手机中卫星导航数据的精度及随机特性
2021-01-05曾树林匡翠林李燕杰
曾树林,匡翠林,李燕杰
(中南大学 地球科学与信息物理学院,长沙 410083)
0 引言
智能手机作为1 种使用最普遍的全球卫星导航系统(global navigation satellite system, GNSS)设备,其最大的不足是定位精度低。在2016 年以前,用户仅能从手机中获取位置、速度和时间,以及卫星高度角、方位角等信息[1],难以利用手机中的GNSS 原始观测数据开展研究,这在一定程度上限制了手机端GNSS 定位精度的提升。2016 年5 月,谷歌公司宣布从安卓(Android)7.0 起,对外开放GNSS 的原始观测数据,用户可直接获得手机伪距、载波、多普勒和载噪比等原始观测信息[2]。目前已有一些有关手机中GNSS 数据质量分析和定位效果评估的研究,但对数据质量的分析大多都停留在信号载噪比、观测数据残差和占空比(duty cycle)对周跳的影响等方面[3-4],对观测数据随机误差特性仍缺乏深入分析。精确分析观测数据随机误差特性,将有利于在高精度定位时建立更合适的随机模型。
分析GNSS 导航数据随机误差特性的方法有极大似然估计[5]、方差分量估计[6]和阿伦(Allan)方差[7]等。Allan 方差因计算简单,能够识别多种随机噪声并提取噪声特性参数,已广泛地应用到钟稳定度和惯导随机误差特性的分析中,目前也逐渐应用到GNSS 定位误差或观测值误差的分析中。文献[7]利用Allan 方差分析了多种定位模式下GNSS 的定位误差,证明了Allan 方差用于分析GNSS 随机误差的可用性和有效性。文献[8-9]利用Allan 方差,分别对测量型接收机中全球定位系统(global positioning system, GPS)和北斗卫星导航系统(BeiDou navigation satellite system, BDS)观测值验后残差随机特性进行了分析。文献[10]利用Allan 方差验证了GNSS 导航数据未模型化误差的随机特性。为深入分析手机中GNSS 导航数据的误差特性,本文运用超短基线差分法,计算出手机中双频GNSS 观测数据的单差残差,以单差残差作为观测数据的误差,分析其精度,并运用Allan 方差分析残差随机特性。
1 观测数据残差提取和分析方法
本文首先计算出观测数据单差残差,再利用Allan 方差分析单差残差随机特性。
1.1 双差残差恢复单差残差原理
双差法是先将2 个测站的GNSS 观测值通过差分计算,得到站间单差差分值,再将站间单差差分值,在不同卫星间进行差分计算。在零基线或超短基线下,双差法消除了卫星星历误差、大气延迟和接收机钟差等误差,仅剩余接收机内部相关误差。在双差法的计算过程中,会引入参考星误差影响,不便于分析单颗卫星误差特性[11],故一般采用站间单差法计算残差。在利用站间单差法计算残差时,得到的站间差分值中,还含有接收机相对钟差和相对模糊度这2 个未知参数,需要采用最小二乘方法估计。而采用双差残差恢复单差残差[12]的方法,可直接将双差残差转换为站间单差残差,无需进行参数估计,计算更简单。
若已知1 个历元站间的单差(single-difference,SD)残差序列为(i=1, 2,…, n,n 为当前历元共视卫星数),则以1 号卫星为参考星时,由单差残差计算双差(double-difference,DD)残差的公式为

已知双差残差时,由式(1)即可反算出单差残差,公式推导过程可参见文献[12]。
1.2 Allan 方差计算及分析方法
Allan 方差[13]开始主要用于振荡器频率稳定度的评估,现多用于惯导器件的随机误差建模,目前也用于GNSS 数据随机误差分析。
1.2.1 Allan 方差计算过程
Allan 方差的基本思想是对完整数据序列以一定采样率进行采样,计算该采样率下的Allan 方差值,再改变采样率依次计算各采样率下的Allan 方差值,以不同采样率表征序列随机特性。Allan 方差的采样方式有重叠采样和非重叠采样2 种,其中重叠采样的计算流程为:
1)设数据序列总时长为T,时间间隔为0τ ,包含数据点个数为N。以m 个数据为采样间隔,将数据序列按重叠采样方式划分为M = N -m +1个数据子集,对应采样时间为 τ= m·τ0。
4)计算全部数据子集平方值的平均值,即可得出对应采样率下的Allan 方差计算值2σ 。Allan方差的计算公式为

