高空风力发电发展现状及关键技术研究综述*
2021-01-05毛虹霖方子淇
邵 垒,毛虹霖,邢 胜,利 威,方子淇,侯 洋
高空风力发电发展现状及关键技术研究综述*
邵 垒†,毛虹霖,邢 胜,利 威,方子淇,侯 洋
(重庆交通大学 航空学院,重庆 400074)
高空风力发电系统(AWES)主要通过采用系留航空器在一定高度下捕获稳定的风能并将其转化为电能,具有低成本、高效率、无污染等优势,近年来受到较大关注。本文介绍了几种AWES技术的基本原理、发展历程以及应用现状,并对几种AWES技术的结构特点、发电成本等进行了分析和比较,以期为我国未来发展AWES技术提供参考。
高空风力发电;高空风能;系留航空器
0 引 言
大力发展可再生能源已成为世界各国寻求可持续发展的重要途径和培育新的经济增长点的重大战略选择。国家能源局数据显示,2019年我国风电累计装机2.1亿kW,风电发电量4 057亿kW∙h,约占全国全部发电量的5.5%,且呈逐年上升趋势[1-2]。目前,国内外的风能利用以低空风能发电为主,虽然低空风力发电获得了快速的发展,但是仍然存在较多问题:①低空风能易受季节气候、地理位置、地表环境以及人类活动等因素的影响,存在分布不均、风力不足等问题,直接影响发电效率和发电量;②低空发电技术占地面积大、噪声污染严重,建设成本和管理维护费用都相对较高;③气流瞬息万变,风的脉动、季节变化十分明显,波动很大。风电的不稳定性给平稳供应带来困难,时断时续的供应也会缩短线路的寿命,电能运输消耗方面存在较大的难点[3-5]。
近年来很多国家开始研究高空风能发电技术,该技术主要利用距离地面约500 ~ 12 000 m之间的风能进行发电。ARCHER等[6]对世界范围内海拔与风能资源分布关系进行研究时发现,海拔高度每增加1 m,风能密度增加0.25 ~ 0.37 W/m2,当高度为500 m时,平均风能密度约225 W/m2,约为地面风能密度的2倍;当高度在1 000 m时,风能密度能达到500 W/m2,约为地面风能的5倍。我国高空风能主要集中在经济发达的华东地区,当海拔高度在10 000 m时,其最高风能密度甚至能达到10 kW/m2,约为地面风能的100倍[7]。根据全国900多个气象站数据进行估算,全国平均风能密度仅为100 W/m2,说明高空风能具有巨大的开发价值[8]。
实现高空风能发电的主要技术是高空风力发电系统(airborne wind energy system, AWES),即采用系留航空器达到传统风力发电机无法达到的高度,在此高度下捕获稳定的风能并将其转化为电能。事实上,国外早在20世纪70年代爆发能源危机时,各类AWES的设计就不断涌现,发达国家对高空风能发电的研究从未停止,美国、荷兰、意大利等国都多次进行过高空风能发电试验[9-11]。目前,全球已经超过50家高空风能发电公司,注册了数百项专利,开发了许多样机和示范区,世界各地的数十个研究小组目前正在研究包括控制、电子和机械设计的技术问题,其中最具代表性的有三类技术:①系留风筝式AWES技术,代表性公司有KiteGen、SkySails Power、KitePower等;②系留飞行器式AWES技术,代表性公司有Makani Power、Sky Wind Power、、对Conference, Ampyx Power等;③系留浮空器式AWES技术,代表性公司有Altaeros Energies。
目前国内还没有针对AWES展开深入研究,在技术上和国外存在一定差距。鉴于此,本文在分析三类AWES技术基本原理、发展历程以及国内外应用现状的基础上,深入研究不同技术的特点和适用特性,剖析AWES技术的难点,并对其进行分析和比较,以期为我国AWES总体方案设计提供参考。
1 系留风筝式AWES技术
系留风筝式AWES技术目前有两种方式实现:①滑翔伞式系留风筝,即通过控制滑翔伞在高空按特定的“8”字型或者“圆形”轨迹运动从而拖动系留绳,并通过系留绳的牵引作用使发电机发电,其原理如图1a所示。②伞梯状系留风筝,即通过控制伞梯状系留风筝开闭,实现风筝上下循环运动,进而拖动发电机发电,其原理如图1b所示。

图1 系留风筝式AWES原理图:(a)滑翔翼系留风筝;(b)伞梯状系留风筝
