地面三维激光扫描数据拼接方法评估
2021-01-08程宇航林宇龙白征东辛浩浩
程宇航,林宇龙,白征东,辛浩浩
(1.清华大学 土木工程系,北京 100084;2.国网冀北电力有限公司,北京 100053)
地面三维激光扫描技术作为一种主动式获取物体表面三维密集点云的测量技术,具有测量速度快、精度高、全数字特征等特点,广泛应用于城市建筑物三维建模、古建筑保护、电力巡检、变形监测、矿山测量等领域,被誉为测绘领域内继GPS之后又一次技术革命[1-3]。
在利用地面三维激光扫描仪对测量对象进行扫描的过程中,由于激光沿直线传播且测量环境中遮挡物的存在,实际测量时需要对测量对象进行多测站多视角扫描,获取测量对象的分站点云数据。然后将各个测站的点云数据进行拼接,得到测量对象的整体点云数据,为后续的点云数据处理提供数据基础[4-6],点云拼接示意如图1所示。
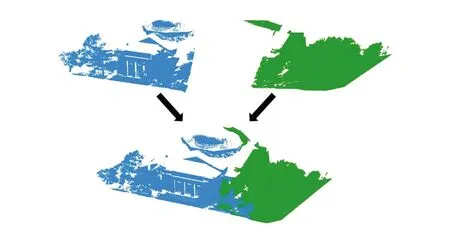
图1 点云数据拼接示意图
点云数据拼接的实质是把不同视点的点云数据统一到同1个坐标系下,使之成为1个整体[7-9]。当前,外业测量中点云数据拼接方法主要有标靶拼接、特征点拼接、点云视图拼接、已知后视点及后方交会等五种[10-11]。在实际工程应用中,考虑到不同的测量环境,选取一个合适的拼接方法可以提高外业测量及内业数据处理的精度与效率[12-15]。目前,对于上述点云拼接方法的拼接精度与拼接效率的研究较少,点云拼接方法的选取无据可依。鉴于此,首先介绍对标靶拼接、特征点拼接、点云视图拼接、已知后视点及后方交会等5种点云拼接方法,并通过实验对这5种拼接方法的拼接精度对比。同时,综合考虑5种拼接方法的精度与效率,为不同实际工程情况下选取合适的拼接方法提供参考。
1 地面激光扫描点云数据拼接方法
根据点云数据扫描与拼接在时间上的先后关系,可以分为实时拼接与事后拼接。
1.1 实时拼接
实时拼接是指点云数据拼接与扫描同时进行,扫描时获取到的点云坐标即为统一坐标系下的坐标。常用的拼接方法有已知后视点的拼接和后方交会的拼接两种,示意图分别如图2和图3所示。
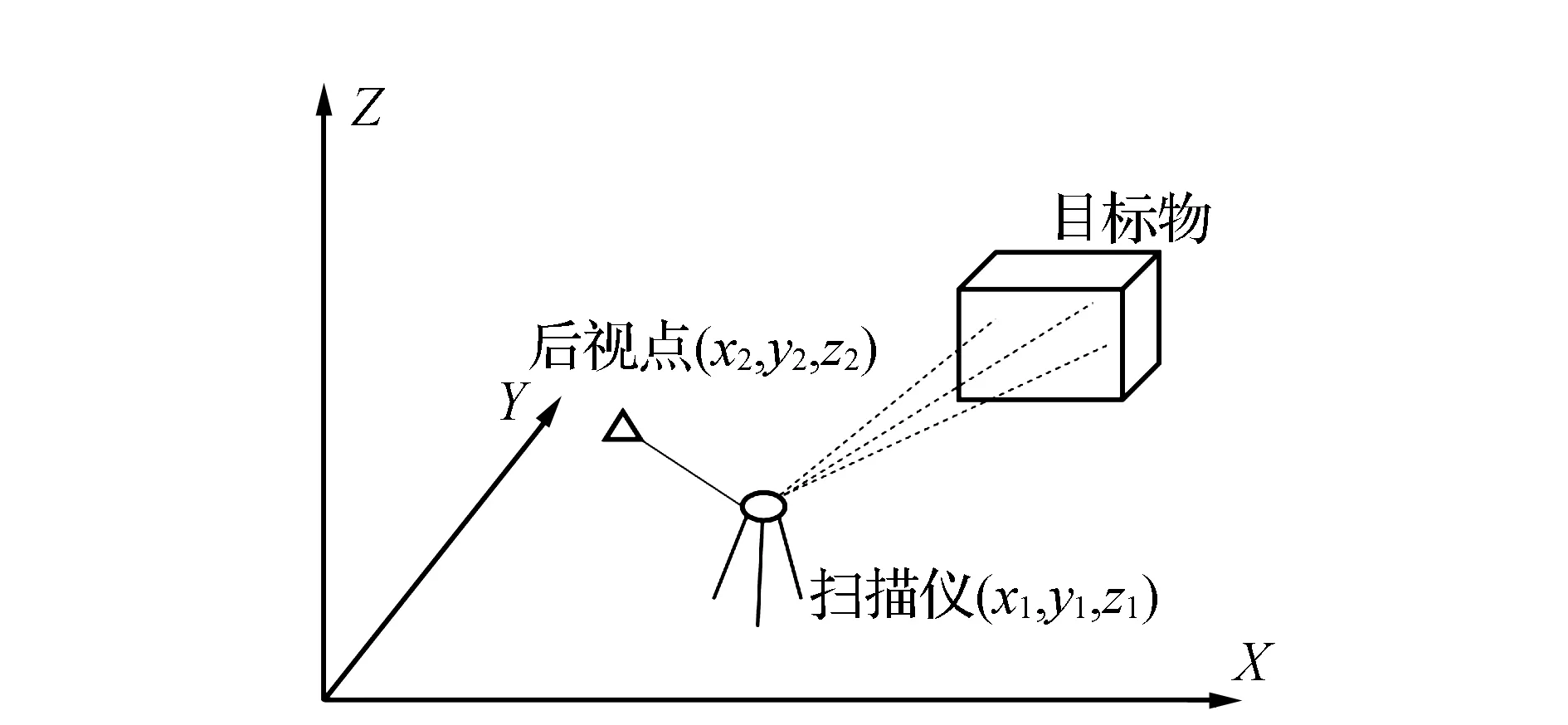
图2 已知后视点拼接