5)改变采样间隔,重复步骤1)~步骤4),计算不同采样间隔下的Allan 方差值。
1.2.2 Allan 方差随机误差识别方法
随机误差的类型通过Allan 方差平方根值的双对数(log-log)图曲线斜率进行识别。常见的随机误差有白噪声(white noise,WN)、闪烁噪声(ficker noise,FN)、随机游走(random walk,RW)和1 阶高斯马尔科夫过程(Gauss-Markov,GM)等。根据随机误差的理论功率谱密度(power spectral density,PSD),Allan 方差理论值的计算式[14]为

式中 SΩ( f )为随机误差的PSD。根据理论Allan 方差即可得出log-log 图理论斜率,并提取噪声特性参数,如表1 所示。
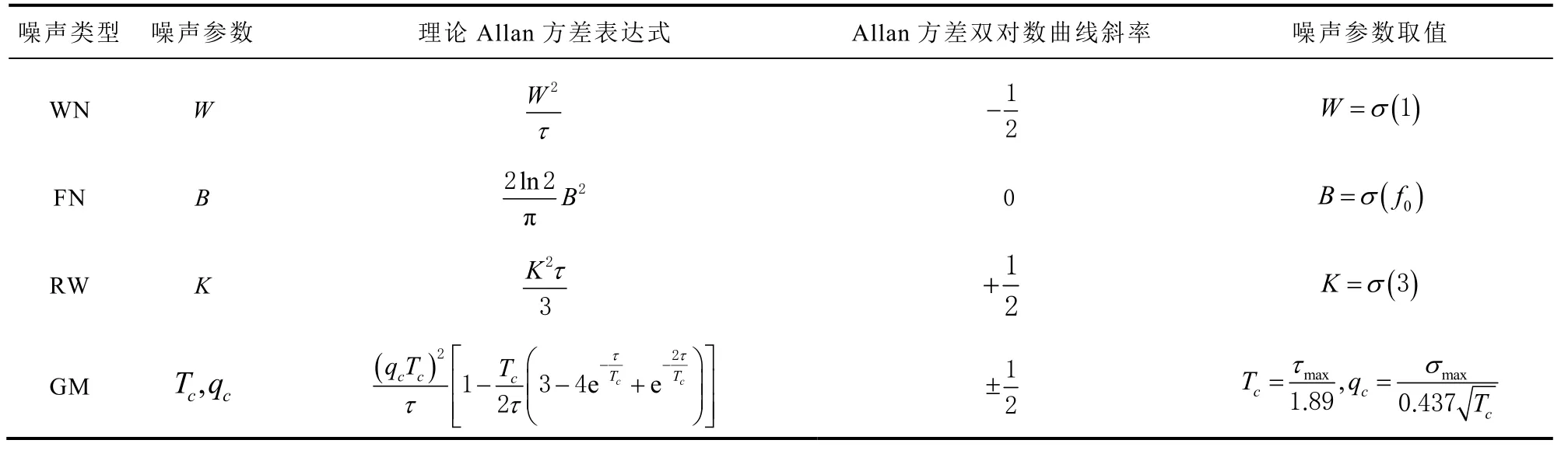
表1 4 种典型随机误差特性表
2 数据采集及残差计算
2.1 实验数据采集
实验采用2 台型号相同的双频手机小米8,实验场地为中南大学某办公楼天台,实验场地视野开阔。由于手机中内置GNSS 天线的准确位置未知,假定天线位于手机正面上边缘中心。将2 台小米8 手机并排紧贴放置,基线长约为7 cm,可视天线位于同一位置,实验布置如图1 所示。GNSS数据记录软件为Geo++ RINEX Logger(v2.1.3)[15],该软件可直接将手机中GNSS 数据记录为与接收机无关的交换格式(receiver independent exchange format,RINEX),数据采样率为1 Hz,采集时长6 h。实验前,采用2 台天宝R9 接收机,以相对定位技术测得手机观测位置参考坐标,用于后续固定坐标计算观测数据残差;因手机准确天线相位中心未知,不能将测量型天线与手机天线相位中心位置精确对中,故不考虑测量型天线对中和天线高误差。