Fig. 1 The schematic of tethered kite AWES: (a) hang-glider moored kite; (b) umbrella ladder moored kite
1.1 滑翔伞式系留风筝
意大利KiteGen公司自21世纪初以来一直是风筝发电的先驱,其开发的AWES如图2a所示,该系统不仅具有发电效率高的优势,而且占用的空间和面积也非常小,9个风筝发电机组成的一个风电场占地面积为0.025 km2,总功率可达到27 MW,只需使用5 ~ 6 km2的面积就可以达到传统风力发电厂占地250 ~ 300 km2的发电能力[12-13]。根据KiteGen公司的估计,MARS系统的发电成本约为0.02 ~ 0.05美元/(kW∙h)。目前,KiteGen公司对高空风电技术难点的解决方案受到了多个国家40余项的专利保护。KiteGen公司建设了世界上首个规模化的风筝发电站,该电站于2015年4月投入使用,装机容量3 MW。2019年3月13日,意大利石油和天然气服务公司Saipem和KiteGen公司签署了一项协议,以支持高空风电技术的开发、建设和商业化[14]。
德国SkySails Power公司是滑翔伞式风筝系统领域的技术领先者,也是世界上第一家成功将滑翔伞式风筝发电技术发展成工业应用的公司,SkySails power公司的200 kW AWES是其主要产品,如图2b所示,该系统可以满载达6 500 h,足够支撑100个家庭的日常生活用电。与塔式风电相比,其发电量显著提高,按照不同尺寸,材料使用量减少了70% ~ 90%,生产成本减少了20% ~ 75%,占地面积减少了75%以上,并且该系统可安装在陆地和海面上,增大了使用范围。同时,SkySails Power公司还将该技术用于船舶辅助动力系统(风力辅助发电机),按目前燃料价格计算,发电成本为0.12 ~ 0.16美元/(kW∙h),风力辅助发电机成本降至0.03 ~ 0.06美元/(kW∙h)[15]。此辅助系统不仅降低了燃料消耗成本,还减少了排放,改善了船只的性能;不同于固定动力系统,辅助发电机可以很容易从一艘船转移到另一艘船上,更高效地利用了风力辅助发电机[16]。
KitePower是荷兰代尔夫特理工大学附属的高空风力发电公司,该公司20 kW的高空风电系统在2007年理论上得到了证实[17]。KitePower公司宣称其开发的100 kW AWES峰值功率可达到180 kW,年发电量为450 MW∙h,相比塔式风电,其使用材料减少了90%,平均的能源成本不到塔式风电的25%,发电量增加一倍以上,如图2c所示。并且该系统可以放置在一个6 m长的集装箱中,具有高度的可移动性,易于部署和维护。2018年6月在荷兰法尔肯堡,KitePower公司成功应用了该风筝发电系统。但该项目只是KitePower公司的一个试验性项目,非完全商业性质。

图2 各公司的滑翔伞式系留风筝AWES产品[18-20]:(a)意大利KiteGen公司;(b)德国SkySails power公司;(c)荷兰KitePower公司
1.2 伞状系留风筝
如图3所示,广东高空风能技术公司开发的伞状系留风筝AWES与KiteGen等公司的高空风力发电实现方案有明显差异,其结构使系统能够在更复杂的风力环境下实现稳定功率发电。伞梯组合系统在电站投资成本上并没有节省太多,但发电时间和稳定性都极大超过了塔式风电,其年发电时间达6 500 h,比塔式风电全年满负荷发电时间只有2 300 h有明显的提升。其发电成本低于0.3元/(kW∙h),不仅低于普通风电,甚至低于火力发电。伞梯组合AWES实现了从“能发电”到“稳定功率发电”的突破。该公司于2010年4月研制出了中国首台100 kW高空风电系统样机。目前,首台2.5 MW高空风能发电机组已经在安徽羌湖完成安装,首个400 MW高空风能项目已经进入筹备期[21]。

图3 广东高空风能技术公司伞梯状系留风筝AWES产品图[22]
2 系留飞行器式AWES技术