图3 后方交会拼接
1)已知后视点拼接。已知后视点拼接是指在扫描仪设站时分别对扫描仪及其后视点在统一坐标系下的坐标进行设置,扫描前对后视点进行扫描获取。凭借扫描仪和后视点的坐标以及两者之间的定向,确定测量对象在统一坐标系中的位置,即可获得测量对象表面点云在统一坐标系下的坐标。
2)后方交会拼接。后方交会拼接是指在扫描仪设站时对扫描仪的两个后视点在统一坐标系下的坐标进行设置,扫描前对两个后视点进行扫描获取。观测两个已知后视点的水平夹角,可以计算得到扫描仪坐标并确定测量对象在统一坐标系中的位置,即可获得测量对象表面点云在统一坐标系下的坐标。
1.2 事后拼接
事后拼接是指在点云数据获取完成之后,在内业数据处理过程中进行点云拼接。当采用事后拼接方法时,实际测量中需要进行多站扫描,扫描时激光扫描系统一般使用的是扫描仪自定义的坐标系。这种情况下,点云数据拼接的实质就是各站坐标系之间的平移和旋转,使不同坐标系下的点云数据统一到同一坐标系下。
(1)

(2)

1)标靶拼接。标靶拼接是利用扫描仪可以精确识别的特制标靶作为公共点进行点云数据拼接,标靶根据其形状又可分为球形标靶和平面标靶,标靶中心坐标可被扫描仪自动获取,获取精度达2 mm@50 m。实际测量时,将这些标靶放置在扫描范围的公共区域适当位置,保证相邻测站都能扫描到3个以上的公共标靶,便可实现点云数据拼接。
2)特征点拼接。特征点拼接的原理与标靶拼接相类似,只是在公共点选取上,需要人工选取两个测站公共区域内的特征点作为公共点来解算坐标转换参数。实际测量中,一般会选择一些易于识别且几何特征明显的点,如角点、边界点、标志物等。
3)点云视图拼接。采用点云视图拼接方法时,既不需要布置标靶,也不需要设定测站坐标。通过人工操作将两测站的公共区域重叠在一起,再根据迭代最邻近点算法(Iterative Closest Point,ICP)计算出相邻测站坐标系之间的坐标转换参数完成点云拼接。点云视图拼接的操作一般在点云数据处理软件中进行。
2 实验方案
2.1 实验仪器
本文采用的是Leica ScanStation P50三维激光扫描仪,扫描距离可达1 000 m,能够在360°×290°的扫描视场内以1 000 000点/s的速度进行数据采集,测距精度可达1.2 mm+10 ppm。
2.2 实验设计
为了对标靶拼接、特征点拼接、点云视图拼接、已知后视点及后方交会等五种拼接方法的拼接精度进行对比,本文设计一个专门实验。采用Leica ScanStation P50分两站对实验场地进行扫描,每站扫描区域中布设4个自制黑白平面标靶作为标志点,在两站公共区域布设3个Leica平面标靶,实验场地示意图如图4所示。同时,采用Leica TS60全站仪精确测量8个自制黑白平面标靶的中心坐标。

