爬墙蜘蛛人的力学原理分析
2021-01-06郑子君陶裕梅
郑子君 陶裕梅
(重庆理工大学机械工程学院,重庆400054)
生活中常见的一些魔术道具、玩具常常蕴含着力学原理。蜘蛛人(又名爬墙超人)是一种价格低廉、制作简单、又深受广大儿童喜爱的玩具。如图1所示,该玩具由一块弹性好、表面有黏力的特殊软胶材料,穿过两块塑料外壳制成。手脚部分胶体暴露在外并呈球形,使之能够黏附在物体上。
在玩耍时,将该玩具抛向光洁的竖直玻璃面:刚开始蜘蛛人的四肢的软胶将会黏住玻璃面,使之不会掉下来;片刻后,蜘蛛人靠上方的两肢脱离玻璃面,整个玩具以下方两肢为轴旋转;脱离玻璃面的两肢再次接触到玻璃面后,又经过片刻,原来贴合玻璃面的两肢松开,开始以新的接触点为轴旋转;最终,玩具以类似翻跟头的方式不断从上往下运动,如图2所示。相关演示视频可于优酷网搜索“爬墙蜘蛛人玩具演示”。而如果将蜘蛛人抛向粗糙墙面,则玩具将紧紧贴住墙面,不会出现翻跟头的现象。

图1 蜘蛛人玩具实物照片
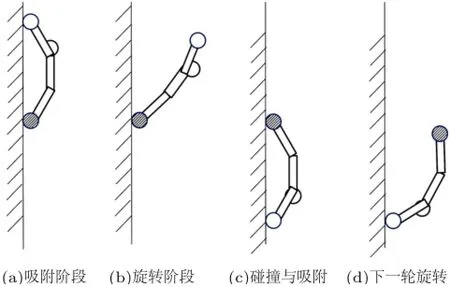
图2 蜘蛛人玩具的工作状态示意图
蜘蛛人玩具能完成翻跟斗过程,与肢稍胶球的两个重要的力学性质有关。一是胶球在压力作用下可发生较大的变形,撤去外力后,变形缓慢恢复,即表现为黏弹性[1];二是胶球可以黏在固体面上,附着力既能阻碍其与固体分离又能阻碍变形恢复,大小与接触面积正相关(如图3(a)和图3(b),胶球Q处的附着力可阻碍其回弹)。胶球及其界面的力学性能比较复杂[2],这里根据前述力学性质,利用常见力学元件来对其进行定性描述:黏弹性胶球可抽象为由弹簧K和油壶C组成的开尔文系统;而界面的附着力与挤压变形程度正相关,不妨抽象为负刚度弹簧k[3]。胶球及其界面的力学元件模型如图3(c)所示。
胶球与固体面间的摩擦系数较大,界面破坏形式主要是法向脱落。由图3(c)的简化模型可以看出,固体面上附着的胶球受到外界促使界面分离的力Fex时,有三种可能的结果:一是立即分离,当负刚度弹簧K提供的附着力不足以抵抗外力时(Fk<Fex),界面破坏,胶球脱落;二是保持稳定,当胶球在外载下变形后附着力能够同时抵抗分离力和弹簧K的回复力时(Fk≥Fex+FK),胶球既不会持续恢复变形,也不会从固体上脱落,从而能长久地附着在固体上;三是延时脱落,若附着力虽暂时能抵抗外力,但始终不能抵抗外力与弹性回复力的合力(Fex+FK>Fk≥Fex),分析图3(c)中Q处局部可知,胶球将在油壶C的阻碍下缓慢恢复变形,从而使得界面面积和附着力逐渐减小,最终与固体面分离。

