不同分析中心GNSS 实时SSR 产品研究与分析
2021-01-05袁运斌
徐 黎,袁运斌
(1.中国科学院精密测量科学与技术创新研究院,武汉 430077;2.中国科学院大学 地球与行星科学学院,北京 100049)
0 引言
精密单点定位(precise point positioning, PPP)技术严重依赖高精度的后处理卫星轨道和钟差信息[1-3]。目前,高精度卫星轨道和钟差信息主要以事后文件的形式对外发布,存在一定时延,同时国际全球卫星导航系统(global navigation satellite system, GNSS)服务组织(International GNSS Service, IGS)发布的超快速产品,分为观测部分和预报部分。观测部分时延为3~9 h。预报部分时效性能达到实时要求,但由于相应时段的超快速预报钟差的标准偏差(standard deviation, STD)值约为1.5 ns,其精度通常不能满足实时PPP 的要求,从而大大限制了PPP 的实时应用。
为满足日益增长的实时高精度定位及应用需求,IGS 于2002 年成立了实时工作组,致力于高精度实时 GNSS 相关的基础设施建设与标准和技术规范的制定,并于 2007 年启动了实时实验计划,2013 年4 月正式推出实时服务,基于国际海运事业无线电技术委员会( Radio Technical Commission for Maritime Services,RTCM)协议和通过互联网进行RTCM 网络传输的协议(networked transport of RTCM via internet protocol, NTRIP)对外提供全球定位系统(global positioning system, GPS)和格洛纳斯卫星导航系统(global navigation satellite system, GLONASS)双系统的轨道钟差改正数,并将随着北斗卫星导航系统(BeiDou navigation satellite system, BDS)的不断发展与完善,逐步提供多系统的实时轨道和钟差产品。