火电厂过热汽温的优化控制算法研究
2021-01-07苗荣霞马路遥蔡奇志
苗荣霞,马路遥,蔡奇志,杨 靖
(西安工业大学 电子信息工程学院,西安 710000)
0 引言
在火力发电机组中锅炉过热蒸汽温度对安全经济体制起着至关重要的作用,是检验火电厂锅炉过热蒸汽温度控制精度和系统运行性能的首要评判指标,对过热蒸汽温度控制品质的好坏直接影响到整个火电机组运行的平稳性、安全性与经济性。火电机组的平稳、安全、高效的运行对火电厂来说具有重大意义。炉内的过热蒸汽过高就会造成部分炉内输送管道和炉内设备器件的形变,很容易造成机组运行的安全隐患;而炉内的过热蒸汽温度过低,则会大大降低火电机组的运行效率。因此在任何条件下炉内的过热蒸汽温度都应该在其规定的范围之内。大型火电厂火电机组过热蒸汽温度在干扰情况下动态误差要求控制在拟定值±5%,无干扰情况下静态误差要求控制在拟定值±1%或±1.5%以内。鉴于传统PID控制算法在控制被控对象时需要准确的函数模型,而过热蒸汽温度及其扰动的数学模型具有非线性、强时变性,采用传统PID控制算法已经难以实现锅炉过热蒸汽温度的控制精度,因此研究火电厂锅炉过热蒸汽温度控制具有至关重要作用。
目前,针对过热汽温控制问题研究人员进行了大量研究[1],文献[2]提出了DMC控制过热蒸汽温度的控制策略,该策略利用DMC能直接处理带有纯滞后对象和对大惯性有较强适应能力的特性,实现了DMC对过热蒸汽温度控制的优化仿真。但此控制方法在系统具有模型误差和消除扰动两种状况下,系统误差校正的选择是抵触的,难以实现系统稳定性和抗干扰能力并存。文献[3]利用模糊算法不依靠被控对象数学模型的控制特性,使模糊算法和串级PID控制算法结合使用,提出了模糊串级PID控制算法。但是模糊控制算法当中的规则以及隶属度函数均由长时间累积的经验形成和制定,受经验影响模糊控制算法实行起来结果也会错综复杂,不易归纳总结。文献[4]提出采用径向基神经网络优化串级PID的控制算法,这种方法采用最近邻聚类法和梯度下降法联合的混合学习算法构造RBF神经网络,实现对温度模型的识别以及对串级PID控制输出参数的修正,但是此算法缺陷在于RBF神经网络的建立需要大量训练数据的提供,并不容易实现。