系留飞行器式高空风电技术分别通过两种方式实现:①机载发电式系留飞行器,将永磁电机固定在飞行器的机翼或桨叶上,控制飞行器迎风飞行,使永磁电机转动发电,并通过系留绳将电能引入储能设备,其原理如图4a所示。②地面发电式系留飞行器,控制固定翼飞行器在高空按特定的“8”字型轨迹运动从而拖动系留绳,并通过系留绳的牵引作用使地面发电机发电,其原理如图4b所示。
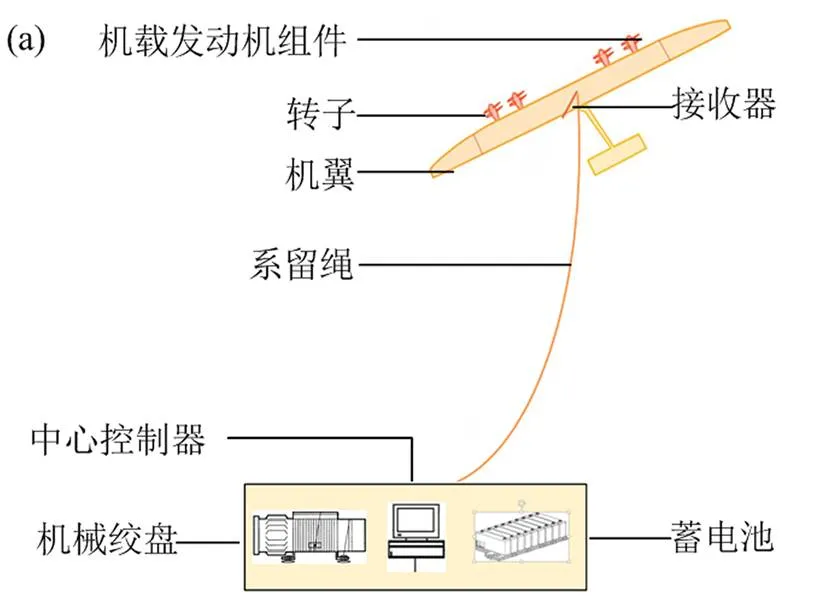

图4 两种系留飞行器式AWES原理图:(a)机载发电式系留飞行器;(b)地面发电式系留飞行器
2.1 机载发电式系留飞行器
美国Makani Power公司设计了型号为M600的飞行器,其翼展长达26 m,机翼搭载永磁发电机,额定功率可达600 kW,如图5a所示。该飞行器可以通过全球定位系统(global positioning system, GPS)和其他传感器来控制其飞行状态和飞行轨迹,并且该公司还设计了多种飞行模式以适应不同环境,保证了发电量的最大化[23]。据该公司估计,这样一套系统可以为大约300户家庭供电。2019年,该公司成功展示了海上机载风力发电系统,该系统用轻质材料取代了数吨钢材,能长时间漂浮在海上持续不断地发电。Makani Power公司在挪威卡莫伊的一个海上浮动平台上成功演示了侧风飞行,证明了该模型符合现实,如图5b所示[24-25]。
美国Sky WindPower公司开发了飞行风力发电机(flying electric generators, FEG)系统,如图6[26-28],FEG系统额定功率为240 kW,转子直径约10 m,其占地面积约为额定功率相同的塔式风力发电机占地面积的四分之一。FEG系统可以根据风和天气条件对飞行器进行编程以实现自动起飞和降落,其设计工作高度为5 km,可以携带有效载荷(例如监视、通信设备),并且仍然可以向地面发送大量电能,该系统每年的发电量将达到数兆瓦时。2011年12月,Sky WindPower公司的Jabiru II原型机测试取得成功。

图5 Makani Power M600机载发电式AWES[24-25]:(a)M600飞行器;(b)海上浮动平台飞行演示

图6 Sky WindPower公司机载发电式AWES产品[26-28]
2.2 地面发电式系留飞行器
荷兰Ampyx Power公司在制造自动飞机方面拥有很多经验,该公司将飞行器用于高空风电系统,由先进的复合材料制成的AP3飞行器如图7所示,其翼展达12 m,常规飞行高度为200 ~ 450 m,极限高度可达750 m,最大荷载可达4.2 t[29-30]。该飞行器可实现全天候自动进行发射、发电、着陆操作,无需人工干预。同时,该公司研发了AP4和AP5飞行器,AP4是Ampyx Power公司的第一个商业化产品,150 m2的机翼能和各种发电机组合使用;AP5采用200 ~ 250 m2的机翼,结合5 MW的发电机组,发电量大幅提升,并且开拓了海上浮动风能市场。2017年,该公司与德国公用事业公司RWE签署了合作协议,两家公司将建立海上测试站[31]。

图7 Ampyx Power公司地面发电式AWES产品[32]
3 系留飞行器式AWES技术
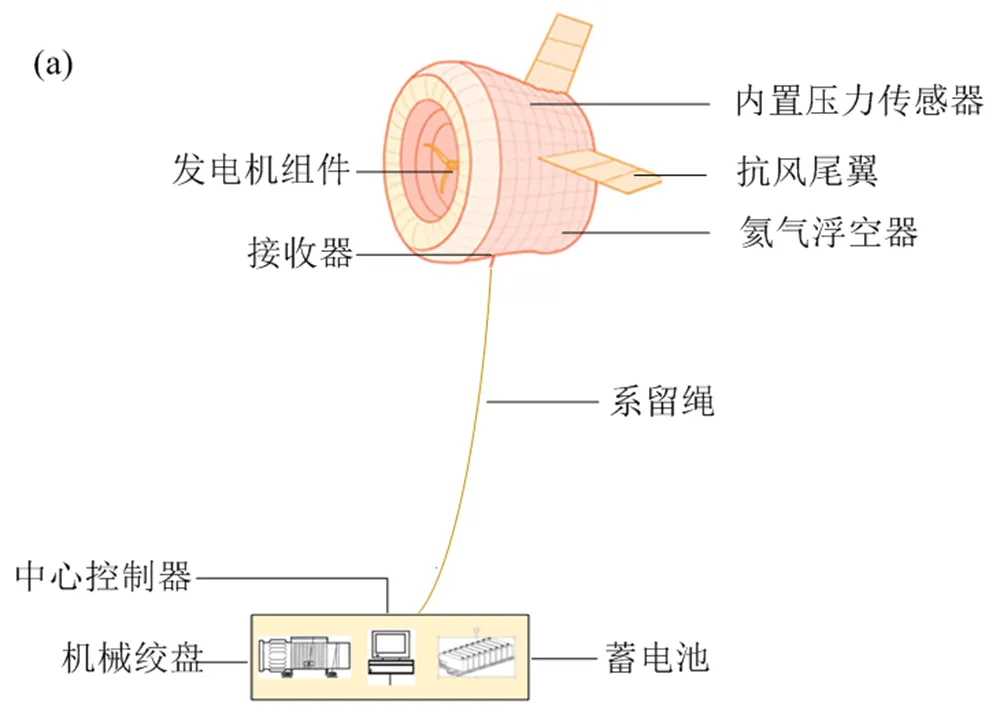
目前,系留浮空器式AWES技术可以通过两种方式实现:一是将风扇发电机组固定在一个镂空形浮空器中,漂浮在一定高度,利用高空风能发电,其原理如图8a所示。二是将涡轮形浮空器上升到一定高度,利用高空风吹动浮空器旋转,从而带动浮空器两端的发电机发电,原理如图8b所示。
美国麻省理工学院成立的初创公司Altaeros Energies设计了第一个浮动风力涡轮机(buoyant airborne turbine, BAT)系统[33],如图9。BAT系统利用成熟的航空航天技术,将风力涡轮机提升到高空进行发电,可根据实际情况自由设定漂浮高度,并且输出电能不受任何天气障碍的影响[34]。据Altaeros Energies公司介绍,该装置最高可在离地约600 m的高空持续发电18个月,产生的能量是相同大小的塔式风力发电机的两倍多,其安装简单快捷,不需要大型地下基础设施来安装,同时消除了传统风力涡轮机面临的许多后勤挑战。2014年12月,日本软银公司向Altaeros Energies公司投资700万美元,以支持BAT系统的持续开发和商业化[35]。

