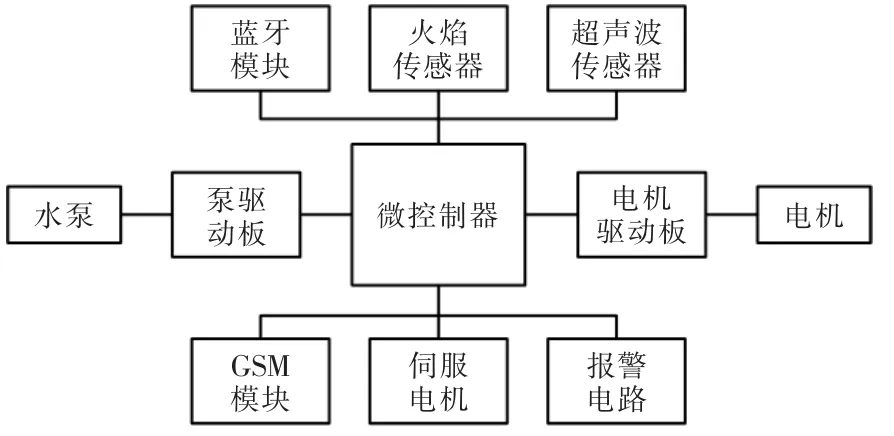
图1 系统整体框图Fig.1 Overall block diagram of system
如图可见,微控制器协调所有传感器(如超声波和火焰传感器)与制动器(如电机和泵)之间的关系。2 个DC 电机对应于机器人的2 个轮子;全球移动通信系统模块准确预测机器人的位置;蓝牙HC-05用于与机器人进行有效通信;超声波传感器有助于避开障碍物,火焰传感器用于探测火灾;电机、泵驱动板分别用于控制电机和泵。自主消防机器人的原型如图2 所示。

图2 自主消防机器人Fig.2 Autonomous fire fighting robot
3 系统硬件设计
3.1 Arduino MEGA 2560 开发板
该设计使用Arduino 开发板,因其可以灵活地转移程序[10-11]。Arduino 有54 个数字输入/输出端口,还有16 MHz 的晶振,还有一个连接Arduino 和笔记本电脑的区域,可以直接放置在提供的功能中。根据研究的任务要求,利用通用串行总线电缆将Arduino 连接到个人电脑来对其进行编程。集成开发环境为Arduino 使用的C 语言。
3.2 火焰传感器模块
火焰传感器识别热量并向微控制器报警,该传感器基于颜色有效工作。为避免传感器受损,机器人不应距离火源太近。有一个电位计调节装置的灵敏度。模块的主要组成是探测火灾的单元和具有数字输出的比较器。探测火灾的单元作用是向微控制器发送模拟信号。
3.3 超声波传感器模块
一般来说,人可以听到约20 Hz~20 kHz 的声音频率,在此采用超声波传感器来接收超声波信号。其工作原理有点像测量设备,通过读取回波值,来确定距离。
3.4 全球移动通信系统模块
全球移动通信系统模块/GSM 模块是一个芯片门,用于在移动设备或机器与全球移动通信系统或全球移动通信系统之间建立通信。电子设备(调制解调器)是一个重要的部分,它通常根据需要,主要是通过微控制器或与计算机接口。全球移动通信系统电子设备在交易终端、保护程序、气候站中包含大量的选择包。
3.5 蓝牙模块
蓝牙是一种短距离无线通信技术。在此采用了HC-05 模块,直接使用蓝牙SSP(串行端口协议),设计用于无线串行连接设置。
3.6 伺服电机
伺服电机通常在某些方面如移动机器人、无人驾驶船只或无人驾驶汽车等得到应用。伺服系统的目标尺寸从微型到工业功能的大型。通过使伺服系统产生编码信号,定位输出轴的特定角度位置。伺服系统在无线电管理发光二极管飞机中,被用来定位控制表面,就像升降舵和方向舵一样。
3.7 DC 水泵
DC 电池驱动的水泵使用来自电机、 电池或替代能源的电力。电水泵通常需要6,12,24,32 V 的DC 电能;太阳能DC 水泵使用带有星形电池的PV太阳能面板,一旦暴露在日光下就能发电。
4 软件整体设计
系统的整体操作流程如图3 所示。由图可见,首先寻找蓝牙信号。找到蓝牙命令后,微控制器开始监控超声波传感器,以避开障碍物,此外还监控火焰传感器以探测火情。如果超声波传感器检测到障碍物,则机器人向后移动预定时间t,该时间值可手动设置。然后机器人再开始移动。与此同时,火焰传感器一直寻找火焰,如果传感器检测到火焰,则微控制器立即启动警报并向相关部门报警。机器人向火焰移动,在安全距离内停下,启动水泵,向火焰喷水一段预定的时间。如果传感器仍探测到火焰,则继续运行水泵,直至火焰完全熄灭。

