极区间接格网框架惯性基组合导航算法
2021-01-05宋丽君赵万良杨鹏翔杨光乔
宋丽君,周 蕾,赵万良,杨鹏翔,杨光乔
(1.西安建筑科技大学 信息与控制工程学院,西安 710055;2.上海航天控制技术研究所,上海 201109;3.西安现代控制技术研究所,西安 710065)
0 引言
对极区的探索认知、开发保护和利用,是科技大国迈向科技强国的标志,是掌握全球科学发展话语权的必然。
从20 世纪90 年代起,中国就已经开始实质性地参与到北极事务的处理中。为推进科技与经济的发展,我国已经广泛地参与到各类北极活动中,如今我国已成为北极科学活动的大国。虽然与俄罗斯、美国、加拿大、丹麦、挪威等近北极区国家相比,我国在北极航线与北极地区方面的地缘优势并不显著,但是我国北部疆域接近极区,边界政治、地理环境复杂,常有局部骚扰,巡航与空天防卫亟待增强。而且随着我国不断向科技强国之路迈进,军事实力不断增强,以及我国最北端高纬度边疆的国防需求增大,越来越迫切需要增加我国在极区资源开发中的话语权,北极航线的开通,势必会对我国东北地区的经济振兴和军事安全产生极大的影响[1]。
2018 年1 月26 日,国务院新闻办公室发表我国第1 部北极政策白皮书《中国的北极政策》。白皮书指出:中国是陆上最接近北极圈的国家之一,地缘上是“近北极国家”,并从北极的形势与变化、中国与北极的关系、中国北极政策目标和基本原则、中国参与北极事务的主要政策主张等4 个方面进行了阐述。
文献[2]指出,由于北极2 个大国俄罗斯与加拿大,已明确提出2 国在法律上对北极航道的内水主权的确属权,而其他国家只具有无害通过权,导致北极航道法律权属问题一直存在争议,未得到解决;文献[3]提议,我国政府应充分利用北极理事会正式观察员国的身份,主动积极加入到北极地区国际立法工作中,推进与环北极国家的法律协调工作,以保障我国北极航道的顺利通行;文献[4]针对北极航道全年开通后,会对世界地缘战略格局带来影响,以及我国所面临的机遇与挑战,中肯地提出了应对措施;此外,文献[5]通过对国外地缘政治理论的详细评述,预设了多种北极航线地缘政治理论,构建适用于我国国情的地缘政治理论体系,并尽可能维护我国在北极战略中的权益,且在文中筹划出多种地缘政治策略,以便我国在处理北极航线争端时参考或实施。
本文通过广泛调研,认真听取国内各惯性导航系统研制单位和机载惯导系统权威研制单位的应用需求和建议,总结得出极区导航是我国从航空大国向航空强国迈进的1 个基础性技术瓶颈,更是打通极区空中走廊安全通道的关键技术基础。
1 极区导航现存问题
极区及其周边和我国北部边疆近极区领域存在“两高两低三复杂”的特殊情况,使得现有的多种导航设备,在极区考察活动中的可靠性和安全性难以保障,惯性导航系统精度常随纬度和高程的变化而变化,变化范围为6%~10%,尤其是在极区使用非极区导航方法时,已不能满足极区导航的性能要求。非极区导航系统在执行极区导航任务时,主要存在以下2 个问题:
1)常规非极区导航参数表达方式,在极区导航中失去意义。尤其在北极点,所有的方向都是南向,这为极区领航带来方位上的困扰。