图9 Altaeros Energies公司系留浮空器式AWES产品[36]
2008年,加拿大Magenn Power公司开发了名为空气转子系统(Magenn air rotor system, MARS)的AWES系统[37],如图10所示。MARS利用氦气为空气转子提供升力,等上升到一定高度时,获得高空强劲风,使其内置涡轮机旋转发电。此外,旋转还将引起马格努斯效应,该效应不仅可以为系统提供额外的升力,而且还可以使设备保持稳定,不随风漂动。Magenn Power公司称其系统目标运用高度在200 ~ 300 m,运行效率可达40% ~ 50%,远远超过塔式风电发电效率。MARS也有较强的移动性,有望成为一个非常灵活的系统,可以快速安装到灾区或其他偏远的需电地区。目前,该系统进展缓慢,仍处于概念验证阶段。

图10 Magenn Power公司系留浮空器式AWES 产品[37]
总体而言,系留浮空器式AWES是目前高空风电较好的解决方式,具有结构简单、容易控制、能够实现长时间高效率发电等优点,但由于受制于浮空器本身抗风性能及体积的限制,使得发电量难以提高。
4 关键技术分析
4.1 飞行控制
飞行控制是高空风电技术实用化面临的主要问题,AWES的做功结构在实际飞行或漂浮中,无法避免各种扰动,如突风、紊流等。这些扰动会极大地干扰做功过程,导致飞行轨迹偏离、飞行状态紊乱,甚至有可能发生做功结构坠毁[38]。因此,需要人为控制来调整其状态,使系统保持稳定。传统的增稳、控制技术主要是通过控制整体质量来增加物体的稳定性,但对于AWES而言,如果采取增重的方式保证其稳定性,将会消耗许多功用于克服做功结构的重量。目前各公司也在寻求方法来平衡两者矛盾。基于目前飞行控制面临的问题,为推进AWES发展,应该加强以下四个方面的研究[39]:
(1)加强新技术飞行器的特征研究。对于新兴飞行器的控制机理、复杂的耦合特性、气弹效应等对飞行控制的影响,进行深入研究。
(2)重视新的飞行控制方法研究。针对新技术飞行器面临的控制问题,创新控制的基础支撑理论和方法,重视智能控制在解决复杂问题上的优势,实现理论和工程应用的有机结合。
(3)加强控制方式的创新研究。针对飞行器特点,创新飞行器控制方式,另辟蹊径,有效解决目前飞行控制过程中碰到的难题,实现飞行器高效控制。
(4)加强高可靠容错飞行控制系统的研究。研究低误报率、高实时性的故障检测与诊断方法,研究作动器的动态分配与协调方法,发展实时、大范围、多学科优化算法,实现任务在线规划、指挥决策。
4.2 发电稳定性
发电稳定性是风电技术难以克服的问题,塔式风电主要是由于风能不稳定导致,但高空风电相比塔式风电存在更多的不确定因素:高度不断变化会造成飞行轨迹偏离,系留绳受风能干扰会导致传递动作的改变,做功结构在做功的同时,还要保持自身平衡,做功运动与相平衡运动相互耦合、相互影响[40]。这些因素使系统的持续性和稳定性受到极大的影响,同时发电稳定性也得不到保障。因此想要做到稳定发电需要满足以下两个基本前提:
(1)维持系统稳定运行,抗干扰能力强,同时适应各种天气及环境。
(2)系统整体性强,各个部件配合完好,做到相互平衡,相互耦合。
4.3 低雷诺数下的空气动力学特性
AWES的做功结构与常规飞行器的空气动力特性有很大的不同,其尺寸相对较小,飞行速度较低,导致雷诺数很小。低雷诺数下,空气的黏性效应显著,气动力出现一些与高雷诺数下明显不同的特性。主要表现为阻力增大,升阻比减小,气动力和力矩可能出现“滞回”现象[41]。做功结构的附面层对迎角变化非常敏感,飞行器姿态的微小变化很可能会导致附面层分离而使升力大受损失。低雷诺数下的剧烈升阻比下降和升力曲线非线性变化,将会对气动性能和控制带来非常不利的影响[42]。
总的来看,微型飞行器所面临的低雷诺数(102~ 105)空气动力学问题与传统飞机面临的高雷诺数(>106)空气动力学存在很大的不同。在低雷诺数范围中,黏性效应和非定常效应表现明显。由此,科学家由飞行生物激发灵感,采用拍动翼、柔性翼以及可变形翼等飞行方式和结构特性来克服低雷诺数所带来的不利影响,试图改善微型飞行器的气动和飞行性能。但是受投入的资金和人力限制,不管是在理论分析、风洞试验技术、CFD技术以及工程算法等方面尚未有成熟的工具,距离解决飞行器低雷诺数空气动力学问题还有很长的路[43]。
