飞机方案设计阶段机动载荷快速计算方法研究
2021-01-06张建刚何康乐金鑫
张建刚 何康乐 金鑫
(中国航空工业集团公司第一飞机设计研究院,西安710089)
一架飞机从起飞到着陆全过程无时无刻不在承受着载荷,包括空气动力载荷和自身的惯性载荷。合理确定飞机载荷是飞机结构强度和系统设计的基础。如果给出的载荷小于实际情况,则容易发生飞行事故,反之则飞机重量增加影响性能。因此,合理确定载荷非常重要。机动载荷在飞机设计载荷里面占相当大的比例,大部分结构都是依据机动载荷设计的。同时飞机设计也是一个反复迭代,逐次逼近的过程。方案阶段主要是设计出可行的飞机总体技术方案。飞机总体设计的工作量,在论证和方案阶段虽然只占研制工作量或费用的20%~30%,但对飞机设计方案的技术可行程度却占70%~80%[1]。因此方案阶段对设计新飞机的成功至关重要。
飞机在方案设计阶段,各个专业都在快速迭代。每次迭代过程中结构强度专业都需要一轮初步的设计载荷,用以对主要的受力部件进行初步设计和分析、传力路线分析、方案评估等。因此方案阶段载荷计算有两个主要特点:(1)要求计算过程简单迅速,对每一种方案都能快速给出结果;(2)对计算输入的要求不能太严苛。采用传统方法在方案阶段计算机动载荷有一定的困难,因为传统方法计算需要大量的由风洞试验得到的气动特性数据和压力分布数据,这些数据在方案阶段很难完备。同时,因为是在方案阶段,对载荷的具体数值大小精度的要求并没有详细设计阶段那么高。因此需要针对方案阶段载荷计算的特点,发展出适合于该阶段使用的载荷计算方法。
军、民用飞机的载荷计算都是以相应的规范作为依据。军用飞机飞行载荷的设计依据是军用飞机的强度和刚度规范。随着军用飞机设计技术的不断发展,军用飞机的强度和刚度规范也不断更新。美国从60年代使用的MIL-8861A,现已更新为MILA-87221[2],这和他们的飞机设计技术密切相关。