文献[5]针对常规PID控制调节效果动态性能差的问题,提出基于一阶加纯滞后模型,将一种改进的内模PID控制方案应用于火电厂火热蒸汽温度的控制,此控制策略可以实现系统动态误差的缩小和抗扰动能力,对具有大延迟、惯性强的被控对象能够实现有效控制,但对于具有非线性和强时变性的被控对象控制效果较弱。
本文针对火电厂过热蒸汽温度控制,提出针对火电厂过热蒸汽温度控制的基于DMC的改进串级PID控制算法,通过仿真比较验证了本控制策略的控制能力。
1 DMC优化串级PID控制系统设计
以SMPT-1000系统锅炉单元的反应器中过热蒸汽温度为主控制器的被控制对象[6],而物料入口流量为辅控制器的被控对象。反应器过热蒸汽温度与物料入口流量的PID串级控制算法,在PCS7中AS站实现基本控制回路。本系统利用PCS7 SIMATK:Manager进行工艺过程的工程师站的组态、操作员的组态以及数据网络的组态,并用模块化的编程工具CFC,编写SMPT-1000系统中物料入口流量与反应器压强的串级PID控制回路以及其余变量的简单控制回路,利用SFC编写工艺流程的开车顺序,并编译所有程序,进行系统硬件组态与软件组态的下载,完成系统所有控制程序的调试。SMPT-1000物料入口流量信号通过S7-400PLC采集与上位机进行Profinet通讯。在MATLAB中实现DMC算法框架的搭建,采用OPC通讯协议,将OS站作为OPC服务器,Matlab作为OPC客户端,实现Matlab与OS站的数据交换。通过Profibus通讯,实现OS站与AS站中反应器入口流量与温度串级PID控制的数据交互,最终实现对过热蒸汽温度的优化控制,如图1所示。

图1 系统整体框架设计图
2 预测算法结构