4.4 轻质高强度的蒙皮材料
在AWES中,做功结构或承载结构的寿命直接决定了整个系统的寿命,其结构应保证质量轻。制造材料一般为蒙皮材料,但蒙皮材料一直是限制高空风电技术发展的瓶颈技术之一[44]。优质蒙皮材料的加工工艺十分繁琐,各道工序都会对蒙皮材料的强度、密封性等产生影响。一旦达不到AWES的使用要求,系统使用寿命将大大缩短,发电效率将极大降低,甚至不能进行工作。因此,对轻质高强度蒙皮材料有如下要求:
(1)强度高。由于材料强度取决于浮空器的体积,蒙皮材料的强度应为5 000 ~ 6 500 N/5cm(按200 m级,数十万立方米容积的飞行器,内外压差为3%,安全系数约为1.3 ~ 1.7)。
(2)质量轻,密度为200 ~ 300 g/m2。过高的材料面密度会使浮空器的净浮力极大丧失,难以升到预定高度。
(3)耐环境性能(耐候性)好。环境因素包括高低温、湿度、超强紫外线辐射、耐臭氧等。
(4)阻氦气渗漏性能强。不论浮空器采用氢气或氦气为浮升气体,都需长期工作,阻氦气渗漏性能十分重要,由于氢气分子比氦气分子更小,以氢气为浮升气体时对材料阻渗漏性能要求更高,蒙皮材料阻氦气渗漏性能应为0.22 ~ 1.14 L/(atm∙m2∙d)。
(5)其他性能。如抗皱折性能、为保持飞艇外形所需的抗蠕变性能、缝合工艺性及易于修补性能都应当优良[45]。
4.5 低阻轻质系留绳
在AWES中,系留绳是一种复合线缆,起着重要作用,除了控制飞行高度和飞行状态外,还有传输电能、转递信号等作用。首先,需要关注的是缆绳的阻力问题。缆绳在空中随飞行器一起运动会产生空气阻力,运动速度越快,参与运动的绳长越长,阻力带来的能量消耗也越多。降低缆绳的阻力可有效提升飞行器的飞行速度和高度。其次,要关注的是缆绳的重量问题。飞行器飞行高度越高,则缆绳越长,重量也越大,因而缆绳重量是限制飞行高度的主要因素之一[46]。对于AWES,缆绳还要承担将机上产生的电能传输到地面的任务,增加缆绳导电功能会进一步增大单位长度缆绳的重量。并且绳子在恶劣环境中长时间受到高强度荷载,会加剧老化速度,缩短其使用寿命[47]。一旦系留绳出现断裂,做功系统将受到极大的破坏,整个系统将会暂停工作。因此,高强度系留绳是保证AWES正常工作的重要条件之一[48]。作为制约整个系统发电能力的关键因素,低阻轻质缆绳技术这一难题还有待进一步研究与发展。
5 对比分析
在新能源快速发展的今天,风电技术受到越来越多人的关注,塔式风电技术作为风力发电的代表,有着优化能源结构、改善生态环境、促进社会和经济可持续和谐发展等方面的优势[49],但也存在受风影响大、建设成本高、效率较低等缺点。高空风电技术的出现,克服了塔式风电技术这些方面的缺点。将塔式风电技术与国内外高空风电技术进行了简单的对比,如表1所示[50-51]。

表1 风电技术对比一览表
6 总结与展望
开发高空风能是未来能源技术发展的需要,AWES发电成本大多可控制在低于0.3元/(kW∙h),发电成本较低,电力输出相对稳定,风电场的建设成本较低,占地面积较小,不易受地域差异的限制。总体而言,AWES在建设成本、发电效率、发电成本等方面有着较多优势。目前,AWES在我国的研究才处于起步阶段,还存在较多技术上的困难,尤其是在诸如飞行控制、气动特性、表面材料、发电稳定性等方面存在较多技术难点。高空风能作为一种潜力巨大的绿色新能源形式,如何对其进行合理利用与开发,是我国新能源工业发展将要面临的重大问题之一。
[1] 多金荣. 我国能源可持续发展探析[J]. 林业经济, 2018, 40(3): 88-92, 106. DOI: 10.13843/j.cnki.lyjj.2018. 03.017.
[2] 国家能源局. 关于2019年度全国可再生能源电力发展监测评价的通报[EB/OL]. (2020-05-06).http://zfxxgk.nea.gov.cn/2020-05/06/c_139059627.htm.
[3] 牛东晓, 李建锋, 魏林君, 等. 跨区电网中风电消纳影响因素分析及综合评估方法研究[J]. 电网技术, 2016, 40(4): 1087-1093. DOI: 10.13335/j.1000-3673.pst.2016.04.016.
