电动缸在P&H2800XPB电铲登机系统中的应用
2021-01-05刘世雄
孟 平,刘世雄
(国家能源集团准能设备维修中心,内蒙古鄂尔多斯 010300)
P&H2800XPB 电铲是安家岭露天矿剥离岩石和坑下煤炭开采的主力军[1]。电铲作业前必须将登机梯升起来,否则电铲设备无法正常工作,登机梯是否正常运行直接决定着电铲能否顺利启动,开展工作。而安家岭矿内服役的P&H2800XPB 电铲登机梯都是依靠空气系统来控制的。步入冬季后,设备登机梯系统开始经常性地因为气路管路的水汽形成积水,再遇冷冰冻堵塞管路,造成登机梯无法正常工作;气动控制系统由于恶劣环境等因素的影响,高压气体流动极不稳定,高压气体流动急促时,常出现梯子撞击电铲平台和梯子电磁限位阀的现象。高压气体流动不畅,气流较小时,会出现登机梯不归位,悬浮半空。而电动缸能精准控制速度和提供有效载荷马力,因此提出电动缸代替气缸给登机梯系统提供动力,如果电动缸替代气缸给登机梯提供动力源的方案可行,则这些故障就不存在了[2]。
1 登机梯空气控制系统和气缸系统
登机梯空气控制系统包括空气系统部件和气缸,该系统通过气动方式升起和降下登机梯。压缩空气从空压机出来,可以到达气动控制阀,操作人员可分别从电铲和地面上,操作手柄和拉绳控制登机梯。该系统由气压调节器、过滤器、气压流量控制阀、空气导向阀、拉绳、手动触动器、气管等组件构成。
气缸系统是通过流经电磁阀或气动控制阀的气流来控制气缸作伸缩动作,由于高压空气的不稳定性,气缸难以精密控制。而且需要流量阀控制梯子快慢,整套组装下来结构也较复杂。气动缸的气动密封是关键的部分,密封圈极容易老化磨损,使用寿命因环境和频率决定,而电铲现场工作环境比较恶劣,气动缸的寿命也在大大降低,维修工作量自然增加,维修成本增大。气动缸系统控制的登机梯,进入冬季经常性地因为气路管路里的水汽聚集形成积水,再遇冷冰冻堵塞管路,致使登机梯无法正常工作,造成设备故障;冬季因天气严寒,这种故障频繁发生而且依靠现有条件无法根治,设备会反复发生类似故障,车间维修人员劳动强度因此大大增加[3]。
2 电动缸工作原理及特点
2.1 电动缸的结构和工作原理
电动缸控制比较方便,工业设备上应用很多,比如开门,升降,推拉,推力从102~106N 都可以做到。内部结构为行星滚柱丝杠,滚柱丝杠,梯形丝杠,防反转装置[4]。
电动缸是伺服电机与丝杠一体化设计的模块化产品,将伺服电机的旋转运动转换成直线运动,同时将伺服电机最佳优点-精确转速控制,精确转数控制,精确扭矩控制转变成-精确速度控制,精确位置控制,精确推力控制[5]。电动缸的安装方式有法兰式,销孔式(单耳双耳),螺纹端,可以与电机平行,垂直,直线,安装方式非常灵活,并可以连接各式附件,结构紧凑,且很方便与PLC 等控制系统连接,实现高精度控制。
2.2 电动缸的特性和优点
1)可精密控制推力,控制精度可达到1%(控制精度指反馈控制系统中最终的控制参数值与额定值的符合程度,即余差)。
2)很容易与PLC 等控制系统连接,实现高精密运动控制。
3)噪音低,节能,干净,高刚性,抗冲击力强,超长寿命,操作维护简单。
4)电动缸工作环境温度较广为-40~120 ℃,适于北方高寒、高冷地区作业使用。电动缸可在恶劣环境下作业无故障,防护等级可以达到IP66。
5)维护简单方便,电动缸在复杂的环境下工作只需要定期的注脂润滑,并无易损件需要维护更换。
电动缸跟液压缸和气缸相比,不需要液压源和气源,只要给普通的交流电,控制伺服电机的运动就能控制电动缸的运动了。可实现环保、节能、干净的优点,所以电动缸作为液压缸和气缸的替代产品,在电铲登机梯系统中极具应用推广价值。
2.3 电动缸的选型计算
电动缸主要来承受沿推杆方向的轴向负载,可产生轴向的拉力和推力、对于径向负载(即垂直于推杆方向的负载),承载较小,并且随着推杆的伸出而降低。推杆全都伸出时,侧向承载最小[6]。