图1 手机GNSS 数据采集实验
2.2 观测数据单差残差计算
手机导航观测数据的单差残差值通过双差恢复单差法计算得出。首先采用尔特克利布(RTKLIB)软件固定(Fixed)解算模式计算双差残差,在Fixed 模式中,将基准站和流动站坐标均固定为已知值,只对其他测量误差参数进行估计,输出结果为观测值残差,可专门用于残差分析。其中固定坐标由测量型接收机采用相对定位方式测量得到。卫星截止高度角设为5°。计算出双差残差后,根据双差恢复单差原理,从GPS、BDS、伽利略卫星导航系统(Galileo navigation satellite system,Galileo)和格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)这4 个系统中选取每个系统高度角最大的卫星作为参考星,然后将双差残差转换为单差残差。
2.2.1 L1 频率伪距和相位残差
手机中L1 频率(为表述方便,Galileo E1、BDS B1 频率均称为L1 频率)导航观测数据的伪距和相位单差残差结果如图2 所示。从图2 可以看出,不同系统导航数据的的伪距和相位残差基本分布在零参考线附近,均无明显的系统偏差或线性趋势项。从伪距残差的数值上看,GPS 数据的残差大小在10 m 左右,Galileo 和BDS 在5 m 左右,GLONASS 中约5%的残差超过了15 m。对于相位残差,GPS 中97%的残差集中在20 mm 以内,但部分残差的数值波动较大,其波动幅值达到了50 mm,Galileo 的相位残差在10 毫米级,GLONASS 和BDS 在15 mm 左右,但BDS 中存在较多粗差。
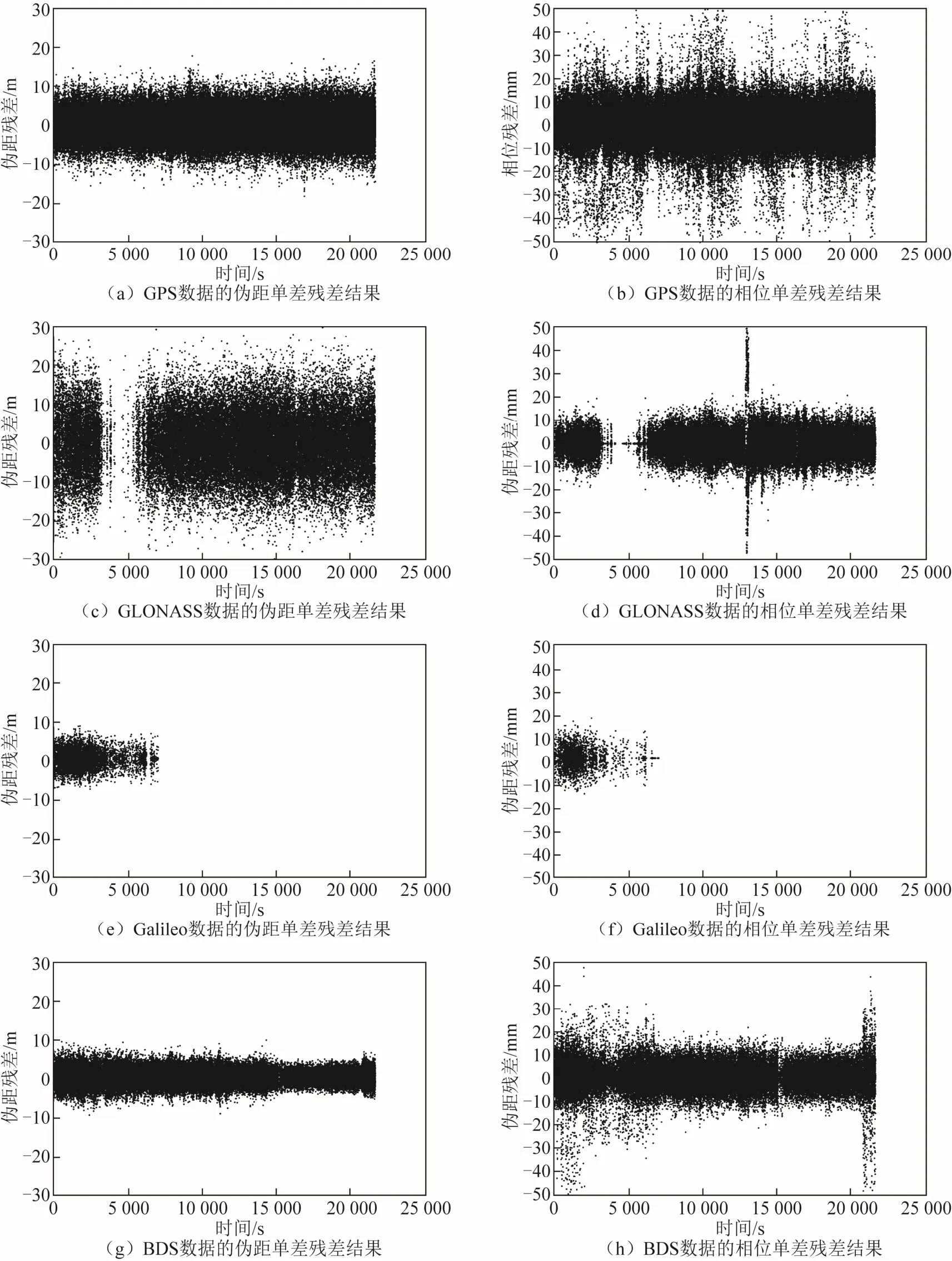
图2 手机中L1 频率导航数据的伪距和相位单差残差结果
2.2.2 L5 频率伪距和相位残差
小米8 手机目前仅支持接收GPS 和Galileo卫星的双频信号,第2 个频率为L5/E5a 波段,为表述方便,以下均称为L5 频率。但手机中双频数据可用率还较低,本实验中仅接收到6 颗GPS和3 颗Galileo 卫星的L5 频率信号,其原因是目前能够播发L5 频率信号的卫星还较少,如GPS中仅Block IIF 卫星播发L5 频率信号。图3 为L5 频率导航观测数据的伪距和相位单差残差,同样地,L5 频率观测数据的残差序列也无明显的系统偏差和线性趋势项。GPS 数据的伪距残差大小在5 m 以内,相位残差在20 mm 左右。实验中接收到Galileo 卫星L5 频率信号的时间比L1频率更短,可用L5 频率观测数据很少。在数值上,L5 频率伪距残差在3 m 以内,相位残差在10 mm 左右。