2)现有的非极区导航设备无法满足极区全天候导航要求。在北极地区,由于受地球磁场分布及极区特殊的天文和气象条件的影响,飞行过程中的通信和导航性能与中低纬度常规情况有很大的差别,使得非极区导航设备,在极区无法正常工作。
面对错综复杂的极区航行环境,寻求安全有效的极区导航方式,是极区活动迫切需要解决的问题。虽然极区导航的首选导航设备为惯性导航系统,但惯性导航系统本身具有一定的局限性,即误差会随时间积累;所以仅仅依靠惯性导航系统很难完成载机高精度、长航时的飞行任务。因此,载机在飞越极区时,亟待引入外部参考信息与惯性导航系统进行组合导航,通过多传感器信息的采集进行导航数据的融合修正,以达到提高极区导航精度的目的。
2 极区惯性/卫星导航/天文组合导航算法
2.1 惯性/卫星导航/天文组合导航原理
惯性/卫星导航/天文组合导航系统是以捷联惯性导航系统(strapdown inertial navigation system,SINS)为公共参考系统,全球卫星导航系统(global navigation satellite system, GNSS)和天文导航系统(celestial navigation system, CNS)分别与SINS 两两组合,组合后的信息采用2 个独立子滤波器处理,然后将子滤波器输出的导航信息,在主滤波器中进行导航信息智能融合,以获得SINS/GNSS/CNS 组合导航系统误差最优估计值,并利用该误差最优估计值实时对SINS 进行误差修正,来提高组合导航系统的精度[6-7]。 基于间接格网框架的极区SINS/GNSS/CNS 组合导航系统技术如图1 所示。
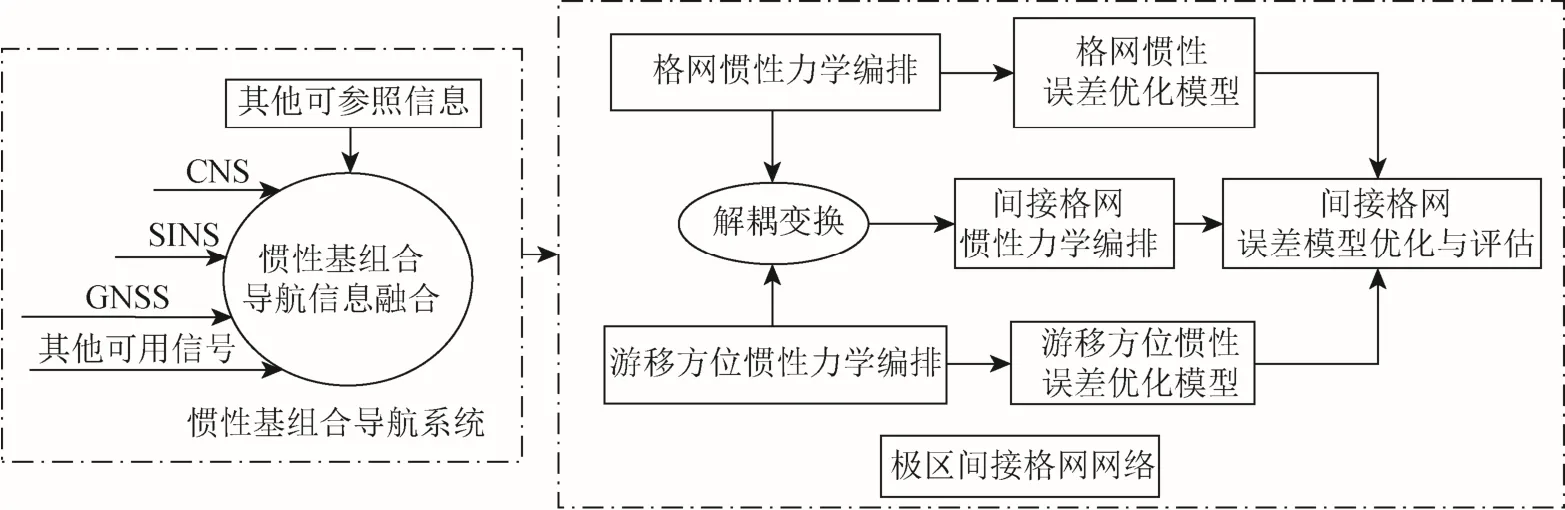
图1 极区惯性基组合导航系统技术示意
2.2 间接格网惯性导航力学编排
格网导航以避免航向参考线在极点处收敛为目的,所有经线在极区航图是平行于格林威治子午线绘制,载机方位也是相对格林威治子午线及其平行线来定义。但是格网导航力学编排在赤道附近无法正常工作,当载机执行全球飞行任务时,需要在赤道附近采用其他的力学编排方案,这样不同的导航力学编排切换过程中会存在振荡现象[8-9]。为解决多种力学编排切换过程存在的振荡问题,本文提出游移方位惯性力学编排和格网惯性力学编排相结合的间接格网惯性导航力学编排。
2.2.1 真北与格网北之间的夹角
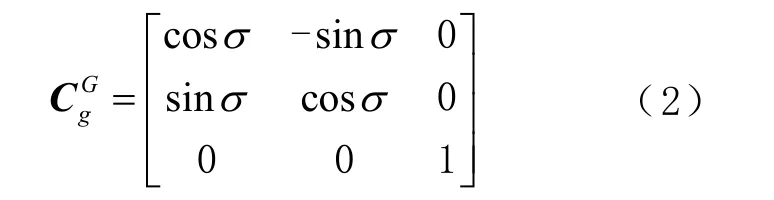
设真北方向与格网北向夹角为σ ,机体所处P点的格网坐标系是水平坐标系,设其地理纬度为L、经度为λ、高度为h[10-11]。绕格网天向旋转,可得格网坐标系(G)与地理坐标系(g)之间的转换矩阵为:
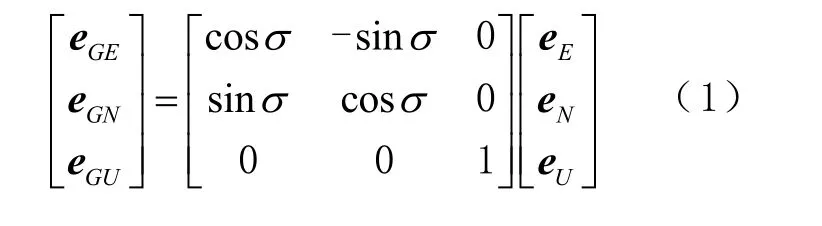
即
式中,( eE, eN, eU)为当地地理坐标系单位向量。
由此可得地心地固坐标系(Earth-centered Earth-fixed, ECEF)与格网坐标系的转换为:
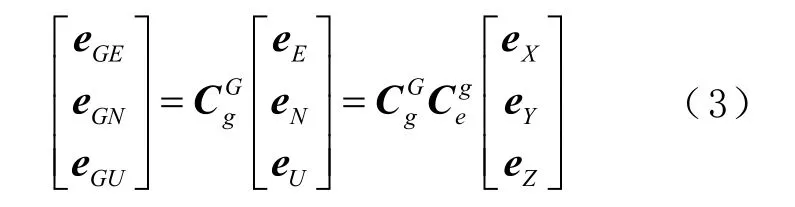