我国在1986年以前一直使用的强度规范是50年代的《飞机强度规范(试用本)》,在1986年国防科学技术工业委员会颁布了我国新的军用飞机强度和刚度设计的规范--GJB67.1-1985《军用飞机强度和刚度规范》(以下简称国军标)[3]。该规范的特点是,它要求在载荷计算中尽可能真实地模拟飞机实际飞行情况,给出真实的飞机载荷。
本文针对上述的方案阶段载荷设计的特殊性,以某中型飞机方案阶段平尾载荷计算为例,综合利用静气动弹性、空气动力学和飞行力学等理论,提出了一种可以在方案阶段克服传统方法不足、满足国军标要求的较为简捷的计算方法。基本思路是利用静气弹理论计算出飞机的各个气动导数,然后进行机动模拟得到飞行参数及部件总载,最后采用涡格法计算出各部件的分布气动载荷。该方法需要较少的输入参数,能较为简便地计算出机动载荷,供方案阶段飞机设计使用。
通常按照规范进行机动载荷计算有两大步骤。首先将规范中的要求抽象为一定的物理模型,并通过数学方法对此物理模型进行描述,求解这些数学问题就解决了载荷计算中的第一大方面的问题:机动模拟中各部件的总载荷。其次,尚需求解第二大方面的解,即通过测压试验或理论计算求解出这些总载荷的分布[4]。传统方法这两步都需要风洞试验来得到气动特性数据、气动压力分布数据。
1 气动导数计算
计算气动导数之前首先需要建模。按照气动弹性通常的做法,将飞机的机翼尾翼等气动面简化为升力面。因为在方案阶段没有准确的刚度数据,并且该阶段的载荷计算也不必采用弹性模型,飞机结构按刚性简化。以飞机重心为坐标原点,逆航向为X轴建立机体坐标系。
在通常的静气弹分析中,忽略结构弹性变形的惯性力,分析自由度a集下的静气弹方程

式中,Kaa是结构刚度矩阵,qd是速压,Qaa和Qax是气动力影响系数矩阵,ua是a集自由度的位移,Maa是结构质量矩阵。在式(1)中,如果忽略结构弹性变形引起的气动力,经过推导后[5-6]可得到