目前,国际上已有包括德国联邦制图与大地测量局(Bundesamt für Kartographie und Geodäsie, BKG)、欧洲航天局(European Space Agency, ESA)、法国国家太空研究中心(Centre National d’ Etudes Spatiales, CNES)、武汉 大学(Wuhan University, WHU)等多家机构,提供GPS单系统或GPS/GLONASS 双系统的实时轨道和钟差产品,其中CNES 率先于2015 年11 月开始提供4 系统实时轨道和钟差改正数。在国内,随着国际 GNSS 监测评估系统(international GNSS monitoring and assessment system, iGMAS)的不断发展,各分析中心也致力于研究多系统实时产品。
实时轨道和钟差产品的质量,直接影响了实时PPP 定位结果精度。目前已有的实时轨道和钟差产品,主要是对GPS 单系统的评估,对多系统产品的评估还不全面及细致[4-7]。同时,实时GNSS 轨道与钟差产品的计算质量,也随着实时GNSS 数据的不断丰富和各分析中心的计算方法的改进而不断提高,实时GNSS 轨道与钟差产品整体性能的提升表现出较强的时效性。
本文阐述和给出状态空间表达(state space representation, SSR)轨道、钟差产品从获取到恢复精密轨道钟差的方法,研究、分析了多个国际IGS分析中心近期BDS、GPS、GLONASS 和伽利略卫星导航系统(Galileo navigation satellite system,Galileo)4 大卫星导航系统的实时轨道钟差产品精度与稳定性,并进行实时PPP 仿动态测试。
1 实时数据获取与SSR 精密轨道、钟差恢复
1.1 实时数据获取
目前,最广泛使用的实时数据和产品获取软件为BKG 提供的开源软件布恩茨(BNC)[8],但仅支持RTCM 标准格式的数据解码,不能完全支持我国iGMAS 等相关组织、应用或研究团队根据自身需求提出的实时数据流标准。为此,笔者所在团队研制了1 套实时数据与产品获取软件——伊格格恩·特里普(IGGNtrip),该软件同时支持RTCM标准和我国iGMAS 标准,支持多地址和多挂载点4 系统的实时数据和产品解码,提供基于共享内存和格姆夫航天与防务公司(GMV Aerospace and Defense, GMV)的数据共享机制[9]。本文中所有实时数据与产品获取均采用IGGNTRIP 软件。