记格网坐标系单位向量为 (eGE, eGN, eGU),地心地固坐标系单位向量为( eX,eY, eZ),由格网北与真北夹角的定义可知,向量 eGN和 eY相互垂直,因此满足内积为零的关系,即



2.2.2 游移方位惯性力学编排与格网惯性力学编排解耦变换
为解决多种力学编排切换过程存在振荡的问题,构建游移方位惯性力学编排和格网惯性力学编排相结合的间接格网惯性导航力学编排。在中低纬度地区,通过游移坐标系和地理坐标系间的关系,将游移方位惯性力学编排的方位和速度投影到地理坐标系;在极区,通过游移坐标系和格网坐标系间的关系,将游移方位惯性力学编排的速度和方位投影到格网坐标系。投影可以采用2 条独立的导航通道:一路导航通道执行游移方位惯性力学编排,在非极区输出相关的导航参数,在极区不输出导航信息;另一路导航通道仅在极区时执行格网惯性力学编排,并在此通道进行游移方位惯性力学编排和格网惯性力学编排的解耦变换,如图2 所示。

图2 游移方位惯性力学编排与格网惯性力学编排解耦变换
1)姿态更新。

导航坐标系为格网坐标系,假设载机姿态速率为ωGb(机体坐标系b 相对导航坐标系G 的角速度),由导航坐标系向机体坐标系保持直角坐标系旋转,可得

整理可得

因机体所处P 点的格网坐标系是水平坐标系,因此由地理导航坐标系内的可得的水平分量式中( eE, eN, eU)为当地地理坐标系单位向量。
RMh、RNh分别为参考椭球子午圈和卯酉圈上的曲率半径。



