一种“有无穷远虚铰的三刚片规则”的证明方法1)
2021-01-06刘亚菲舒开鸥郭子涛张雷
刘亚菲 舒开鸥 郭子涛 张雷
(九江学院建筑工程与规划学院,江西九江332005)
三刚片规则是平面体系几何组成分析的核心方法,对于规则中含有无穷远虚铰(连接两刚片的两平行链杆)的情形,往往是教学难点,由于现行教材[1-2]中均没有对这一情形详细易懂的证明,影响了学生对知识的理解。相关文献[3-4]虽给出了证明方法,但采用的是本科阶段并未涉及的射影几何知识,无助教学应用。
本文应用理论力学[5]中刚体平面运动学知识,分析了虚铰和无穷远虚铰的运动学特性,提出了两个运动学定理,在此基础上结合其他运动学基本理论,针对有无穷远虚铰的三刚片规则,给出了详细且简明的证明,方便了学生更好理解这一规则,也开拓了平面体系几何组成分析的新思路。
1 两个定理及其证明
1.1 定理一:两刚片(或其扩展部分)在虚铰处速度
相等
证明:设刚片I和刚片II的角速度矢分别为ω1和ω2,它们在O点(两刚片上或刚片的扩展部分上与虚铰位置重合的点)的速度矢分别为vO1和vO2,杆AC和杆BD的角速度矢分别为ωAC和ωBD,并设矢量AC=aOA,BD=bOB,如图1。
对刚片I和刚片II,分别以O点为基点,有


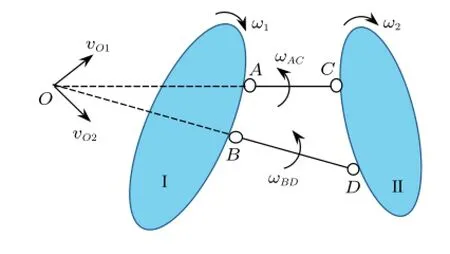
图1
对杆AC和杆BD,分别以A点和B点为基点,结合式(1)和式(2)有

式(5)减去式(3),式(6)减去式(4),得

注意到杆AC和杆BD不平行,即OA和OB不平行,若要式(7)成立,必有
此时可得:vO1=vO2,于是“两刚片(或其扩展部分)在虚铰处速度相等”成立。
1.2 定理二:无穷远虚铰(两根平行链杆)连接的两刚片,角速度相等
证明:设刚片I的速度瞬心为O点,刚片I和刚片II角速度矢分别为ω1和ω2,两平行链杆AC和BD的角速度矢分别为ωAC和ωBD,如图2。对杆AC和BD,分别以A点和B点为基点,有对刚片II,以D点为基点,结合式(9)有


式(10)减去式(8),并将BA=OA-OB和DC=BA+AC-BD代入,得

式(11)等号左侧的结果矢量在平面内垂直BA;由于杆AC和杆BD平行,故等号右侧的结果矢量在平面内垂直AC或BD,又由于BA不可能与AC或BD平行,若要式(11)成立,必有等号两边都为0,得:ω2=ω1,于是“无穷远虚铰(两根平行链杆)连接的两刚片,角速度相等”成立。
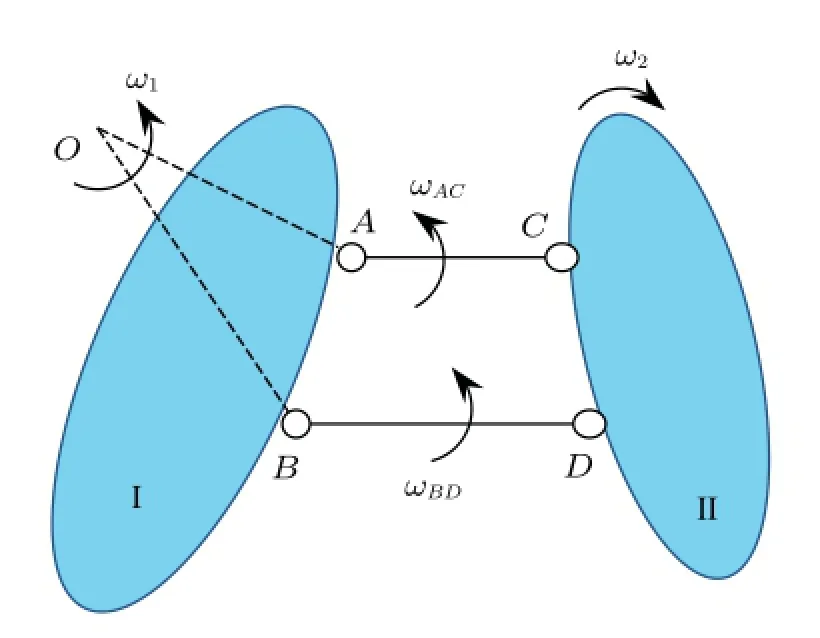
图2
2 有无穷远虚铰的三刚片规则的证明
2.1 有一个无穷远虚铰的情形
三刚片规则中,若有一个无穷远虚铰,且它不与另两铰的连线平行,规则仍然成立,即体系是无多余约束的几何不变体系,如图3。
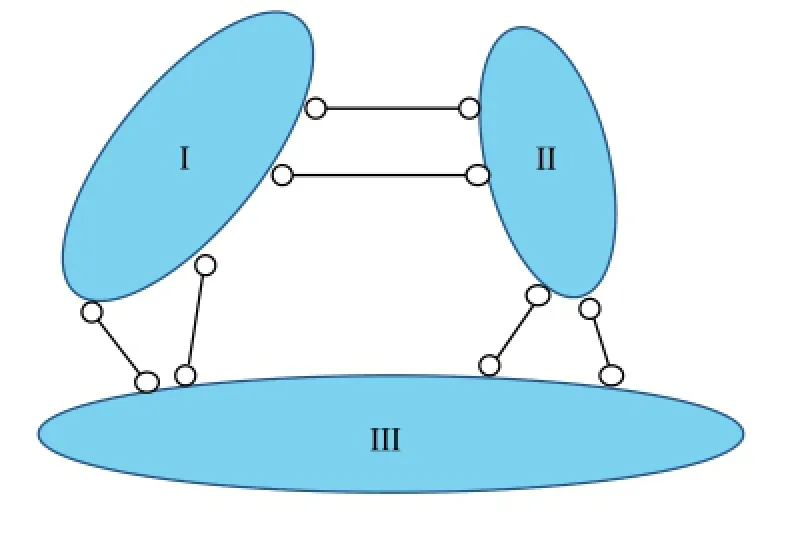
图3
证明:固定刚片III,由定理一可知刚片I在虚铰A处及刚片II在虚铰B处的速度必均为零,因此若刚片I和刚片II能动,则只能分别绕A和B转动,又因为用无穷远虚铰连接,由定理二可知刚片I和刚片II的角速度相等,设为ω,如图4。设A和B到链杆CD的距离分别为a和b,不难得出C和D两点的速度在链杆CD上的投影分别为:vCD=ω·a,vDC=ω·b。在链杆CD上根据速度投影定理,得