RTCM SC104 系列标准从3.1 版本开始支持SSR信息,用户接收到的实时轨道钟差实质上是1 组相对于广播星历的改正参数[10]。故在实时PPP 中,首先需将接收到的SSR 改正信息恢复成精密轨道和钟差。
1.2 SSR 精密轨道恢复
在RTCM 标准中,SSR 轨道改正数为地固系下卫星位置和速度在径向(radial)、切向(alongtrack)和法向(cross-track)相对于广播星历计算结果的改正量,即为

式中:IODE 表示数据龄期;δ Or、 δOa、 δOc分别表示SSR 信息0t 参考时刻卫星位置在径向、切向和法向的改正数,单位为 m;分别表示SSR 信息 t0参考时刻卫星位置在径向、切向和法向改正数的变化率,单位为 m/s; C0、 C1、 C2分别表示SSR 精密钟差信息播发的参考时刻0t 的2 次多项式拟合系数。
1)t 时刻的轨道改正δO 的计算公式为

2)卫星径向、切向和法向在地固系下的单位向 量 er、 ea、 ec计 算 式 为
式中:r、v 分别为由广播星历计算出的卫星t 时刻在地固系下的位置和速度向量。
3)将轨道改正由轨道平面坐标系转换到地固坐标系,得到SSR 改正后的精密轨道坐标,计算式为
式中:[ XbYbZb]T为利用广播星历计算得到的t时刻卫星坐标;[ X Y Z ]T为经过SSR 改正后t时刻卫星地心直角坐标。
需要说明的是,不同系统广播星历计算得到的卫星坐标在不同的坐标参考框架下,经过SSR 改正后,不同系统卫星坐标将统一到实时分析中心提供的多系统精密轨道所采用的国际地球参考框架(international terrestrial reference frame, ITRF)下。SSR 产品有 2 种参考点:卫星天线相位中心(antenna phase center, APC)和卫星质心。若采用SSR 产品参考中心为APC,则需要考虑天线相位改正,得到卫星在ITRF 下的质心坐标。
1.3 SSR 精密钟差恢复
SSR 精密钟差信息也为相对于广播星历计算结果的改正量,不同的是它播发的是2 次多项式拟合系数,则t 时刻精密钟差计算式为