图3 系统流程Fig.3 System flow chart
5 测试分析
Arduino 火焰传感器为电压敏感型传感器,输入电压为0~5 V。在Arduino 串行监视器读数中,这些电压变为模拟读数(0~1023)。当火焰传感器识别到火焰时,获得模拟输出的变化。该传感器在不同的白天有不同的灵敏度,因此机器人的性能随时间变化。当机器人靠近火源时,火焰传感器也会对温度变化做出反应,并改变模拟输出。该设计的主要目的是在有或无火源情况下,在不同的白天时间和不同的距离检测火焰传感器的灵敏度,并观察火焰传感器的响应。通过这种方式,研究了消防机器人一天中最好和最坏的灵敏度变化情况。
5.1 测试流程
为检验在不同白天时间和离火源不同距离时Arduino 火焰传感器的灵敏度,在此进行了测试。在距离Arduino 火焰传感器的不同位置上,放置一支蜡烛进行不同测试。在串行监视器模拟输出端获得的最佳稳定读数是在距离火源1 m 处。在该位置上,在不同的白天,以0.5 h 为时间间隔,在有或无火源情况下获取读数。当火焰传感器探测到火情时,机器人开始向火源方向移动。每行进1 m 记录一次读数。当机器人靠近火源时,温度上升,火焰传感器的输出也发生变化,记录下输出的变化。一天的平均温度为26 ℃。
5.2 测试1 及其结果
在没有任何火的情况下,测试Arduino 火焰传感器在白天和晚上的灵敏度,机器人在距离火源1 m处分别进行测试,测试结果如图4 所示。

图4 火焰传感器灵敏度的影响Fig.4 Influence of sensitivity of flame sensor
由图4(a)可见,在7:00 时,无论有无火源,传感器都会给出较高的输出;随着时间的推移,读数不断下降,这是因为阳光中存在红外线的缘故。将近12:00—13:00 时,阳光的强度达到一天中的最高值,火焰传感器对增加的红外线也做出响应。因此,无论有无火源,其输出值均为一天中这一时候最低的。在15:00 以后,太阳的强度开始减弱,结果输出读数开始增加;当太阳落山时,它在一天结束时达到最大值。
由图4(b)可见,在有火源和无火源的情况下,整个夜晚的读数变化不大。由于在23:00—3:00 时间段不存在太阳的影响,无火源的输出读数最高,有火源的输出读数最低,这2 个读数之差在晚上的这个时候最大。该时间范围为正确区分火源和正常情况提供了最显著的差别。因此这一期间内火焰传感器探测到的火情是毋庸置疑的。
5.3 测试2 及其结果
机器人向火移动时,火焰传感器输出值的变化。当机器人探测到火源并开始向火源移动时,火焰传感器在10:00 和22:00 时刻的输出结果如图5所示。
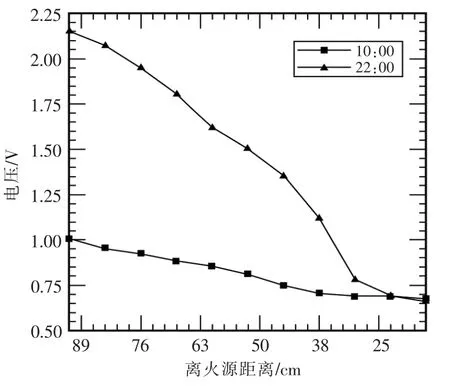
图5 机器人开始移动时火焰传感器输出的变化Fig.5 Changes in output of flame sensor when robot begins to move
由图可见,当机器人开始向信号源移动时,模拟输出会因为信号源强度的增加而降低。在距离火源最远的地方,22:00 的读数高于10:00;22:00 的读数比10:00 的读数下降得更快。这是因为在10:00 的时候来自太阳的红外线干扰了传感器的模拟读数。但是,发现在离火源可能的安全距离附近,白天和晚上的读数几乎相同,这是因为火源的影响成为主导因素。另外,在离火源较近的地方,图中2 种情况下的曲线变得同样陡峭,因为红外线随着光源强度的增加而加强。因此,在22:00 的时候,输出读数存在快速衰减,而在10:00 时衰减很小。
6 结语
在此提出了能够探测火焰并灭火的自主消防机器人。该设计已在一个两轮驱动机器人样机上成功实现。超声波传感器用于通过避障来控制机器人的运动。机器人成功探测到多个火焰源,并在安全距离内将其扑灭。机器人的速度被降低到期望的速度,以增加操作时间和对火焰源的有效检测。试验证明,该机器人鲁棒性强、效率高,性能优于传统的小型消防机器人。