[4] 蒋宏春. 风力发电技术综述[J]. 机械设计与制造, 2010(9): 250-251. DOI: 10.19356/j.cnki.1001-3997.2010. 09.104.
[5] 马赛, 褚福磊. 风速时间序列模拟的模型有效性验证及代表性风场实例分析[J]. 振动与冲击, 2019, 38(15): 73-79. DOI: 10.13465/j.cnki.jvs.2019.15.010.
[6] ARCHER C L, CALDEIRA K. Global assessment of high-altitude wind power[J]. Energies, 2009, 2(2): 307-319. DOI: 10.3390/en20200307.
[7] 王毅荣, 林纾, 李青春, 等. 河西走廊风能变化及储量[J]. 气象科技, 2007, 35(4): 558-562. DOI: 10.19517/j. 1671-6345.2007.04.022.
[8] 廖顺宝, 刘凯, 李泽辉. 中国风能资源空间分布的估算[J]. 地球信息科学, 2008, 10(5): 551-556. DOI: 10.3969/j.issn.1560-8999.2008.05.001.
[9] REN G R, LIU J F, WAN J, et al. Overview of wind power intermittency: impacts, measurements, and mitigation solutions[J]. Applied energy, 2017, 204: 47-65. DOI: 10.1016/j.apenergy.2017.06.098.
[10] WILLIAMS P, LANSDORP B, OCKESL W. Optimal crosswind towing and power generation with tethered kites[J]. Journal of guidance, control, and dynamics, 2008, 31(1): 81-93. DOI: 10.2514/1.30089.
[11] TERINK E J, BREUKELS J, SCHMEHL R, et al. Flight dynamics and stability of a tethered inflatable kiteplane[J]. Journal of aircraft, 2011, 48(2): 503-513. DOI: 10.2514/1.C031108.
[12] CANALE M, FAGIANO L, MILANESE M. KiteGen: a revolution in wind energy generation[J]. Energy, 2009, 34(3): 355-361. DOI: 10.1016/j.energy.2008.10.003.
[13] CANALE M, FAGIANO L, MILANESE M. High altitude wind energy generation using controlled power kites[J]. IEEE transactions on control systems technology,2010, 18(2): 279-293. DOI: 10.1109/TCST.2009.2017933.
[14] San Donato Milanese. Saipem: agreement with Kitegen for technology to generate power from high altitude wind[EB/OL]. [2019-03-13]. https://www.saipem.com/en/media/news/2019-03-13/saipem-agreement-kitegen-technology-generate-power-high-altitude-wind.