式中:d tb为广播星历计算出的钟差;d tp为SSR 改正后的精密钟差;c 为光在真空中的传播速度。经过SSR 改正得到的精密钟差包含相对论效应,在实时PPP 中,应根据不同系统对应的接口控制文件提供的方法,消除相对论效应的影响。
1.4 SSR 信息与广播星历的匹配
SSR 改正信息和广播星历都以不同的时间间隔更新,它们成功匹配是正确恢复精密轨道钟差信息的关键。目前 RTCM 标准中采用数据零期(issue of data ephemeris, IODE)参数来实现SSR信息与广播星历的匹配。GPS 和Galileo 广播星历中均定义有 IODE 参数,可直接使用;对于GLONASS,目前RTCM 标准中采用广播星历中的钟差参考时间(time of clock, TOC)参数生成对应IODE 参数,计算公式为

式中:INT()为取整函数;FMOD(,)为取余函数;TOC 为广播星历对应TOC 的星期内秒;IODER为SSR 信息中的GLONASS IODE 参数。
对于BDS,目前尚无统一的标准,在CNES 和iGMAS 分析中心播发的BDS SSR 信息中,采用广播星历中3 个卫星钟差参数和15 个星历参数生成1 个24 位的循环冗余校验码(cyclic redundancy check, CRC)来作为IODE[11]。
2 多系统实时轨道钟差精度分析
基于上节给出的多系统SSR 信息恢复实时精密轨道、钟差的方法,选取了BKG 的CLK11、WHU 的CLK16、加拿大自然资源部(Natural Resources Canada,NRCan)的CLK22、ESA 的CLK51、径向(R)、切向(A)及法向(C)的CLK80、CNES 的CLK93 和IGS 的IGS03 产品,评估了多GNSS 实时轨道和钟差的精度,其中所有产品都支持GPS,CLK11、CLK80、CLK93 和IGS03 还支持GLONASS,CLK93 还同时支持Galileo 和BDS,相关产品信息如表1 所示。

表1 实时SSR 产品信息 单位:s