式中,ux是配平变量,R是与刚体模态向量和气动力影响系数有关的矩阵,ur是ua中的刚体自由度部分,¨ur是支持点处的代表刚体运动的加速度,刚体运动的加速度分别为¨ur=(¨x¨y¨z˙p˙q˙r)T,ux=(αβp q rδ)T,¨x,¨y和¨z分别表示纵向、侧向和垂向垂直加速度;˙p,˙q和˙r分别表示滚转角加速度、俯仰角加速度和偏航角加速度,δ包括副翼、升降舵和方向舵偏角等。
根据气动导数的定义并利用刚体质量矩阵Mr,得到刚性气动力F和配平变量¨ux之间的关系

通过对各变量求导,即可得到各气动导数。
对于马赫数小于1的情况,使用偶极子格网法,通过静气弹计算,得到各个气动导数。计算了不同马赫数下的主要的气动导数,如表1所示。
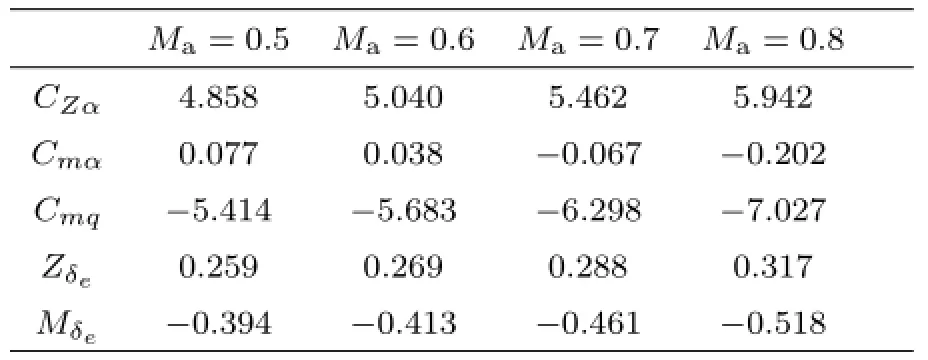
表1 不同马赫数下的气动导数
对表1中的结果进行分析并与类似飞机的数据进行比较,可以发现各个气动导数的数值及其变化趋势与气动规律较为符合,可以用于下一步的计算。
2 机动模拟计算
对常规布局飞机的机动载荷,尾翼载荷的计算比较有代表性。因为当飞机的设计重量和设计载荷系数确定后,基本就确定了机翼和机身的载荷[7],因此如果确定了尾翼载荷,就很容易确定一架飞机总体载荷。因此以平尾载荷估算为例进行计算。平尾载荷的主要设计情况是急剧俯仰,下面以该机动模拟为例。
规范是这样规定急剧俯仰机动的:在该机动规定的速度下,飞机初始应处于稳定非加速飞行状态,并将操纵力配平为零。在达到规定的载荷系数之前,速度一直保持不变。急剧俯仰机动的初始状态为飞机过载等于1的稳定水平直线飞行。在配平飞机后,升降舵以操纵系统所能提供的最大可用速率偏转,升降舵偏转剖面由在整个偏转历程中飞机法向过载等于设计过载来确定。如果飞机座舱操纵运动采用图1实线所示的三角形位移-时间曲线能够使飞机达到规定的载荷系数,则采用这种操纵运动;否则,采用图1虚线所示的梯形操纵运动。图中t1应取飞机实际可达到的值。在速度VA时,在梯形操纵运动情况下t1可取零,以获得最大的俯仰角加速度。