图3 手机中L5 频率导航数据的伪距和相位单差残差结果
2 台手机型号和观测环境完全相同,可认为观测精度相同,根据误差传播定律,将单差残差除以即可得到单台手机观测精度[16]。表2 为手机中所有卫星不同频率观测数据的标准方差平均值。对于伪距观测数据,L5 频率数据的精度均高于L1频率,L1 频率数据中除GLONASS 外,其他系统数据的精度在2 m 左右,L5 频率数据的精度优于1 m。而相位观测数据中双频数据的精度无明显差别,数值均在3~6 mm 范围内。但Galileo L5 频率相位数据的结果比L1 频率略差,这可能是由于Galileo 观测数据过少,导致统计精度出现了偏差。

表2 所有卫星不同频率伪距及相位精度统计结果
此外,由于接收到L1 频率数据的卫星数比接收到L5 频率数据的卫星数多,且部分卫星中L1频率数据比L5 频率数据的观测时段更长,这可能会对2 个频率数据的精度统计产生影响。对此,需选取同时包含L1 和L5 2 个频率的卫星导航数据,在相同卫星数和相同时段长度的条件下进行精度统计。因Galileo 卫星观测时段过短,不利于统计分析,则仅对GPS 的2 个频率数据在相同条件下进行统计,结果如表3 所示。