评估时间段为2019 年年积日第305—334 天,共30 d。评估中,GPS 选择IGS 最终产品作为参考产品,GLONASS 选用ESA 的最终产品,BDS和 Galileo 则选择德国地学中心(Deutsches Geo Forschungs Zentrum, GFZ)的多系统最终产品。在轨道比较中,统计了实时轨道与参考轨道在径向、切向和法向差异的均方根误差(root mean square,RMS)值。钟差比较则采用统计基准统一后的实时钟差和参考钟差差异的RMS 和STD 值,RMS 反映了钟差与伪距的符合程度,STD 则反映了钟差的实际解算精度,会对相位数据处理产生重要影响。另外,为了避免选取某颗参考星作为基准导致其精度信息缺失,本节中采用所有卫星重心基准,计算公式为

式中:i、 j分别为历元号和卫星号;n 和s 分别为历元和卫星数;分别为实时和事后参考钟差;Δ ti为重心基准下2 套钟差产品之间的基准差异;RMSj、 S TDj分别为对应卫星钟差RMS和STD 统计指标。
2.1 GPS 实时轨道钟差精度性能
图1 和图2 分别给出了7 家分析中心GPS实时轨道和钟差与 IGS 最终产品差异的统计情况。表2 给出了各家分析中心所有卫星精度统计指标的平均水平。可以看出,在统计时间内,各家实时轨道精度均在径向最优,法向次之,切向最差,其中绝大数卫星径向精度优于 3 cm。CLK16 在径向的精度最优,平均值为1.55 cm;在法向、切向和1D RMS 上,CLK51 精度最优,达到2.50、3.70 和2.83 cm,CLK11 最差为3.42、5.43和3.74 cm。G10 和G27 卫星轨道精度较差,可能和卫星机动有关。另外,GPS 的BLOCKIIR-A、BLOKII-B、BLOKIIR-M、BLOKIIF 卫星实时轨道精度相差不大。
钟差方面,CLK16、CLK51、CLK80 和CLk93产品精度较高,STD 值在0.15 ns 左右,其中CLK93精度最高,STD 值为0.12 ns,CLK16 次之,STD为0.13 ns;CLK11 和IGS03 精度较差,分别为0.48 和0.31 ns。各家钟差RMS 差异比较明显,CLK22 最大,为1.98 ns,CLK11 次之,为1.50 ns;CLK51、CLK80 和CLK93 的RMS 值均在1 ns 以内,其中CLK93 的RMS 值最小,为0.34 ns。钟差RMS 值差异在于不同分析中心实时钟差解算选择的站点数据和解算策略不同,在实时PPP 中,会被模糊度参数吸收。