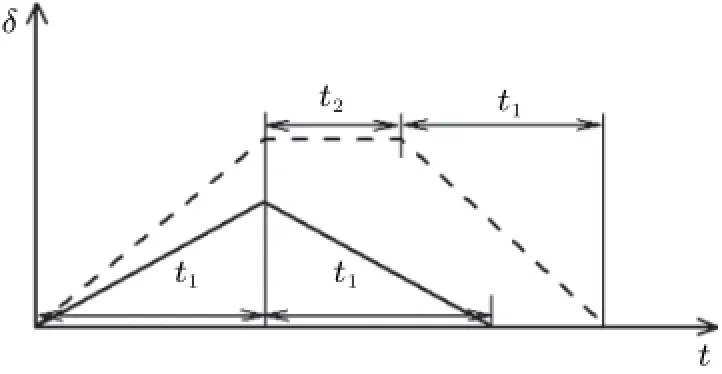
图1 座舱纵向操纵位移-时间图
对上述机动模拟计算要求可抽象为飞机线性小扰动的纵向短周期运动方程,依据国军标GJB67A-2008第二部分飞行载荷中的3.2.1.4条中要求,给定升降舵的输入,这里升降舵的偏转速率为55(°)/s,忽略了从座舱操纵到舵面偏转的传递过程[8]。飞机运动方程为


其中对飞机运动方程,采用4阶R-K方法求解式(4)[9],得到各个运动参数的时间历程。图2是高度6000 m,Ma=0.8时机动模拟得到的各参数的时间历程。
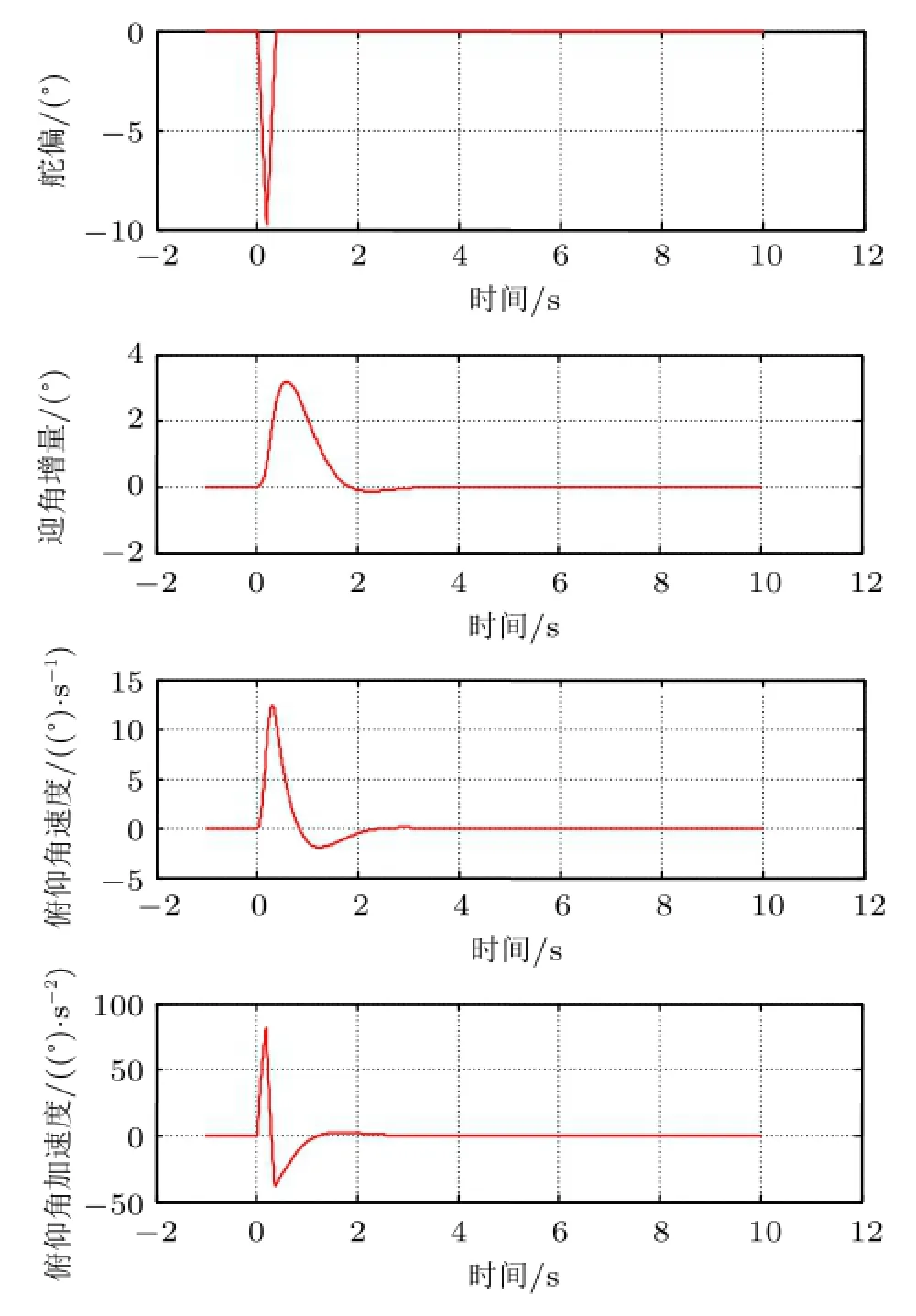
图2 急剧俯仰各飞行参数时间历程

图2 急剧俯仰各飞行参数时间历程(续)
通过将上述的飞行参数的时间历程与之前类似飞机详细设计阶段相关参数进行对比,可以看出其变化规律比较合理。
3 分布载荷计算
空气动力单元上的空气动力为

对于静气弹来说,下洗关系式为

式中,Wj是下洗列阵;Djk是关于空气动力位移的物质导数矩阵;uk为空气动力网格点位移;ux是空气动力配平变量;如迎角、侧滑角、滚转速率和舵面偏转角等;Djx是关于空气动力配平变量的物质导数矩阵;Skj是积分矩阵;Ajj是内部空气动力影响系数矩阵。式(5)的意义是这样的:按照线性空气动力学理论,主要是建立下洗与涡强分布之间的关系,矩阵Ajj就是将二者联系起来。Ajj的计算采用涡格法按照毕奥-萨伐定律计算[10]。将第2节计算得到的飞行参数代入式(5),即可计算出各部件的气动载荷,同时还需要计算惯性载荷。有了飞行参数后,结合飞机的惯性数据,根据达郎贝尔原理较容易计算[11],本文不再赘述。