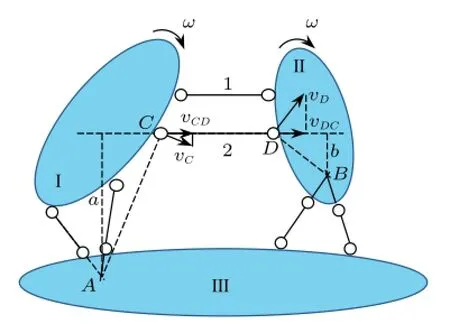
图4
考虑到链杆CD与两虚铰A和B的连线不平行,即a/=b,若要式(12)成立,只能有ω=0,这表明刚片I和刚片II均只能固定不动,即体系几何不变。
2.2 有两个无穷远虚铰的情形
三刚片规则中,若有两个无穷远虚铰,且它们不平行,规则仍然成立,即体系是无多余约束的几何不变体系,如图5。
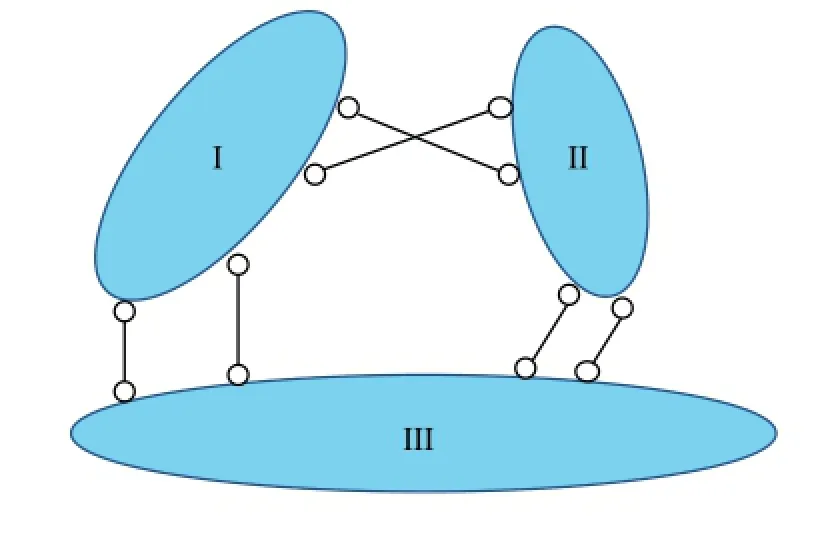
图5
证明:固定刚片III,由于与刚片III均由无穷远虚铰连接,由定理二可知若刚片I和刚片II能动,则只能分别沿垂直无穷远虚铰方向平动,设它们的速度矢分别为v1和v2,如图6。因为两无穷远虚铰不平行,故必有v1/=v2,刚片I和刚片II由虚铰A连接,由定理一知它们在虚铰A处的速度相等,即v1=v2,于是只能有v1=v2=0,这也表明刚片I和刚片II只能固定不动,即体系几何不变。

