工业机器人基础教学实训设备开发探究
2021-01-06嘉兴技师学院虞嘉丞
嘉兴技师学院 虞嘉丞
工业机器人相关专业是近几年新兴专业,发展极其迅速,人社部于2009 年技工类专业中开设“工业机器人应用与维护”专业,教育部研究确定在2019 年起增补并开设“工业机器人技术应用”专业。
我校自2013 年开设“工业机器人应用与维护”专业以来,已经历了7 个年头,期间辛苦与收获并存,特别是开设伊始,缺乏师资,更缺乏教学实训设备,经调研后,我校决定自己开发相关实训设备。
1 设备教学定位
我校是技师学院,中职院校,学制5~6 年。人才培养定位在“应用”与“维护”两个方面,“应用”主要是简单编程、调试等工作,“维护”则是保养、维护等工作。
2 设备功能需求
根据设备的教学定位,调研现在工业机器人主要的功能应用,经过互联网大量文献及数据对比,取中国产业信息网公布的《2018 年中国工业机器人市场规模预测及行业发展趋势》一文中“2013-2017 年中国工业机器人应用行业分布”图为典型结果[4],可知搬运码垛机器人、焊接机器人各占比超过35%,装配机器人占比15%以上,其他应用加一起也不足15%。
由以上调研,主要引入搬运码垛、焊接、装配三大应用功能,其他功能省略。
3 工业机器人选型
工业机器人品牌繁多,操作系统又不相同。作为基础教学实训设备,我校考虑的出发点是市场占有率相对较高,中职院校又主要给本地企业输送技能人才,所以本地企业使用相对多,教学资源又相对丰富的作为首选。经过调研,以搜狐网刊登数据,机器人四大家族的占有率[5],再根据地方企业使用中ABB 使用率也较高,而ABB 的教学资源及软件相对其他品牌丰富很多。最终决定使用ABB 机器人。
因安全及设备尺寸等综合考虑,所以具体型号选择IRB-120,具体参数为公开资料,不再赘述。
4 设备具体设计
具体设计搬运码垛、平面空间轨迹、搬运装配三大功能模块,用以覆盖搬运码垛、焊接、装配三大应用功能。
4.1 搬运码垛功能模块