需要指出的是,实际工程中的载荷计算需要考虑飞机的各种重量、重心、气动构型、速度和高度等各种不同构型,并且有若干种机动类型,计算情况会有很多种。本文中的计算只是列举急剧俯仰机动中的一个工况。
4 结果对比
由第2节得到的飞行参数可以得到平尾的总载荷(以下称估算载荷),挑选出所有计算工况中平尾载荷最大的工况,将其与3个月后用传统方法计算得到的载荷(以下称详细载荷)数值进行对比,如表2所示。
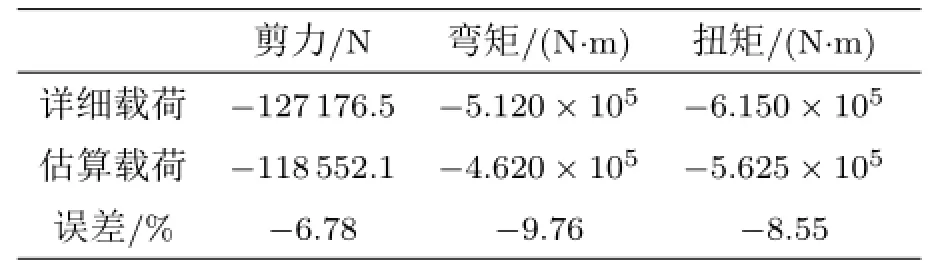
表2 单侧平尾估算载荷与详细载荷数值对比
由第3节的方法可以得到部件的分布载荷,进而可以得到剪力、弯矩和扭矩沿翼面展向的分布。将平尾载荷最大工况的弯剪扭分布与详细载荷进行对比,如图3所示。
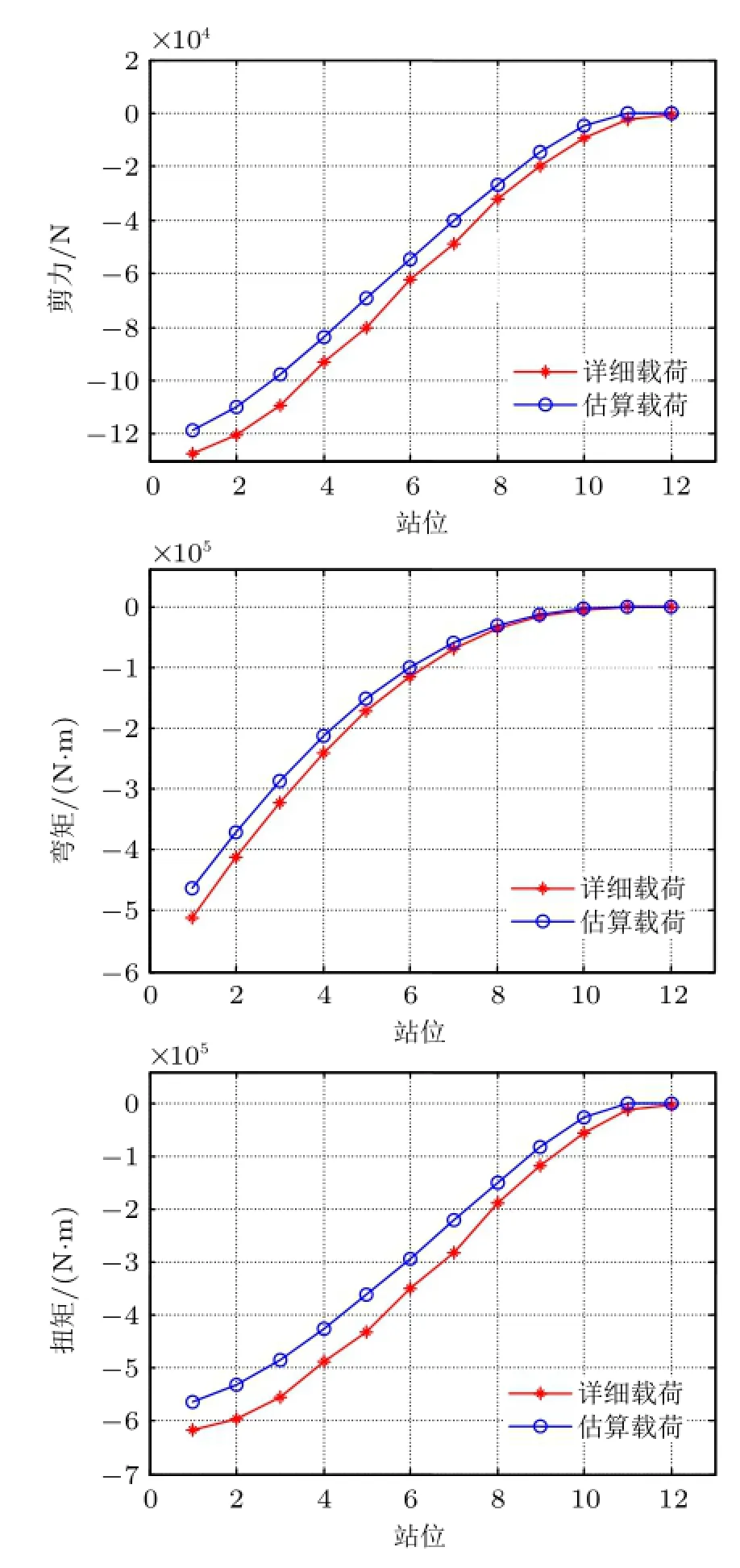
图3 单侧平尾估算载荷与详细载荷弯剪扭对比
从表2和图3可以看出,估算载荷的总载和分布与详细载荷相比,误差都不超过10%,这样的精度是完全满足飞机在方案阶段的载荷需求的。
5 结论
本文提出了一种可以在方案阶段快捷计算飞机机动载荷的方法和流程,应用到的气动导数计算、机动模拟计算和分布载荷计算等都是成熟的理论,但是这些内容在飞机设计中属于不同的专业和部门。本方法克服了传统方法须在多专业之间反复沟通协调因而费时费力的缺点。该方法的主要特点是:(1)需要输入的主要数据是飞机外形,重量重心等,数据较少,受限制少;(2)计算过程简单快速,能适应方案阶段快速迭代的要求;(3)计算结果精度能满足方案阶段的要求。本文中使用了理论的方法计算了气动导数和气动力分布,如果有更为可靠的数据,则可以直接使用这些数据。并且气动力的分布可以使用更为精确的计算方法。经过在多个型号中使用验证,该方法计算结果较为可靠,精度满足方案阶段结构强度设计的需要。应用本方法,可以显著节约时间,加快研制进度。