[15] ERHARD M, STRAUCH H. Control of towing kites for seagoing vessels[J]. IEEE transactions on control systems technology, 2013, 21(5): 1629-1640. DOI: 10.1109/TCST.2012.2221093.
[16] ERHARD M, STRAUCH H. Flight control of tethered kites in autonomous pumping cycles for airborne wind energy[J]. Control engineering practice, 2015, 40: 13-26. DOI: 10.1016/j.conengprac.2015.03.001.
[17] JEHLE C, SCHMEHL R. Applied tracking control for kite power systems[J]. Journal of guidance, control, and dynamics, 2014, 37(4): 1211-1222. DOI: 10.2514/1.62380.
[18] KiteGen Research. About KiteGen[EB/OL]. (2010-05-08). http://www.kitegen.com.
[19] Skysails-Power. Installation skysails power[EB/OL]. (2020-07-01). https://skysails-power.com.
[20] Kitepower. Kitepower System for the New Defence Technology Program. (2019-06-13).http://www.kitepower.eu/.
[21] 安徽网. 国内首家高空风能发电项目在绩溪开工总投资7.9亿元[EB/OL]. (2018-02-05). http://www.ahwang.cn/anhui/20180205/1735647.shtml.
[22] 溪绩县人民政府. 绩溪中路高空风能发电有限公司项目推进大会召开[EB/OL]. (2019-05-20).http://www.cnjx.gov.cn/News/show/192585.html.
[23] SCHMEHL R, NOOM M, VAN DER VLUGT R. Traction power generation with tethered wings[M]// AHRENS U, DIEHL M, SCHMEHL R. Airborne Wind Energy. Berlin, Heidelberg: Springer, 2013: 23-45. DOI: 10.1007/978-3-642-39965-7_2.
[24] ZHILTSOV S A, KARPUSHIN A A. Application of an innovative wind power generator for electric power supply to remote consumers[J]. Modern science, 2017(3): 32-39.
[25] Nauticus Live. Shell's partners 'Makani' have successfully conducted first offshore airborne flight with their energy kite[EB/OL]. (2019-08-22). http://www.nauticuslive.com.
[26] ROBERTS B W. Quad-rotorcraft to harness high-altitude wind energy[M]//SCHMEHL R. Airborne Wind Energy. Singapore: Springer, 2018: 581-601. DOI: 10.1007/978-981- 10-1947-0_23.
[27] Sky Windpower Official Website. Power generation flight-angle 1[EB/OL]. (2011-12-05). https://www.skywindpower.com/index.htm.
[28] Sky Windpower. Flying electric generators[EB/OL]. (2011-12-03). http://www.skywindpower.com.
[29] SIEBERLING S, RUITERKAMP R. The powerplane an airborne wind energy system-conceptual operations[C]// 11th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference. Virginia Beach: AIAA, 2011. DOI: 10.2514/6.2011-6909.
[30] RUITERKAMP R, SIEBERLING S. Description and preliminary test results of a six degrees of freedom rigid wing pumping system[M]//AHRENS U, DIEHL M, SCHMEHL R. Airborne Wind Energy. Berlin, Heidelberg:Springer, 2013: 443-458. DOI: 10.1007/978-3-642-39965-7_26.
[31] FAGIANO L, ZGRAGGEN A U, MORARI M. On modeling, filtering and automatic control of flexible tethered wings for airborne wind energy[M]//AHRENS U, DIEHL M, SCHMEHL R. Airborne Wind Energy. Berlin, Heidelberg: Springer, 2013: 167-180. DOI: 10.1007/978-3-642-39965-7_9.
[32] Ampyx Power. High winds: extracting wind power from high altitudes[EB/OL]. (2017-12-11). http://www.ampyxpower.com.
[33] VERMILLION C, GLASS B, REIN A. Lighter-than-air wind energy systems[M]//AHRENS U, DIEHL M, SCHMEHL R. Airborne Wind Energy. Berlin, Heidelberg:Springer, 2013: 501-514. DOI: 10.1007/978-3-642-39965-7_30.
[34] DEODHAR N, VERMILLION C, TKACIK P. A case study in experimentally-infused plant and controller optimization for airborne wind energy systems[C]//2015 American Control Conference (ACC). Chicago: IEEE, 2015: 2371-2376. DOI: 10.1109/ACC.2015.7171087.
[35] SAEED M, KIM M H. Aerodynamic performance analysis of an airborne wind turbine system with NREL Phase IV rotor[J]. Energy Conversion and Management, 2017, 134: 278-289. DOI: 10.1016/j.enconman.2016.12.021.
[36] Altaeros Energies. Giant inflatable wind turbine to soar to 300 metres[EB/OL]. (2014-03-21).https://www.wired.co.uk/article/altaeros-wind-turbine.