目前动态矩阵(DMC)控制算法是应用最为广泛,且基于被控对象开环阶跃响应模型的一种预测控制算法,在控制中包含了数字积分环节,对消除系统静差非常有效,其模型搭建简易,且对被控对象模型采用实时的反馈滚动校正,提高了动态矩阵控制算法在控制系统任何情况下使被控对象模型与之匹配的能力和抗扰动能力。而采用滚动优化的运算方法,主要应对于具有大滞后、强耦合、强时变性等很难建立出精准被控对象的数学模型。
动态矩阵(DMC)利用系统信息,建立基于系统阶跃响应的简易模型,没有模型结构上的限制,但有很强的功能性,这样不但免去了对复杂模型的识别过程,还易于在控制器中实现。同一条件下,在测取系统阶跃响应系数时,可以对多次测量的结果进行均值分析,并得到准确的预测模型。随后采用闭环算法,通过滚动优化确定系统的控制系数,减小模型误差以及其在实际过程中存在的其他不确定因素的影响,使系统紧密的跟随设置的期望值。
预测算法结构中反应器温度模型的预测、对反应器温度实施控制的控制器和对参数修正的校正器是DMC的三大组成部分;反应器温度模型的预测通过采用单位阶跃响应模型预测过热蒸汽温度未来的输出值;控制器包括滚动优化,只取计算出的m个控制量中的第一个作用于蒸汽温度,使控制系统输出具有很高的动态特性;校正器包括误差校正部分,采用当前的蒸汽温度实际输出值x和蒸汽温度预测的y比较得出的温差e来修正未来其他时刻的温度预测值。DMC算法控制结构如图2所示。
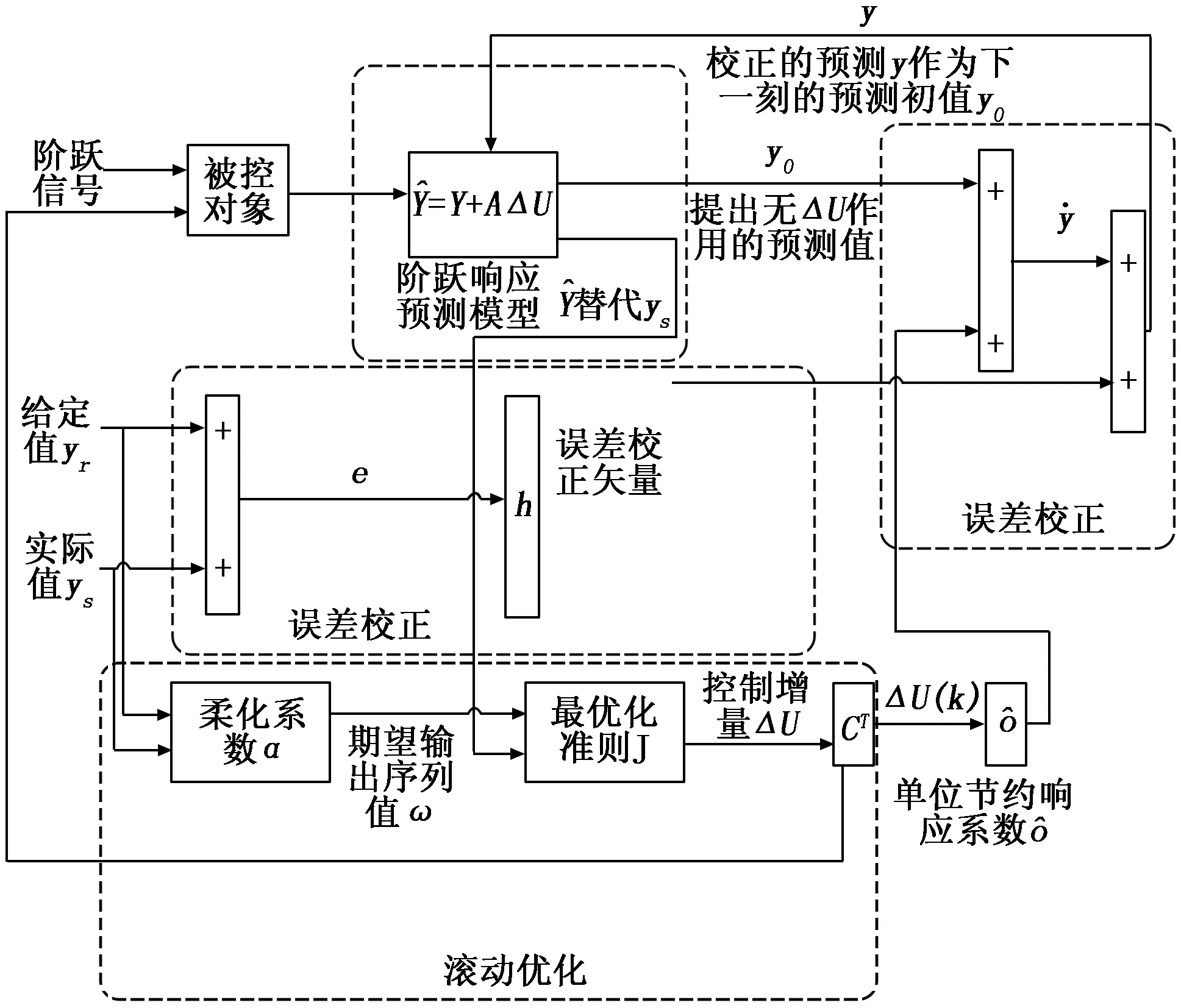
图2 DMC算法控制结构图
1)模型预测:
给蒸汽温度一个阶跃信号后可得其阶跃响应,单位阶跃响应在采样时刻的值是用动态系数a1,,ap来描述的,ap是足够接近稳态值的系数。
若在所有k-i(i=1,2,,k)时刻同时有输入,则根据叠加原理有:
(1)
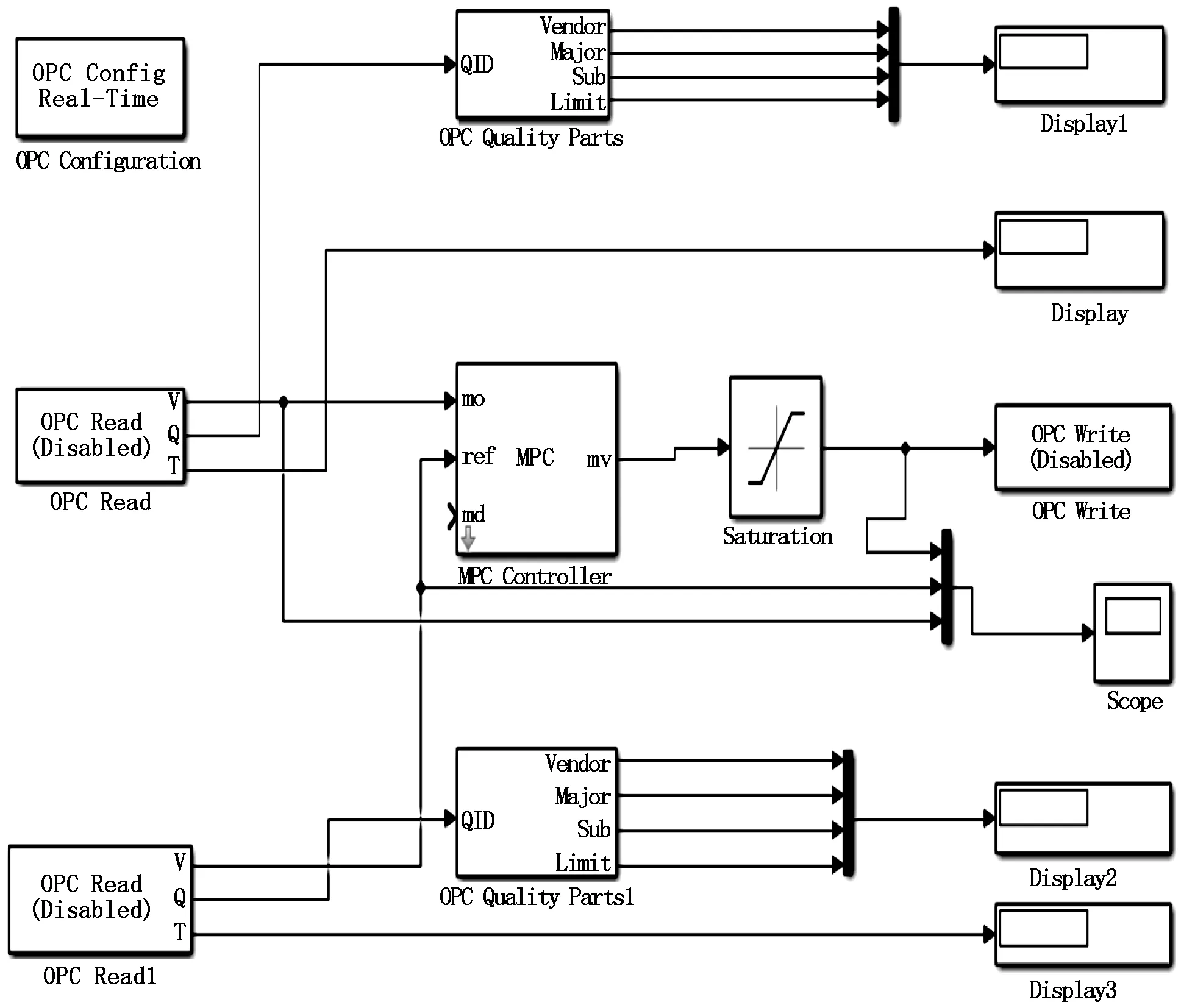
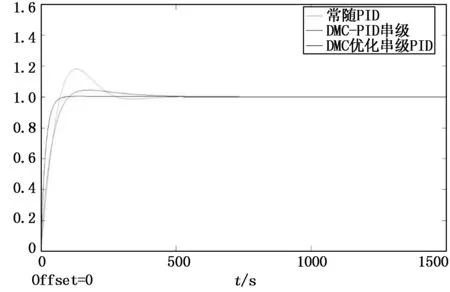
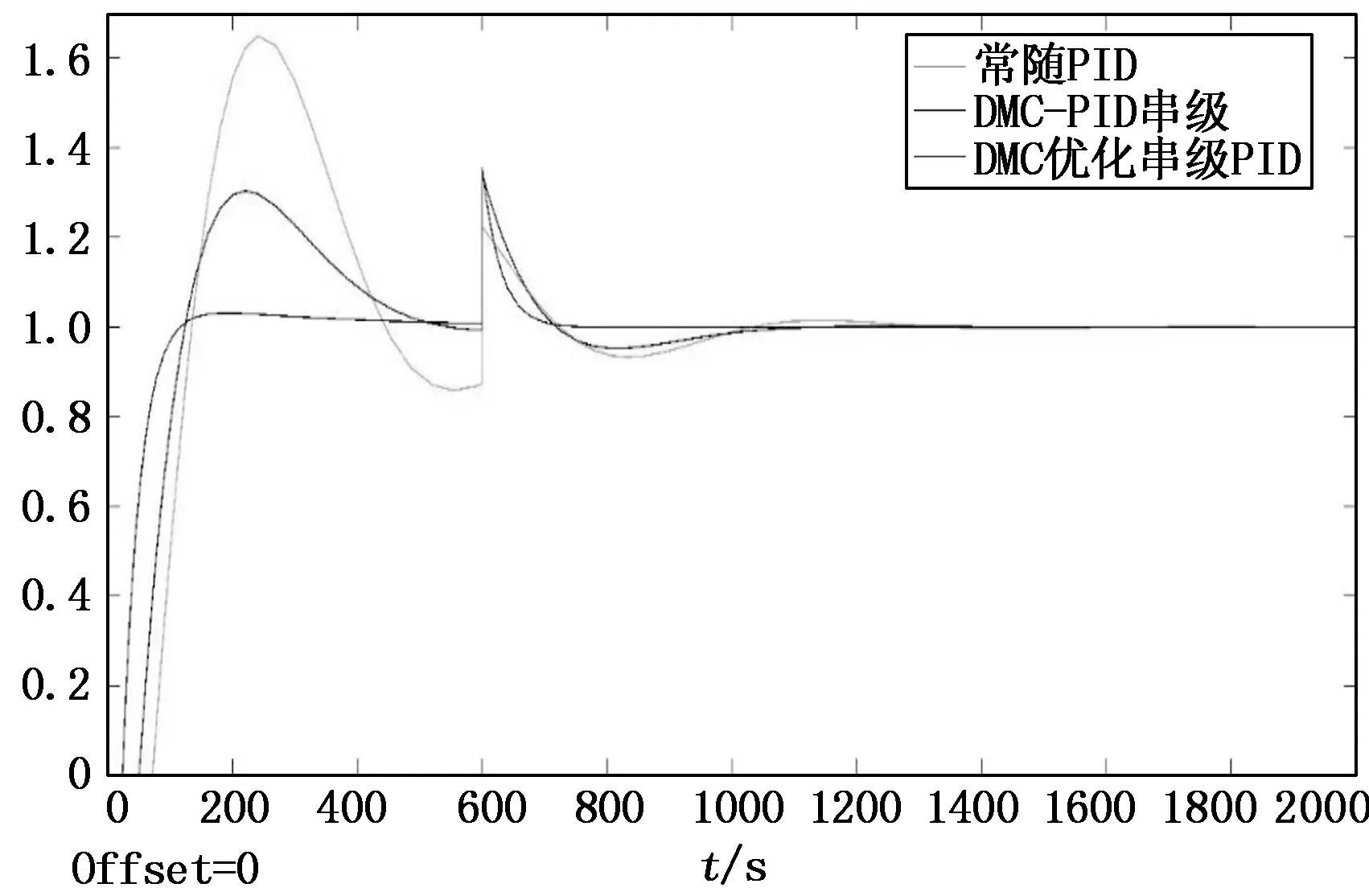