搬运码垛模块主要对应机器人搬运及码垛相关应用,设计为由9 块叠放物料及一个栈板组成,可以完成一层,放置三层的基础码垛,也可以完成叠放平铺的搬运动作。设计及实物如图1。
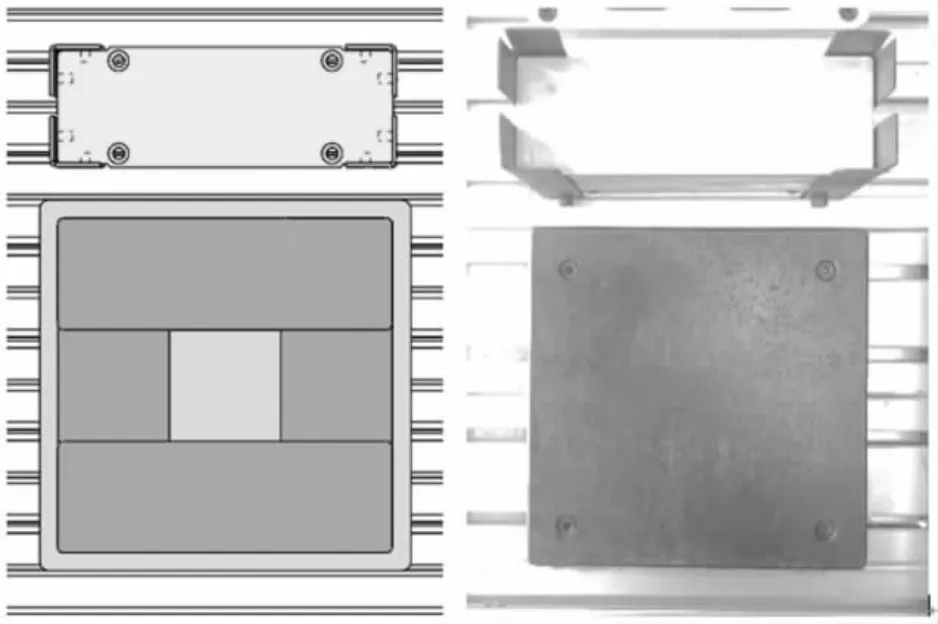
图1 搬运码垛模块设计图及实物图
4.2 平面空间轨迹功能模块
平面、空间轨迹模块,主要是针对工业机器人焊接、涂胶等相关应用,设计为平面直线、圆弧轨迹6 个,空间轨迹2 个,可以完成机器人基本运动指令方面的训练,以及工件坐标系定义。设计及实物如图2 所示。
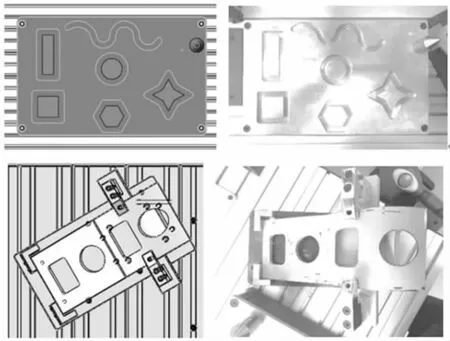
图2 轨迹模块设计图及实物图
4.3 搬运装配功能模块
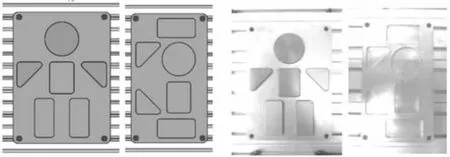
图3 搬运装配模块
搬运装配模块主要是针对工业机器人装配相关应用,设计了6 个不同形状的物块,并设计了两个位置不同的相应形状托盘,物块搬运后必须嵌入托盘中,完成简单装配。设计及实物如图3所示。
4.4 工具坐标系定义锥座
工具坐标系需要专门的锥座才可以精确定义,所以在平面轨迹盘边上设计了锥座。
4.5 多种末端执行器
为了配合各种应用,设计了多种末端执行器,有轨迹笔用于焊接、涂胶应用;有吸盘用于搬运、码垛、装配;有夹抓用于搬运、码垛。
有了以上各种设计,本基础教学实训设备总体外形如图4。
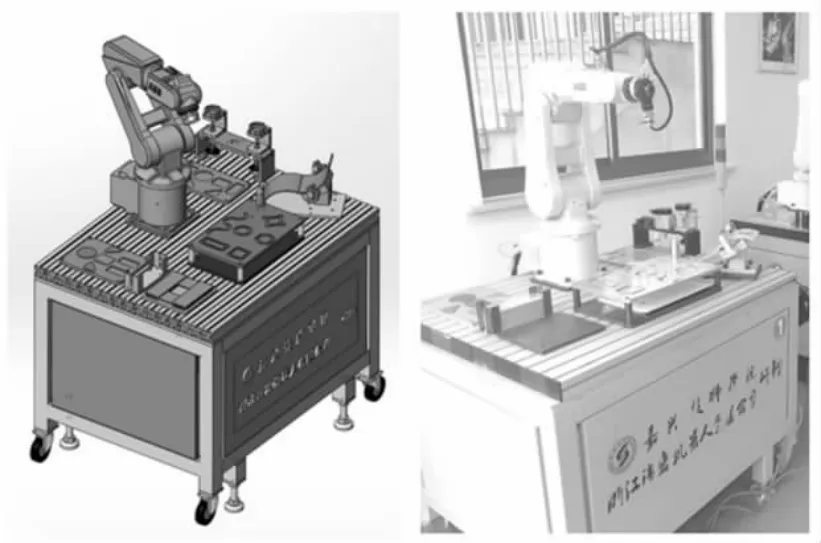
图4 整机设计及实物图
5 设备使用情况
我校工业机器人教学实训中心从2015 年启用以来,主要投入到“机器人基础训练”“中德机器人项目训练”“综合训练”“FMS柔性自动化训练”等课程中,并且从2013~2018 级学生的教学使用中,贯穿于入门到进阶课程,达到了满意的效果。
6 结语
综上所述,本次工业机器人基础教学实训设备开发是成功的,在我校工业机器人应用与维护专业的教学中承担了重要角色,特别是针对每一届刚接触工业机器人的学生起到了相当重要的作用,并且在后面的进阶教学中,作用依然非常突出。