表3 相同条件下GPS 双频伪距及相位精度统计结果
对比表3 与表2,对于相同频率数据的统计结果,2 个表中伪距精度结果仅有厘米级差别,相位精度仅亚毫米级差别。在表3 中,GPS L5 频率数据的伪距精度仍为L1 频率的3 倍左右,L5 频率的相位精度比L1 频率约高1 mm,该结果与表2结果基本一致。
综上所述,手机中Galileo 导航数据的伪距和相位精度均较高,但不足的是本次实验中可用的Galileo 数据过少,GPS 和BDS 数据的精度次之,GLONASS 精度最低。L5 频率数据中伪距和相位精度整体上均高于L1 频率数据。
不断强化政策制度保障。结合修订制定国防动员、民兵工作相关法律法规,从国家层面进一步明确经济功能区和企业在国防建设方面的法律责任,强化顶层设计,提高制度权威。各地区、各行业健全完善地方性、行业性法规制度,对后备力量建设相关内容作出具体规定,强化刚性措施,规范经济功能区武装工作秩序。探索企业税收减免、发展资金扶持等经济利益与履行国防义务挂钩的措施办法,引导企业自觉履行国防义务、主动支持民兵建设。坚持严格执法,适时通报批评落实武装工作不力的党政机关和个人,追究相关领导责任,对拒绝履行国防义务的企业实施严厉的行政和经济处罚,形成震慑效应,督促各级党政机关和企业切实抓好民兵建设。
3 残差随机特性分析
3.1 残差自相关性检验
首先利用简单的自相关性分析检验残差随机特性,采用矩阵实验室(MATLAB)自相关函数计算伪距和相位残差自相关系数。以G32 号卫星为例,图4 为不同频率的伪距和相位残差在200 s 相关时间内的自相关系数图。

图4 G32 不同频率导航数据的伪距和相位残差自相关系数
从图4 可以看出,对于L1 频率,伪距残差和相位残差自相关系数迅速减小到0.2 以内,无明显自相关性,但伪距比相位相关性波动更大。L5 频率导航数据的伪距残差在20 s 内自相关系数均超过了0.4,并在100 s 后才逐渐减小至0.3 以下,存在较强的时间相关性,但相位残差基本无自相关性。这些结果表明,手机中GNSS 导航数据并不只包含白噪声,还含有有色噪声,需要采取新方法进一步对有色噪声类别进行识别。本文以Allan 方差方法分析观测数据残差随机特性。
3.2 残差Allan 方差分析
利用Allan 方差分析观测数据残差随机特性。在图2 和图3 所示的整个观测过程中,单颗卫星残差序列会出现不连续,但文献[17]指出序列的不连续性不会对Allan 方差分析结果造成影响,故可对单颗卫星计算Allan 方差。另外,粗差会引起Allan 方差图像变形,进而影响GM 这类噪声的识别和噪声参数的提取[17],在计算Allan 方差前以3σ 原则剔除粗差。
以G32 卫星为例,其伪距残差Allan 方差log-log 曲线如图5 所示,根据表1 方法,识别噪声类型并提取特性参数值。对于 L1 频率导航数据的伪距残差,可以看出,在采样时间小于5 s 的初始阶段,曲线斜率与斜率为的WN 参考线一致,残差表现为白噪声。白噪声特性参数是在采样时间τ=1 s 处取得的,对应的WN 参数值为W=2.18 m。在采样时间大于6 s 以后,曲线斜率趋于0,表现出闪烁噪声FN,FN 的噪声参数是在曲线斜率为0 的任意采样时间下取得的,图5 中斜率最早趋近于0 的时刻为τ=6 s,此时对应的FN 噪声参数B=1.30 m。但在采样时间达到100 s 后,噪声类型不再表现为FN。对于L5 频率数据,在采样时间小于10 s 时,Allan 方差曲线几乎与WN 参考线完全重合,表现出较纯净的WN,对应的噪声参数值为W=0.63 m。在采样时间大于10 s 以后,曲线斜率为0,此后一直表现为FN,取斜率最早趋近于0的时刻,即τ=10 s,此时对应的噪声参数B=0.22 m。