利用上式可以得到y(k+j)的n步预估(n (j=1,2,,n) (2) 由于只有过去的温度控制输入是已知的,因此在利用动态模型做预估时有必要把过去的输入对未来的输出贡献分离出来,上式可以写成: (3) 上式右端前两项为过去输入对输出的n步预估计,记为: (j=1,2,,n) (4) 将式(3)写成矩阵的形式: (5) 为增加系统的动态稳定性和控制输入的可实现性,以及减少计算量,可将Δu组成的向量减少为m维(m (6) 记: ΔU=[Δu(k),Δu(k+1),,Δu(k+m-1)]T; Y0=[y0(k+1),y0(k+2),,y0(k+n)]T; 则式(3)可以写成: (7) 2)滚动优化: 控制系统的动态响应系统数和系统的控制增量是模型预测的决定性因素,DMC控制算法的控制增量是通过使最优化准则的值为最小来确定的,能够使系统在未来n个时刻的输出值尽可能接近期望值,为简单起见,取控制加权系数λ(j)=λ(常数)。 若令: W=[w(k+1),w(k+2),,w(k+n)]T (8) 式中,w(k+j)称为期望输出序列值,在预测控制类算法中,要求闭环响应沿着一条指定的、平滑的曲线到达新的稳定值,以提高系统的鲁棒性。 一般取: w(k+j)=αjy(k)+(1-αj)yr(j=1,2,,n) (9) 式中,α为柔化系数,0<α<1;y(k)为系统实测输出值;yr为系统的给定值则最优化准则为: J=λΔUTΔU+(Y-W)T(Y-W) (10) 得到控制增量: ΔU=(λI+ATA)-1AT(W-Y0) (11) 式(11)与实际值无关,是DMC 算法的开环形式,偏差较大又不能抑制系统受到的扰动,故采用闭环控制算法,将计算出来的m个控制增量中的第一个值用于闭环控制,可以增加系统的动态稳定性和控制输入的可实现性,以及减少计算量,实际使用的控制增量为: Δu(k)=cT(λI+ATA)-1AT(W-Y0)=dT(W-Y0) (12) 式中,cT=[1,0,,0];dT=cT(λI+ATA)-1AT 3)温差校正: 在k时刻实施控制作用后,在k+1时刻的实际输出y(k+1)与预测的输出: (13) 不一定相等,这就需要构成预测误差: (14) 并用此误差加权后修正对未来其他时刻的预测即: (15) 令: (16) 由式(15)和(16)得下一时刻的预测初值为: (17) 由于动态矩阵的控制模型具有卷积的性质,使得DMC控制算法采样周期大大增加,而且达不到常规PID控制算法采样周期的百分之三十,所以在应对工艺过程中一些干扰因素的突发影响,其使系统抗扰动方式却没有串级PID控制算法更为有效。因此,为了使系统抗扰动能力的提高,充分发挥DMC与串级PID控制算法各自优势,将串级控制结构引入动态矩阵,在内环采用的是串级PID控制算法,主要是抑制系统中由突发因素引起的强扰动,而外环采用动态矩阵控制算法,其良好的跟踪性在被控对象模型适配时发挥更好的鲁棒性。因此对于拥有大延迟、大惯性、非线性、强时变性的工业被控对象来说,采用DMC改进的串级PID控制效果更加显著。 火电机组的反应器内部反应复杂变量种类繁多,并且具有大滞后、强时变、强耦合的特性。而对于火电机组的反应器而言,反应器温度控制指标的要求非常严格,但是反应器中的干扰因素较多,比如反应器物料入口流量以及反映器内压强,都会对反应器温度产生极大影响,为了实现系统的动态平衡,可以通过控制物料入口流量来控制反应器压强,进而控制反应器温度。因此,本文针对不同性质的被控变量分别采用不同的控制策略。反应器物料入口流量和反应器压强是无延迟和惯性的被控变量,因此采用串级PID控制策略可以完美的实现工艺控制要求。但是由于反应器温度具有大滞后、强时变、强耦合的特性,采用简单的控制算法往往无法达到工艺的控制标准,因此本文采用动态矩阵改进串级PID的串级控制结构来控制反应器中的过热蒸汽温度。DMC优化串级PID控制的结构设计如图3所示。 图3 DMC优化自适应串级PID控制结构图 仿真测试平台由OS站和Matlab仿真软件共同搭建完成。启动WINCC 时,系统会自动启动内部的OPCServer,完成以OPC技术为通信桥梁的数据通信,而Matlab可以通过OPC工具箱OPCtool与OPCServer建立连接、传输数据,进而实现Matlab与Wincc的数据通信。