2)速度更新。由载体在导航系内的比力方程,可类推出格网导航坐标系下的比力方程为

3)位置更新。中低纬度位置求解通过位置方向余弦矩阵微分方程的数值积分获得经纬高定位信息,高纬度地区采用ECEF 坐标表示载机的实时位置为

根据非极区时的游移通道导航信息判断载机是否进入极区,若进入极区则游移导航通道的导航信息不再输出,极区格网导航通道开始工作并输出相关的导航信息;根据极区格网导航通道信息判断载机是否退出极区,若载机退出极区,格网导航通道停止工作,游移导航通道的导航信息继续输出。间接格网惯性导航力学编排可以避免正常导航模式和极区导航模式切换引入的导航误差,实现高纬度地区和中低纬度地区在导航解算算法中内核统一,导航参数计算外在形式统一。
2.3 极区SINS/GNSS/CNS 组合导航系统信息融合
针对极区SINS/GNSS/CNS 组合导航系统的特点,对分散式联邦滤波算法信息分配原则进行分析对比,以SINS 作为主系统进行导航参数输出,CNS 的姿态信息、GNSS 的位置及速度信息作为辅助信息,以校正SINS 的各种参数。
在SINS/GNSS/CNS 组合导航系统中,采用无重置联邦卡尔曼滤波结构。各子滤波器的设计见参考文献[12-13],设SINS/GNSS 组合导航系统的公共状态局部最优估计值为 XGNSS,估计均方差为 PGNSS;SINS/CNS 组合导航系统的公共状态局部最优估计值为XCNS,估计均方差为 PCNS。依据无重置联邦滤波器的全局信息融合算法理论,可得SINS/GNSS/CNS 组合导航系统公共状态(SINS 误差状态)的全局最优估计值 ˆX 及估计均方差P 为

在得到SINS 误差状态的全局最优估计值 ˆX后,需要对SINS 进行实时系统误差校正,并将经过系统误差校正的SINS 的输出作为SINS/GNSS/CNS 组合导航系统的输出。
3 极区SINS/GNSS/CNS 组合导航系统算法仿真实验与结果分析
在间接格网导航框架下建立SINS/CNS/GNSS组合导航的状态空间模型和量测模型,采用实物与仿真相结合的方式[14-15],用以验证基于间接格网框架的极区惯性基组合导航算法的有效性,解决中低纬度地区极区导航算法的系统实验验证问题。极区惯性导航仿真器如图3 所示。