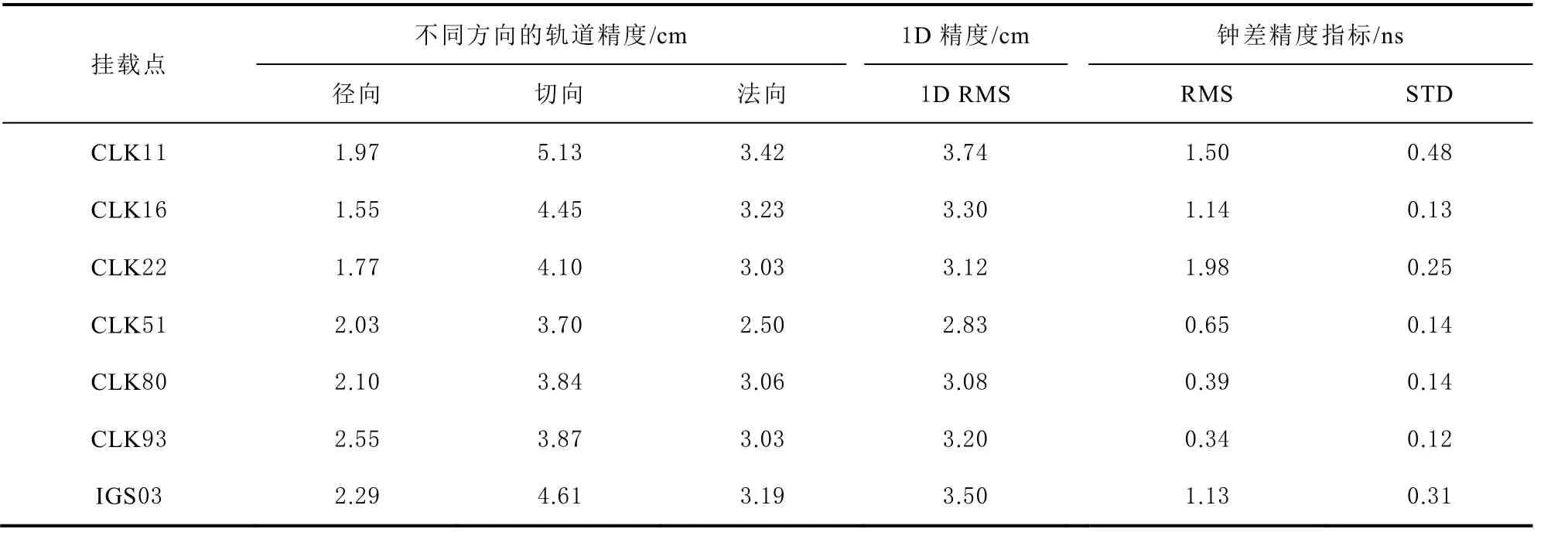
表2 GPS 实时轨道钟差平均精度统计
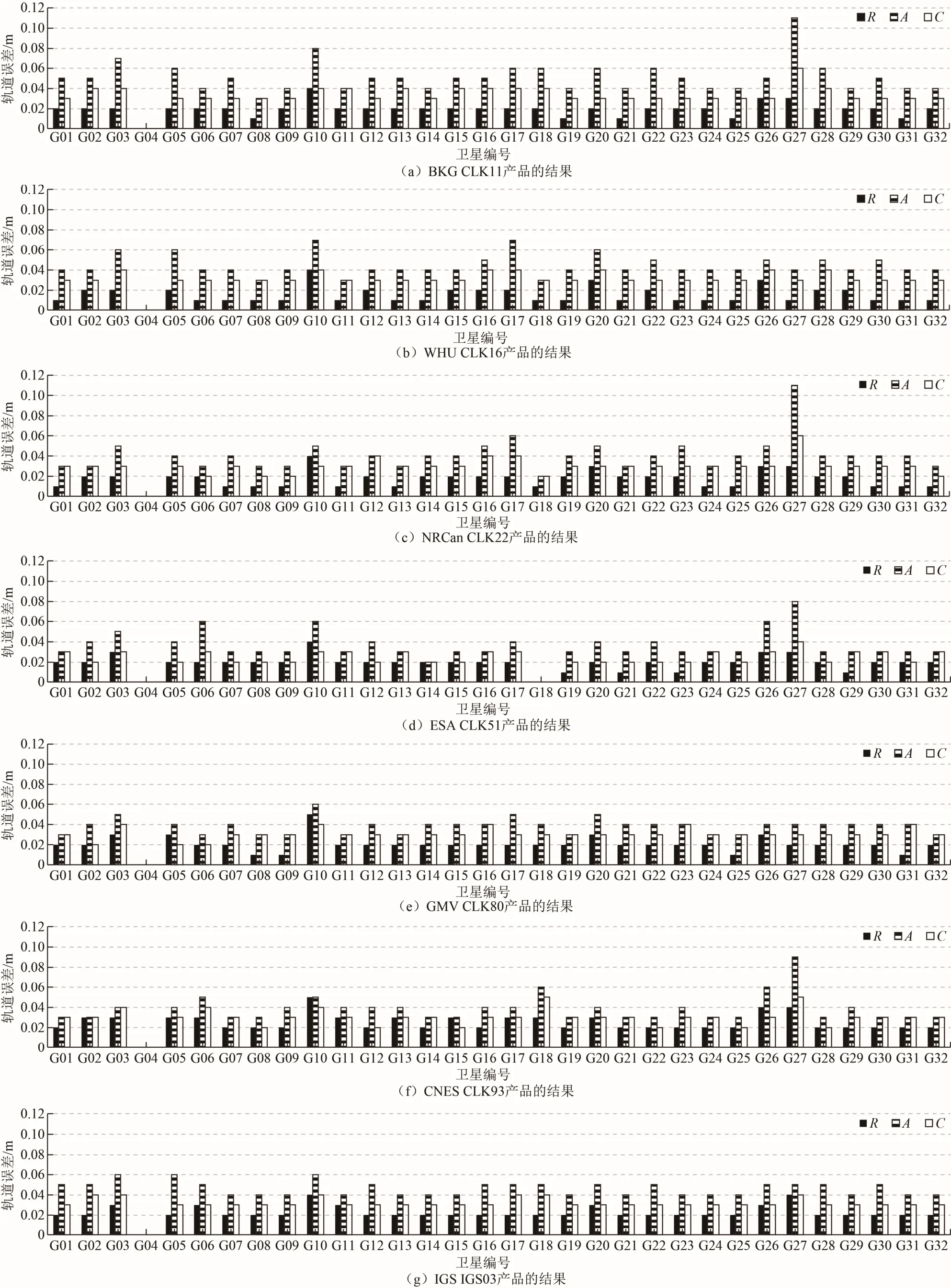
图1 GPS 实时轨道差异在径向(R)、切向(A)及法向(C)方向上的RMS 值
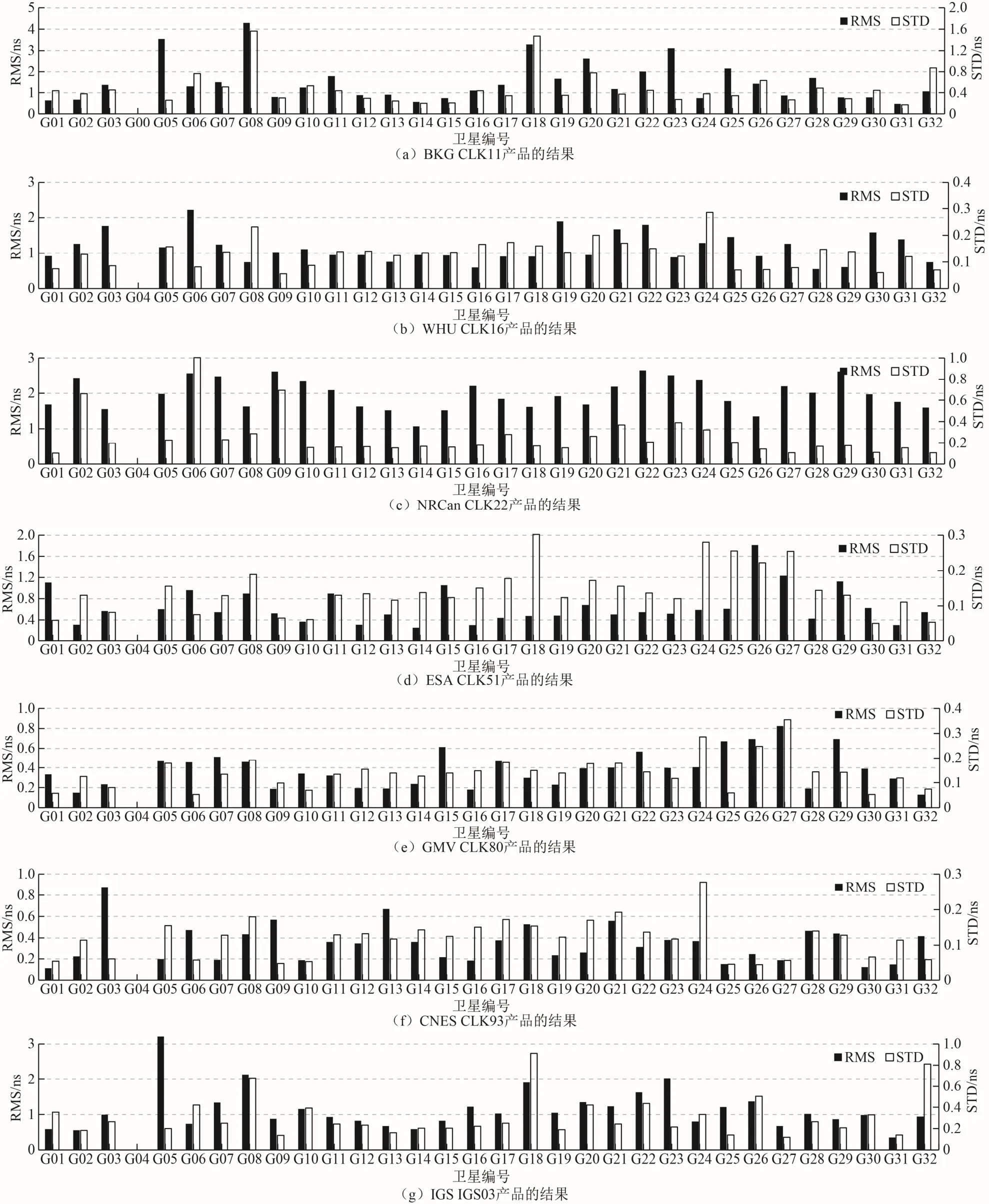
图2 GPS 实时钟差RMS 值(左轴)和STD 值(右轴)
2.2 GLONASS 实时轨道钟差精度性能
图3 、图4 分别给出了CLK11、CLK80、CLK93和IGS03 产品的GLONASS 实时轨道和钟差产品与ESA 最终产品的差异统计情况,表3 给出了对应实时产品所有卫星精度统计指标的平均水平。可以看出:与GPS 类似,4 家分析中心GLONASS实时轨道精度均在径向最优,法向次之,切向最差;所有产品径向优于3 cm;法向在6 cm 左右,切向在9 cm 左右。CLK93 产品径向和法向精度最优,平均RMS 值分别为2.24 和4.95 cm,CLK80 在切向精度最高为8.02 cm。CLk93 的1D RMS 值最小,为5.64 cm。
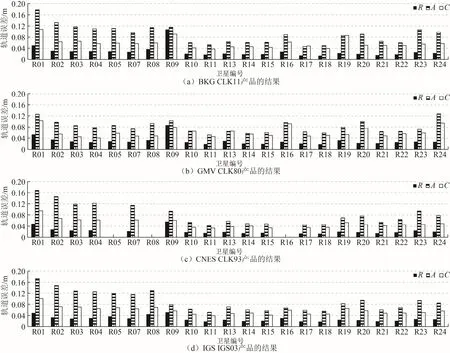
图3 GLONASS 实时轨道差异在R、A、C 方向上的RMS 值
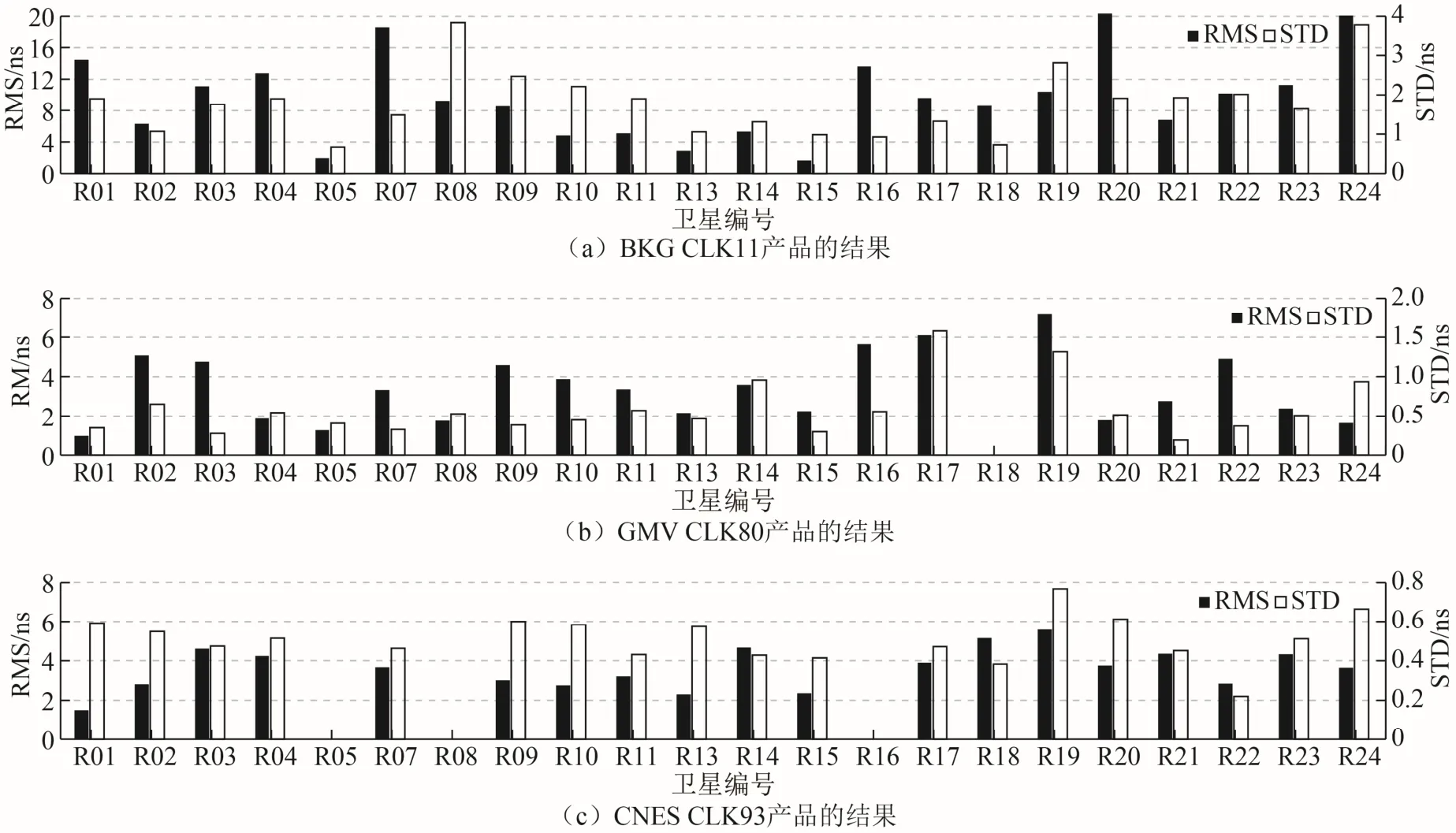

图4 GLONASS 实时钟差RMS 和STD 值
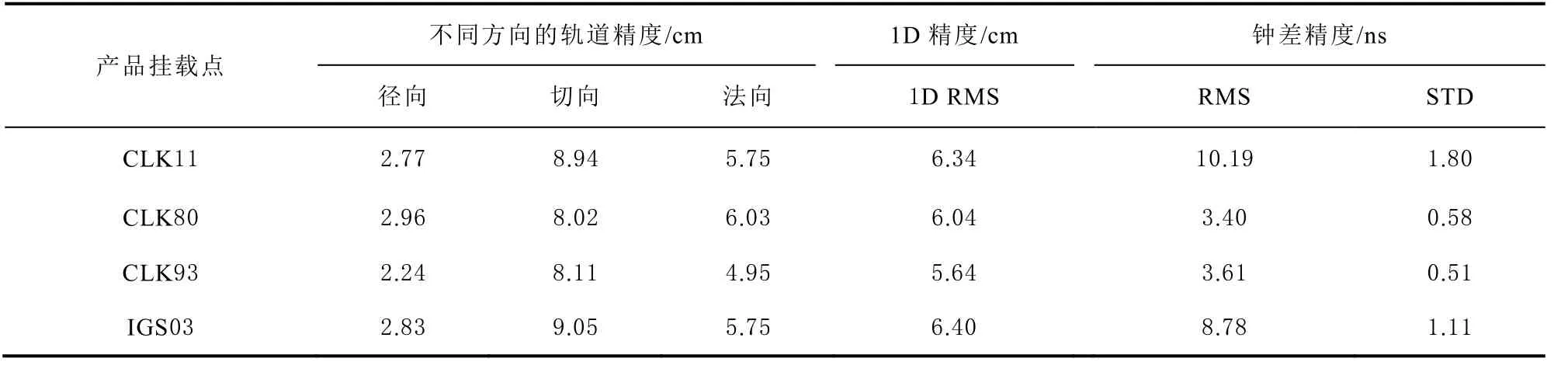
表3 GLONASS 实时轨道钟差平均精度统计
钟差方面:CLK93 的GLONASS 精度最高,STD 达到0.51 ns,CLK80 次之,STD 为0.58 ns;CLK11 和IGS03 钟差精度较差,STD 均超过1 ns,其中CLK11 精度最差,为1.80 ns。4 家分析中心钟差RMS 值差异较大,CLK93 和CLK80 的钟差RMS 值分别为3.61 和3.40 ns,而CLK11和IGS03 的RMS 值高达10.19 和8.78 ns。这可能是由于GLONASS 采用频分多址技术(frequency division multiple access, FDMA),在钟差解算时,对伪距频间偏差(inter-frequency bias, IFB)的处理策略不同[12]。