式中:Fa为推杆最大推力,N;T 为输入电机矩,N·m;L 为丝杠导程,m;A 为减速比;η 为传动效率,0.90~0.95。
登机梯通过电动缸的推杆,轴向作用于登机梯一端的配重块。通常设备平台高处的电动缸推杆推出最长时,推杆作用于配重块的推力使登机梯保持在与电动缸同一水平高度,此时登机梯电磁阀闭合,反馈到设备控制系统,设备可正常工作。相反,当有工作人员等需要上下电铲设备时,手动操作电动缸控制按钮或拉线,电动缸推杆收缩,作用于登机梯配重块的力减小,登机梯依靠自重,梯子另一端缓慢下降,直至另一端降到地面,人员便可爬梯上下设备。此时登机梯电磁阀常开,电铲设备不能进行挖掘等作业。登机梯受力分析图如图1。

图1 登机梯受力分析图
图1 中LAB为登机梯整体的力矩长度,m;A 为登机梯可升降一端,BC 端为登机梯配重端,电动缸推杆推力F 作用于登机梯配重端BC,G 为登机梯自重[7],N;O 为登机梯升降过程中移动的重心,L1、L2为垂直地面方向的力臂长,m。
根据杠杆原理知:

设备登机梯质量约为1.5 t,登机梯降到地面时,F 最大力为自重的1.5 倍,则杠杆推力F>31 183.4 N 的电动缸即可满足要求。
3 气缸系统和电动缸系统对比
3.1 气缸的工作原理
空气系统控制气缸图如图2,空压机压缩空气,气体经过几道过滤装置,然后流到登机梯气动控制阀,通过拉绳阀或者手动控制阀对登机梯气动阀作用,进而控制登机梯的升降;梯子完全升起,梯子端的接触铁片与电子阀接触,电磁阀吸合,反馈到控制系统,再经过控制系统,梯子定位信号传输至驾驶室PC 端,驾驶室人员可以通过PC 端,直接获取登机梯的停留状态。电磁阀未吸合不工作,即为梯子未起到位或者梯子处于落地状态。