图3 极区惯性导航仿真器
在极区SINS/GNSS/CNS 组合导航系统仿真中,设置为穿越极点飞行8 h,SINS 解算周期为20 ms,GNSS 和CNS 的数据更新周期均为1 s。设捷联惯导系统初始水平对准误差为5′,方位对准误差为10′;初始速度误差为0.1 m/s,初始位置误差为30 m;陀 螺 仪 常 值 漂 移 为 0.01(°)/h, 随 机 游 走 为0.001(°)·h-0.5;加速度计常值误差为5 ×10-5g,其中g 为西安当地重力加速度,大小为 g=9.794 4 m/s2,随机游走为 g × 10-5s-0.5;GNSS 的定位精度为25 m,测速误差为0.1 m/s。电荷耦合器件(charge-coupled device, CCD)星敏感器沿3 个轴方向的测量精度均为10〞,其沿载体x、y、z 3 个轴上的安装误差分别为1′、1′、1.5′。仿真结果如下图4 所示。
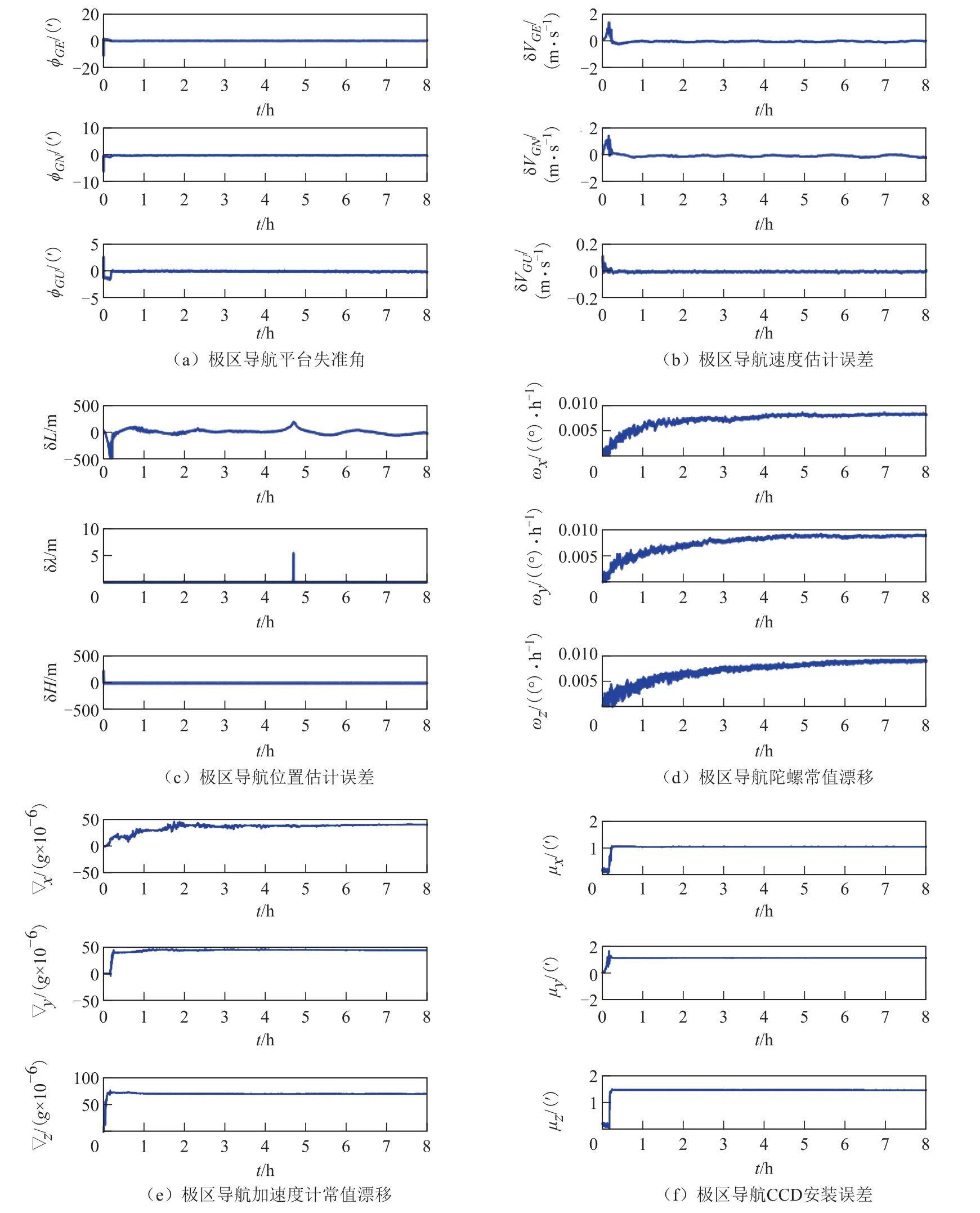
图4 极区导航误差估计
由图4(f)可知,仿真轨迹设置中0~605 s 载机处于静止状态时,星跟踪器的安装误差不可估计,635~750 s 载机做爬升机动后,y 和z 向安装误差角迅速收敛,800~830 s 载机做右转弯机动,x 向安装误差角也迅速收敛。
与此对应,平台失准角图4(a)在载机静止阶段不可估计,该阶段的失准角误差取决于星跟踪器的安装误差角大小,当安装误差角估计收敛后,失准角也收敛,收敛误差小于1′。
静止阶段的速度误差图4(b)和位置误差图4(c)较大,失准角收敛后速度和位置误差也呈舒拉振荡形式。随着极区导航陀螺常值漂移图4(d)和极区导航加速度计零偏图4(e)逐渐被估计处理,组合导航系统的位置和速度误差的幅值将会逐渐减小。
4 结束语
针对极区“两高两低三复杂”的特殊地理环境导致载机飞越极区时定位定向困难,易失灵迷航,单独使用导航系统无法满足载机全球长航时自主飞行导航的精度要求的问题,本文以惯性导航技术为基础,采用多信息融合辅助协同导航,对飞越极区惯性基组合导航系统进行分析推演,形成基于间接格网框架的惯性基组合导航系统,并以相关背景工程型号为平台进行半实物仿真验证评估。从仿真结果整体上看,极区SINS/GNSS/CNS 组合方案同低纬度地区SINS/GNSS/CNS 组合方案的导航精度一致。后续可以对极区机载惯性基组合导航系统模型进行优化提升,并对其导航精度进行评估,为极区载机惯性基组合导航提供工程应用技术支撑,保证载机飞越极区的安全性和可靠性,确保我国在极区探索保护、开发利用的话语权。