2.3 Galileo/BDS 实时轨道钟差精度性能
图 5、图 6 分别给出了 CLK93 产品实时Galileo 和BDS 轨道、钟差与GBM 最终产品差异统计情况,表4 给出了精度统计指标的平均值。从中可以看出:在统计时间内,Galileo 卫星实时轨道径向、切向和法向平均RMS 值分别为3.85、4.42 和3.46 cm;大多数Galileo 卫星轨道精度径向最高,法向次之,切向最差,但E13 和E21 卫星径向精度最差,这可能是统计时间内卫星出现异常。 CLK93 产品的 BDS 地球静止轨道(geostationary Earth orbit, GEO)卫星(编号为C01~C05)的实时轨道精度明显比中圆地球轨道(medium Earth orbit, MEO)卫星(编号为C11、C12、C14)和倾斜地球同步轨道(inclined geosynchronous orbits, IGSO ) 卫 星( 编 号 为C06~C10、C13)差,径向、切向和法向平均RMS卫星值达到46.05、76.43 和121.75 cm。MEO 和IGSO 卫星轨道各方向RMS 值没有明显的差异,在径向、法向和切向差异的平均 RMS 值分别为4.74、12.77 和10.19 cm。钟差方面,Galileo 卫星实时钟差平均STD 值和RMS 值分别为0.31和1.05 ns,都优于BDS。BDS 的IGSO/MEO 卫星实时钟差平均STD 值和RMS 值分别为0.76和3.98 ns,优于GEO 卫星钟差。整体而言,BDS的实时轨道、钟差精度仍有较大提升空间。

表4 CLK93 产品Galileo/BDS 实时轨道钟差平均精度统计
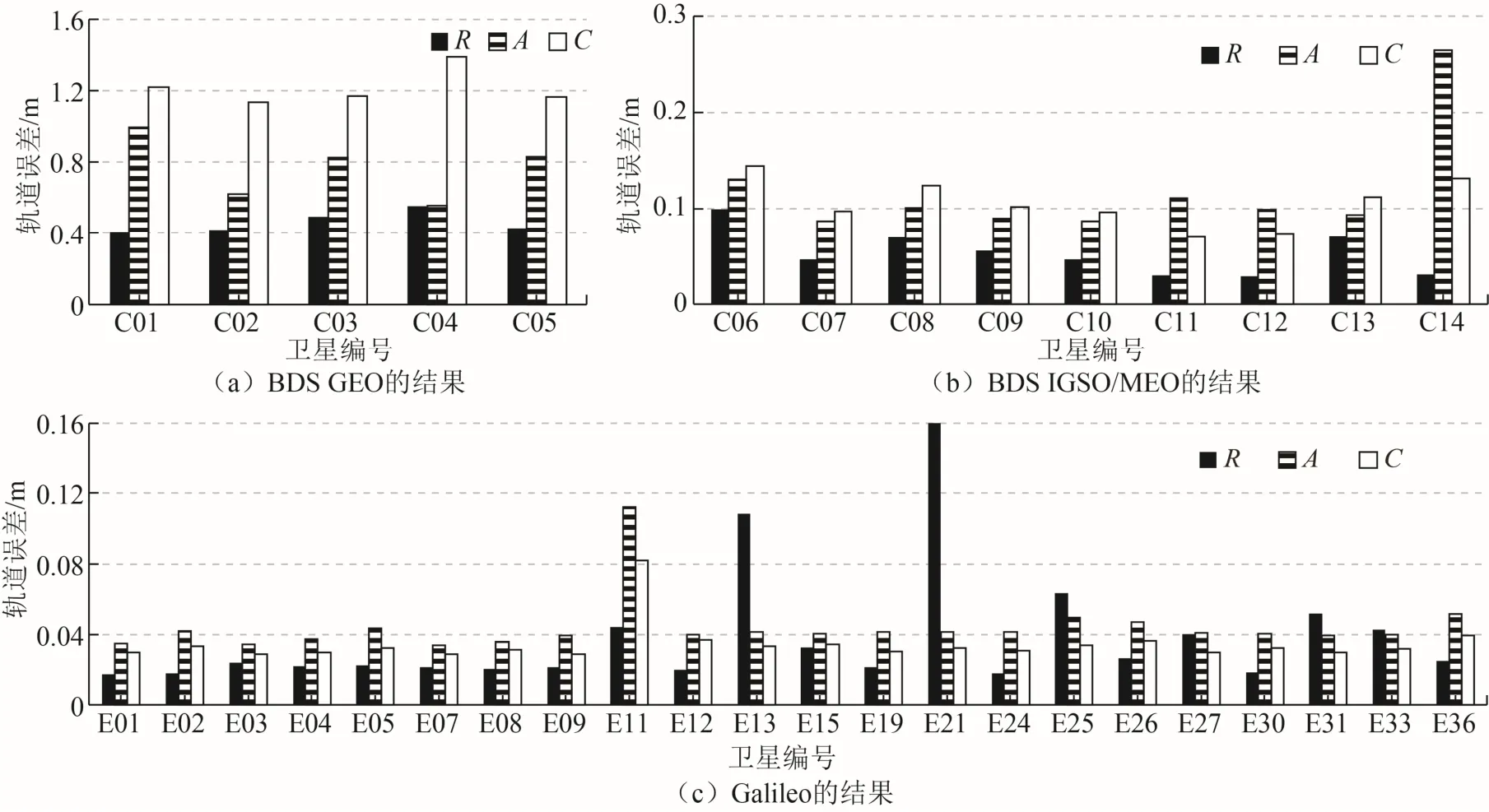
图5 CLK93 产品Galileo/BDS 系统实时轨道差异R、A、C 方向RMS 值

图6 CLK93 产品Galileo/BDS 系统实时钟差RMS 值和STD 值