以OS站作为OPC服务器,Matlab作为OPC客户端,两者均采用OPC协议实现数据交换。仿真模型用图4所示的OPC configure建立出Matlab客户端与OS站服务器的连接,其中将从OS站中读取到的实际参数添加在OPC Read中,把Matlab运算后的结果添加在OPC Write中。 图4 Simulink模型的搭建 在火电机组工作过程中具有较为复杂的工艺流程,反应罐是火电机组的重要组成部分,为了保证火电机组高效、绿色、减排地运行,需要对反应罐中的变量进行合理把控。合理的控制策略,能够实现反应罐物料入口流量的控制、反应罐的压强控制以及反应罐的温度控制,并确保各个变量之间相互协调,保障火电机组安全、平稳地运行。但是火电机组中反应罐的工艺过程相对复杂,工作过程中会出现高温、高压的情况,因此将实际机组装置中的反应罐移动到实验室进行控制策略的研究非常困难。对此,本文采用SMPT-1000高级多功能过程与控制实训系统,此系统采用工业级高精度动态仿真技术,为实现优质控制策略提供有效平台。 为验证本文提出采用DMC改进串级PID控制算法的优越性,通过Matlab进行仿真同时与常规PID控制与DMC-PID串级控制进行对比分析研究。以SMPT-1000中反应器中大惯性、大时延、强时变的过热蒸汽温度被控对象为例,测试实验控制三种不过热蒸汽温度模型,对被控对象模型进行优化控制。针对三种过热蒸汽温度控制的模型,进行DMC改进串级PID的对比试验,验证本控制算法较常规PID和DMC-PID串级控制在被控对象发生改变时调节效果上的优势。 图5 模型一 图6 模型二 图7 模型三及其二次扰动 稳定性仿真分析使用Matlab软件平台对DMC改进的串级PID控制算法与DMC-PID及常规PID进行控制仿真验证。通过以上仿真实验对比可以看出在模型一和模型二下,采用DMC改进串级PID进行控制,通过性能指标分析,结果较常规PID和DMC-PID串级控制相比,模型一中常规PID调节时间为417 s,DMC-PID串级调节时间为266 s而基于DMC改进的串级PID调节时间为200 s,系统调节时间分别为分辨缩短了52%和25%。