图4 实验场地示意图
分别利用上述5种拼接方法对采集到的两站点云数据进行拼接,拼接后得到的5组点云数据如图5所示。为了衡量5种点云拼接方法的拼接精度,在拼接得到的点云数据中手动拾取8个自制黑白标靶的中心坐标,分别计算4对标靶(1&7、2&8、3&5、4&6)两两之间的距离,计算其与利用LeicaTS60全站仪的测量结果的差值作为衡量点云拼接精度的指标。

图5 5种拼接方法点云数据
3 实验结果与分析
5种点云拼接方法及全站仪获取到的8个自制黑白标靶的中心坐标见表1,各点坐标均为各自坐标系下的坐标。

表1 5种拼接方法与全站仪获取的标靶坐标 m

续表1 m
根据表1中的自制黑白标靶的中心坐标计算相应标靶两两之间的距离,5种拼接方法计算距离与根据全站仪测量结果计算的距离进行比较,将差值作为衡量拼接精度的指标,其结果见表2。
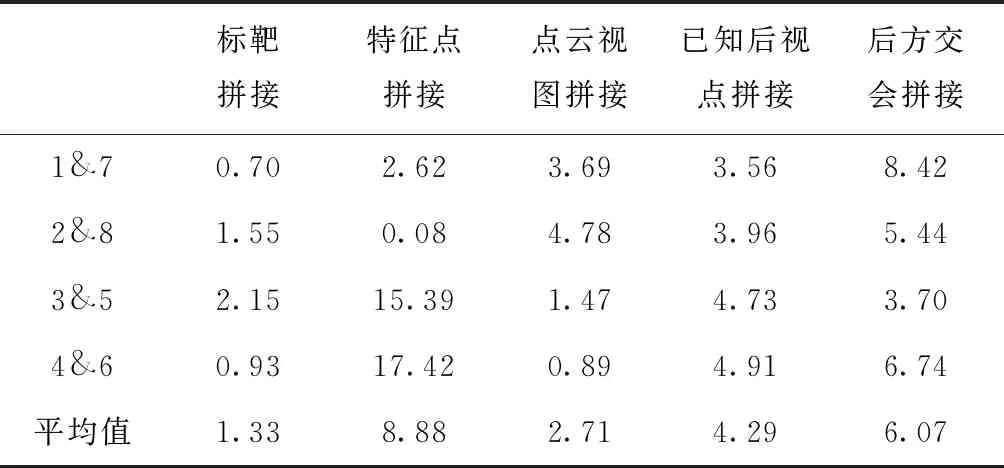
表2 5种拼接方法与全站仪计算结果差值 mm
如图6所示,从实验结果可以看出,在50 m的测量距离内,标靶拼接的精度最高,特征点拼接方法的精度最差,五种拼接方法的拼接精度均达到了毫米级。然而,特征点拼接的最大拼接偏差达到了厘米级,这是因为激光扫描仪在扫描时会按一定的间隔来获取点云,导致肉眼选取的特征点实际上可能并不是一对同名点,存在一定的偏差,所以拼接精度较低。点云视图拼接、已知后视点和后方交会三种拼接方法的拼接精度较为接近,但较标靶拼接在拼接精度上还存在一定差距。

图6 精度对比实验结果
在实际工程应用中,需要同时考虑拼接方法的精度、效率与适用条件来决定点云数据的拼接方法,根据实验结果对五种拼接方法的特点总结如表3所示。

表3 5种拼接方法对比
对于一些测量范围较小、精度要求较高的应用场景,如古建筑的扫描、电塔变形监测等,标靶拼接更为合适;对于一些测量范围很大、精度要求不高的应用场景,如地形扫描、输电线路扫描等,已知后视点或后方交会的拼接方法更为合适;当测量范围内无已知控制点或标靶的布设与拾取上存在一定困难时,点云视图拼接更为合适,既不需要布置标靶,也不需要设定测站坐标;而特征点拼接无论在精度上还是在效率上,都不具备优势,实际工程中一般不考虑此种方法。
4 结束语
本文介绍了地面激光扫描的标靶拼接、特征点拼接、点云视图拼接、已知后视点及后方交会等5种点云数据拼接技术的工作原理,并结合实验对各种拼接方法的拼接精度进行了对比实测。结果表明,在50 m测量距离内,5种点云数据拼接方法的精度分别为1.33 mm、8.88 mm、2.71 mm、4.29 mm和6.07 mm,其中标靶拼接的精度最高。在实际工程具体情况中,作业人员应综合考虑扫描作业区域环境条件和工程的精度与作业效率要求,选取最合适的点云数据拼接方法。