图2 空气系统控制气缸图
3.2 电动缸的工作原理
交流电源控制电动缸图如图3,电铲电路分流出来的220 V 电源连接到电机控制器,电机控制器直接控制电动缸的伸缩动作(电机控制器通过连接线路将开关接到拉绳和手动控制阀),进来控制登机梯的升降。梯子完全升起,梯子端的接触铁片与电子阀接触,电磁阀吸合,反馈到控制系统,再经过控制系统,梯子定位信号传输至驾驶室PC 端,驾驶室人员可以通过PC 端,直接获取登机梯的停留状态。电磁阀未吸合不工作,即为梯子未起到位或者梯子处于落地状态。
3.3 气缸和电动缸的对比
1)电动缸系统结构设计更为合理简单。电动缸工作时性能更加稳定,能实现高强度、高精度定位,梯子不归位现象将极大地降低。
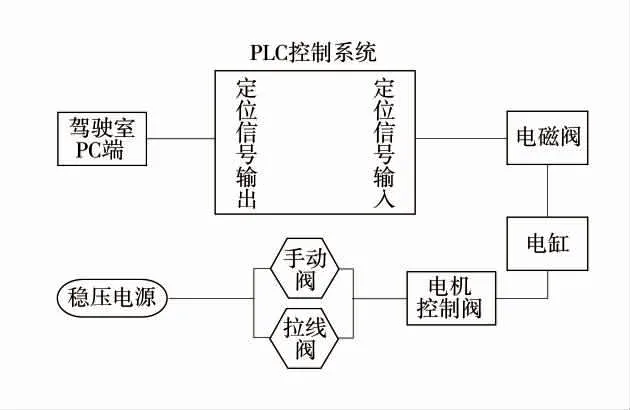
图3 交流电源控制电动缸图
2)电动缸故障率低。气缸系统冬季气路堵塞的情况频繁发生,设备故障率较大;而电动缸系统可在较复杂、较恶劣的环境下作业,避免前者的情况,大幅度减轻和减少了冬季工作人员的劳动强度和工作量,降低了工作的重复性,提高了设备的经济效益。
3)电动缸控制性能好。气缸系统中气缸活塞运动速度较快时,在行程的末端将会猛烈撞击气缸的前后端盖,气缸内有橡胶垫儿会起到一定缓冲作用,但是运动中的梯子没有缓冲装置,往往会猛烈撞向电铲平台,梯子限位电磁阀经常被撞坏;而电动缸通过微处理器实时检测位置,精确控制其速度的大小。当运动到端部位置时迅速降低其运行速度,实现终点缓冲控制,避免撞击现象发生。
4)电动缸作业的安全性好。电动缸后期维护简单且成本较低,只需注脂润滑;而空气系统控制装置得查看梯子气动阀的正常与否,及时排除气动阀内的积水,查看整套装置是否漏气,工作量大,安全注意事项多,操作起来较为繁杂。相对的电动缸系统能有效地改善现场电铲设备维护作业的安全条件。
4 改造前后故障分析
安家岭矿7 台PH2800XPB 电铲,进入冬季,因登机梯气缸装置故障停机时间增多。登机梯系统改造前,登机梯气缸装置故障停机时间统计,将气缸密封零部件老化漏气,造成设备低气压、登机梯气动控制阀出来到气缸的管路出现结冰,气管堵塞有关的故障都统计为登机梯气缸装置故障。
登机梯控制系统为气缸时故障停机时间统计表见表1,登机梯系统改造前登机梯控制系统为气缸,故障停机时间统计周期以2018 年11 月—2019 年4月,共计6 个月,每个月单独跟踪的平均每台铲登机梯气缸装置故障停机时间,每月以30 d 计算,然后通过跟踪的平均每台铲登机梯气缸装置故障停机时间总和,得出月平均和天平均每台铲故障时间。

表1 登机梯控制系统为气缸时故障停机时间统计表
登机梯控制系统为电动缸时故障停机时间统计表见表2,登机梯系统改造后登机梯控制系统为电动缸,故障停机时间统计周期以2019 年11 月—2020 年4 月,共计6 个月,每个月单独跟踪的平均每台铲登机梯气缸装置故障停机时间以30 d 计算,然后通过跟踪的平均每台铲登机梯气缸装置故障停机时间总和,得出月平均和天平均每台故障时间[8]。

表2 登机梯控制系统为电动缸时故障停机时间统计表
由表1 可以得出,按照每月30 d 计算,每台铲每天停机时间为3.5 h;由表2 可以得出,每台铲每天停机时间为0.5 h(30 min),可见改造后因登机梯动力装置停机时间缩短到原来的0.142,粗略估计每台铲创造经济效益为4 万元/d,每个月至少可多创造17.5 万元,节省了维修成本的同时极大降低了安全风险。
5 结语
1)P&H2800XPB 电铲登机梯控制系统改为电动缸系统后,电铲设备因登机梯系统引发的故障时间平均每天缩短3 h,可以减轻工人的劳动强度以及工作量。
2)通过改造电铲登机梯控制系统,冬季因登机梯系统故障减少,随之而来的生产及经济效益十分可观,每月每台电铲可以多创造经济效益17.5 万元,为企业的持续高效发展提供了有力保障。