模型二中常规PID调节时间为413 s,DMC-PID串级调节时间为311 s而基于DMC改进的串级PID调节时间为215 s,系统调节时间分别为分辨缩短了48%和31%。 抗扰动仿真分析使用MTALAB软件平台对DMC改进的串级PID控制算法与DMC-PID及常规PID进行控制仿真与干扰验证。在模型三下,常规PID调节时间为331 s,DMC-PID串级调节时间为288 s,而基于DMC改进的串级PID调节时间为156 s,系统调节时间缩短了53%和46%,在600 s时给锅炉水位控制系统施加设定值为10的单位阶跃响应,待水位稳定在设定值后,仿真效果与DMC-PID和常规PID控制系统相比,在二次扰动之后调节时间分别缩短了37%和15%,能够极大限度地消除超调量,使得被控对象的特性曲线更加稳定,降低了曲线的波动性。DMC改进的串级PID算法系统在超调量和调整时间上均获得了更好的控制效果,在过热蒸汽温度扰动发生时系统相应速度快、调节时间短,使汽包液位稳定在设定值范围内无误差,对于锅炉过热蒸汽温度与物料入口流量的扰动表现出较好的抑制能力。综上所述,通过对比仿真实验结果分析,通过采用DMC改进串级PID的控制算法,可以极大地缩短控制系统的调节时间,消除稳态误差以及超调量,在很大程度上增强了系统的动态性能,并能够合理控制被控对象的实时变化,尤其是在具有大延迟、大惯性、多扰动、强时变特性的被控对象上有着不可比拟的优势。 本文针对火电厂过热蒸汽温度的优化控制算法进行研究,提出DMC改进串级PID控制算法。在串级PID控制过程中采用DMC优化主控制器的输入参数,通过滚动优化实现任意时刻数值最优化,解决了过热蒸汽温度变化多引起的一些扰动,所导致过热蒸汽温度调节无法达到满意的效果,使得过热蒸汽温度的控制过程更加平稳。同时,经过DMC改进的串级PID控制算法可以迅速适应控制系统的动态性能,计算量小,调节时间短,超调量小,能够达到系统的实时控制要求。



3 改进算法仿真研究

4 结束语