[37] MAGULÁKOVÁ L, RUSINOVA L, BARTKO L. Wind turbine mars as a nonstandard sources of wind energy [J]. Acta Technica Corviniensis-Bulletin of Engineering, 2011, 4(4): 51.
[38] LAMBERT C, NAHON M, CHALMERS D. Implementation of an aerostat positioning system with cable control[J]. IEEE/ASME Transactions on Mechatronics, 2007, 12(1): 32-40. DOI:10.1109/TMECH.2006.886251.
[39] 马洪忠, 水尊师, 魏东辉. 飞行控制技术面临的挑战与发展[J]. 导航定位与授时, 2014, 1(2): 1-6, 24. DOI: 10.3969/j.issn.2095-8110.2014.02.001.
[40] 和萍, 文福拴, 薛禹胜, 等. 不同类型风电机组对小干扰和暂态稳定性的影响[J]. 电力系统自动化, 2013, 37(17): 23-29, 135. DOI: 10.7500/AEPS201211009.
[41] 袁昌盛, 付金华. 国际上微型飞行器的研究进展与关键问题[J]. 航空兵器, 2005(6): 50-53. DOI: 10.3969/ j.issn.1673-5048.2005.06.013.
[42] OKAMOTO M, AZUMA A. Aerodynamic characteristics at low Reynolds number for wings of various planforms[J]. AIAA journal, 2011, 49(6): 1135-1150. DOI: 10.2514/1.J050071.
[43] 李锋, 白鹏, 石文, 等. 微型飞行器低雷诺数空气动力学[J]. 力学进展, 2007, 37(2): 257-268. DOI: 10.3321/j. issn:1000-0992.2007.02.009.
[44] 赵达, 刘东旭, 孙康文, 等. 平流层飞艇研制现状、技术难点及发展趋势[J]. 航空学报, 2016, 37(1): 45-56. DOI: 10.7527/S1000-6893.2015.0332.
[45] 顾正铭. 平流层飞艇蒙皮材料的研究[J]. 航天返回与遥感, 2007, 28(1): 62-66. DOI: 10.3969/j.issn.1009- 8518.2007.01.013.
[46] 王若钦, 严德, 李柳青, 等. 切风模式风力发电飞行器的进展与挑战[J]. 航空工程进展, 2018, 9(2): 139-146. DOI: 10.16615/j.cnki.1674-8190.2018.02.001.
[47] 王亚伟, 贾月红, 陈智谦, 等. 飞艇系留系统静态与动态仿真研究[J]. 航天返回与遥感, 2012, 33(2): 93-99. DOI: 10.3969/j.issn.1009-8518.2012.02.021.
[48] CHERUBINI A, PAPINI A, VERTECHY R, et al. Airborne wind energy systems: a review of the technologies[J]. Renewable and sustainable energy reviews, 2015, 51: 1461-1476. DOI: 10.1016/j.rser.2015.07.053.
[49] BAÑOS R, MANZANO-AGUGLIARO F, MONTOYA F G, et al. Optimization methods applied to renewable and sustainable energy: a review[J]. Renewable and sustainable energy reviews, 2011, 15(4): 1753-1766. DOI: 10.1016/j.rser.2010.12.008.
[50] 许国东, 叶杭冶, 解鸿斌. 风电机组技术现状及发展方向[J]. 中国工程科学, 2018, 20(3): 44-50. DOI: 10.15302/J-SSCAE-2018.03.007.
[51] 柴大鹏, 史慧, 薛松, 等. 风电并网附加成本确定性模型和随机性模型的模拟仿真[J]. 电网技术, 2014, 38(3): 687-693. DOI: 10.13335/j.1000-3673.pst.2014.03.022.
Review on Development Status and Key Technology of Airborne Wind Energy System
SHAO Lei, MAO Hong-lin, XING Sheng, LI Wei, FANG Zi-qi, HOU Yang
(School of Aeronautics, Chongqing Jiaotong University, Chongqing 400074)
Airborne wind energy system (AWES) refers to extract power from high altitude winds and convert into electricity by using the tethered aircraft systems. It has
considerable attention in recent years due to its low cost, high efficiency and no pollution. In this paper, the basic principle, development and application of several AWES technologies were introduced, and their performances were analyzed and compared. This work may provide some reference for the future development of AWES technologies.
airborne wind energy; high altitude energy; tethered aircraft
2095-560X(2020)06-0477-09
TK81
A
10.3969/j.issn.2095-560X.2020.06.005
邵 垒(1989-),男,博士,讲师,主要从事飞行器结构设计研究。
2020-07-28
2020-09-15
重庆市教委科学技术研究项目(KJQN201900738);飞行器环境控制与生命保障工业和信息化部重点实验室开放课题(KLAECLS-E-202002)
邵 垒,E-mail:shaolei@cqjtu.edu.cn