图6
2.3 有三个无穷远虚铰的情形
三刚片规则中,若连接三刚片的三个铰均为无穷远虚铰,则体系是几何可变体系,如图7。
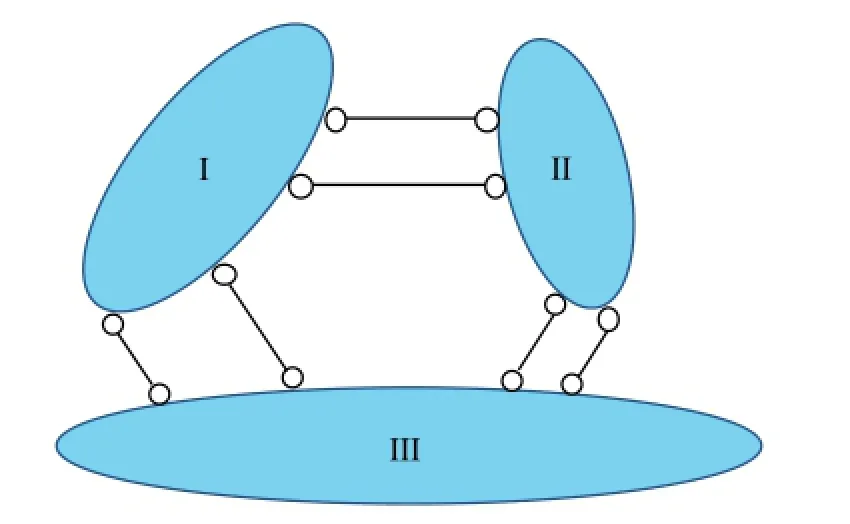
图7
证明:固定刚片III,由于与刚片III均由无穷远虚铰连接,由定理二可知若刚片I和刚片II能动,仍只能分别沿垂直无穷远虚铰方向平动(即两刚片角速度均为0,自然满足定理二),设速度分别为v1和v2,如图8。此时只要v1和v2沿连接刚片I和刚片II的无穷远虚铰方向上的分量相等,即满足速度投影定理,于是v1和v2可不必都为0,这表明刚片I和刚片II至少有一个可动,即体系几何可变。
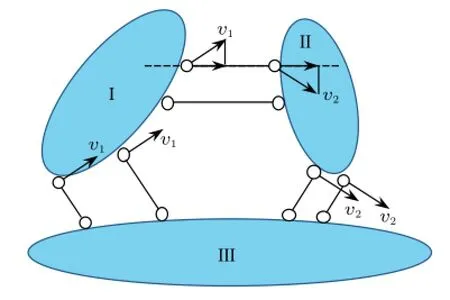
图8
3 结语
本文利用理论力学中刚体平面运动学知识,解决了结构力学中有无穷远虚铰的三刚片规则的证明问题,不仅使结构力学知识更易于理解、掌握,也直观体现了理论力学基础知识在力学学习中的意义与价值,还为力学教学中各课程的交叉融合提供了很好示范。
以本文对有无穷远虚铰的三刚片规则的证明为启发,在平面体系尤其是复杂体系(不能用两刚片规则或三刚片规则等基本方法分析的体系)的几何组成分析中,可尝试建立基于刚体平面运动学基本理论的新的分析方法。以图9的复杂体系为例[6],简要说明这一分析方法。

图9
体系中A、B和C三点是固定不动的,若体系可变(即可动),则杆AD、BD和CG只能分别绕点A、B和C转动,假设D点速度vD向下,则点E和F速度vE和vF均向下,如图10。在杆EG上利用速度投影定理,可知点G速度vG向右,再在杆FG上利用速度投影定理,得根据式(13)不难得到vD和vE均为0,于是各结点均固定不动,即体系几何不变,求出体系的计算自由度为0,所以该体系为无多余约束的几何不变体系。

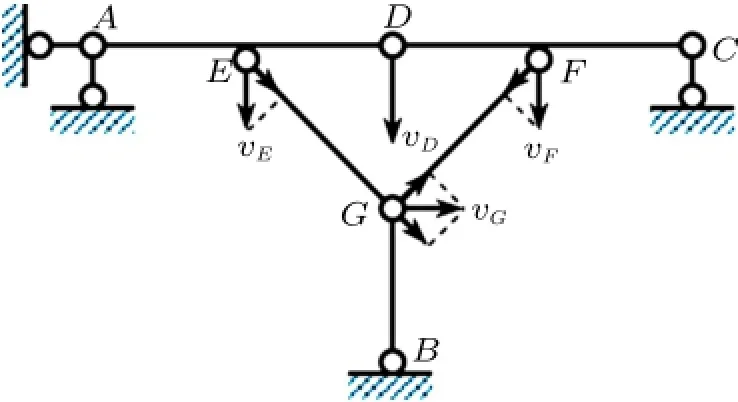
图10