图5 G32 不同频率数据的伪距残差Allan 方差曲线
FN 是1 种低频有色噪声,FN 的存在表明残差序列存在时间相关性,而在残差自相关性分析中,G32 卫星L5 频率数据的伪距中表现出的自相关性也表明残差序列中存在时间相关性,这与Allan 方差分析结果一致,证明了Allan 方差结果的正确性。另一方面,在自相关分析中,G32 L1 伪距残差自相关性不明显,但在Allan 方差分析中表明其存在有色噪声,即存在时间相关性,说明Allan方差对于识别相关误差具有更强的敏感性。
运用上述方法分析所有卫星的伪距和相位残差,其Allan 方差曲线如图6 所示。从图6 可以看出,对于同一类观测数据,各颗卫星观测数据残差的Allan 方差曲线走势基本一致,说明手机中不同卫星同类观测数据误差特性相似,但在数值大小上有所差别,主要是由于卫星高度角不一致或其他因素引起的观测数据精度不同。在曲线初始阶段,曲线斜率约为,L1 与L5 伪距和相位残差均主要表现为WN。随着采样间隔的增大,2 个频率伪距残差斜率趋近于0,开始出现FN,尤其是L5 频率数据的伪距残差中表现出了更明显的FN。而对于相位残差,L1 频率的结果中部分卫星的残差表现出较弱的FN,L5 频率的结果中所有卫星的残差均一直表现为较纯净的WN,未表现出明显的有色噪声。

图6 不同频率数据的伪距和相位残差Allan 方差曲线(图中虚线为WN 参考线)
不同频率伪距和相位噪声特性参数统计值如表4 所示。从伪距中WN 的噪声参数值来看,Galileo L1 频率数据中的WN 值最小,GPS 和BDS次之,GLONASS 最大,这与伪距残差标准方差分析结果一致。同样,L5 频率数据的WN 值也是Galileo 最小。另外,除GLONASS 外,其余各系统的伪距残差还表现出FN,其噪声参数在数值上有分米级差别。而双频相位观测数据中的噪声类型均主要为WN,数值上仍是Galileo 最小,但不同系统之间的数值仅相差1~2 mm。

表4 不同频率伪距和相位噪声特性参数统计表
以上分析结果中,手机中伪距和相位2 类观测数据包含的噪声类型不一致,其中伪距包含WN 和FN 2 类噪声,而相位则主要包含WN。伪距中存在明显有色噪声可能源于以下2 个原因:①手机中使用的Geo++ RINEX Logger 数据采集软件已经对伪距进行了平滑处理,即采用相位平滑伪距技术减小了伪距误差,部分测量型接收机中也具有这种功能,如天宝R9;②多路径效应对测量结果的影响,理由是通过超短基线差分不能完全消除观测值数据中的多路径误差,并且手机中采用的线性极化GNSS 天线,导致GNSS 信号中更易产生多路径误差,即使是在弱多路径环境下,伪距数据也受到了较强的多路径影响。除多路径效应外,文献[7]指出,残差中残余的对流层延迟湿分量误差也可引起有色噪声,而本实验中2 台手机的基线长仅几厘米,可认为大气延迟误差完全被消除,故本实验中伪距所包含的有色噪声不是来源于大气残余误差。对手机中GNSS 导航数据包含的有色噪声的来源有待进一步验证。
4 结束语
本文分析了手机中双频多系统GNSS 原始观测数据的精度,并采用Allan 方差分析了其随机特性,得出如下主要结论:
1)从精度统计结果来看,就不同频率而言,L5 频率观测数据的伪距和相位精度整体上高于L1频率。对于伪距观测数据,L1 频率数据的精度在2 m 左右,L5 频率数据精度优于1 m。而相位观测数据中,双频精度均为3~6 mm。对于手机中不同卫星系统的观测数据,Galileo 的伪距和相位精度均较高,GPS 和BDS 次之,GLONASS 精度最低。
2)Allan 方差分析结果表明,手机中GNSS 观测数据并不只含白噪声。在弱多路径环境下,L1 和L5 频率数据的伪距中均包含WN 及FN。L1 频率相位中主要包含WN,但存在较弱的FN,而L5 频率相位中仅包含较纯净的WN。
手机中内置GNSS 天线为线性极化天线,这类天线对多路径的抵抗能力较差,这可能是观测数据产生有色噪声的主要原因,对于手机中GNSS 信号的多路径效应有待于深入研究。另外,传统的卡尔曼滤波要求过程噪声和观测噪声均为白噪声,而本文结果表明,手机接收的GNSS 数据中存在有色噪声,因此仅考虑白噪声的手机端GNSS 定位算法是不够严密的。在建立适用于手机的GNSS 坐标参数估计随机模型时,需要考虑有色噪声。