图3 软胶球的力学模型
延时脱落现象可以解释蜘蛛人在玻璃上翻跟斗的原理。为简单起见,将蜘蛛人玩具视为两端各有一个胶球的关于中点对称的刚性杆。将模型在玻璃上翻跟斗的一个周期分为吸附、旋转和碰撞三个阶段:
(1)吸附阶段
此阶段玩具上端胶球A与下端胶球B均吸附在玻璃面,初始均处于挤压状态,在黏性力的阻碍下发生缓慢的恢复变形。由于变形缓慢,玩具整体可视为处于准静态状态。对玩具作受力分析,如图4(a)所示。
由模型在x方向上的受力平衡以及力矩平衡条件,容易解得FAx=-FBx=-mgh/L(各变量的意义如图4(a)所示),即A球受拉力,B球受压力。
在拉力作用下,A球的初始挤压变形能够较快恢复,与玻璃间接触面积也随之不断减小,直至附着力不能提供模型平衡时A球所需的拉力,A球从壁面脱落。反之,B球受压力作用,变形恢复较慢。因此在吸附阶段结束时,总是上方的A球先脱落,玩具开始绕下方的B球旋转。
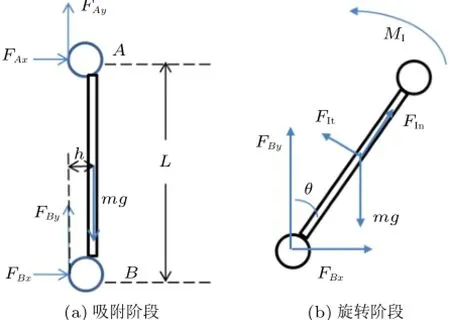
图4 模型受力分析图
(2)旋转阶段
由于此阶段相比吸附阶段历时较短,不妨认为该阶段B球在阻尼力的作用下来不及发生明显的恢复变形,因此与玻璃面间仍有足够附着力。那么整个模型可以看作是由最高点处自由释放,绕定轴B转动的复摆。运用动静法,模型的受力分析如图4(b)所示。当刚杆与竖直方向的夹角为θ时,玩具的动能由重力势能转化而来

其中J是模型相对于B球的转动惯量。质心作圆周运动的法向和切向惯性力分别为
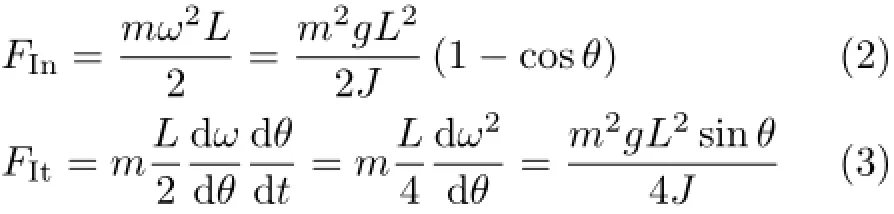
根据达朗贝尔原理,易知B处受到x向的约束反力为

式(4)在0~π之间的最大值约为0.76m2g·L2/J。因此在旋转过程中,B球与玻璃的法向附着力应当大于该值,否则B球可能脱落。
(3)碰撞阶段
经过半个圆周的定轴转动,玩具的A端再次接触玻璃壁面,与壁面发生黏弹性碰撞。模型的初动能由式(1)给出,除部分被黏性力损耗外,其余转化为A球的变形能,使得A球产生挤压变形,并与玻璃面形成新的界面。碰撞产生的挤压变形应当足够大,使对应的附着力能在下一周期的定轴转动中提供所需的支座反力。
碰撞完成后,A和B球的角色互换,系统进入下一周期。
通过以上分析可知,该玩具在设计时应当使得自最高点释放的复摆撞击能使胶球产生较大的变形;整体附着时质心到墙面应有一定距离,使上下胶球的受力差异明显。在玩耍时需要选择合适的玻璃表面:既不可过于粗糙,否则吸附阶段上方胶球受到附着力过大,将处于稳定状态而不会脱落;又不可过于光滑,否则胶球撞击玻璃形成的接触面,不能产生足够大的附着力,旋转阶段作为定轴的胶球将会受拉力脱落。实践表明,在水泥墙(太粗糙)和湿润玻璃(太光滑)上,玩具均不能实现连续翻跟斗的功能。