2.4 实时轨道跳跃
以CLK93 产品为例,给出了实时轨道产品恢复精密轨道后与事后精密轨道产品单天在径向差异的时间序列(如图7 所示),其中GPS 给出了G01~G06 卫星结果,GLONASS 给出了R01~R06卫星结果,Galileo 给出了E01~E05 卫星结果,BDS给出了C06~C10 卫星结果。从图7 中可以看出,CLK93 产品4 个系统实时轨道均存在明显的跳跃现象,其中 GPS 和GLONASS 卫星大约每6 h 出现1 次跳跃,BDS 和 Galileo 卫星大约每3 h 出现1 次跳跃,如图7 中虚线所示。出现这种跳跃的原因是目前实时轨道主要采用超快速轨道的预报部分,而超快速轨道1 d 会更新多次,同一时刻卫星轨道在不同弧段预报精度不同,因此在弧段切换时,会出现不连续的现象,这种不连续的时间间隔与超快速轨道的更新间隔一致。
3 实时PPP 仿动态定位性能分析
通常,静态参考站的观测数据受周跳、多路径和信号中断的影响较少,因此,当需要利用实时静态数据进行仿动态PPP 定位时,静态站数据的PPP定位性能一般可被认为是相应的真实动态PPP 模式所能达到的最佳结果。实验中,选取了8 个IGS参考站,进行了单GPS 实时PPP 仿动态测试。

图7 CLK93 实时轨道与参考产品径向差异时间序列(年积日为第310 天)
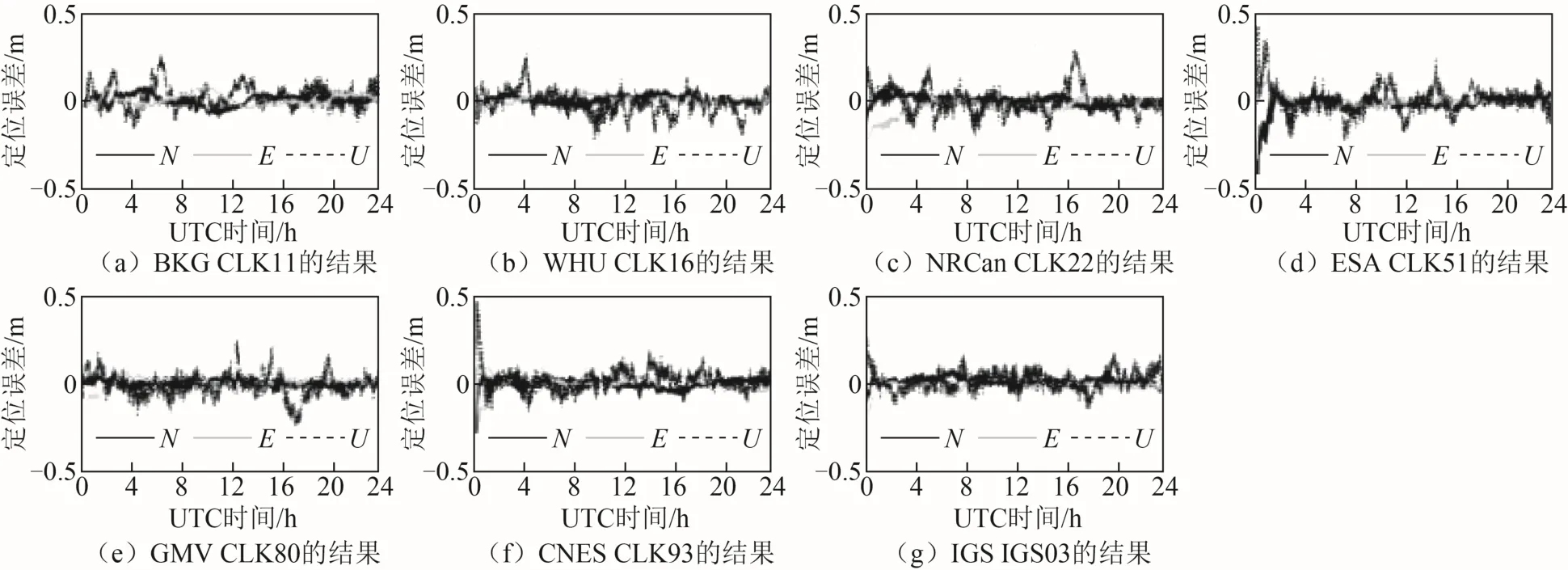
图8 IGS 站点单GPS 实时PPP 定位误差N、E、U 方向时间序列
实验中采用了中科院测地所GNSS 团队刘腾博士开发的PPP 数据处理软件姆格普(MGP)。该软件能够支持多GNSS 系统、多PPP 模型和多处理模式,具有众多技术特色和良好的定位与应用性能[13]。本文综合利用MGP 和IGGNTRIP 软件,以共享内存方式获取实时原始数观测数据、广播星历和SSR 产品,进行实时PPP 解算。这里以BRST 站为例,处理策略如表5 所示,选取了时间段 2019-11-06 UTC 00:00:00—2019-11-07 UTC 00:00:00,分别用各分析中心实时产品进行定位,以IGS 发布的站点精密坐标为基准,计算北(N)、东(E)、天顶(U)顶方向定位误差。误差序列如图 8 所示,横坐标为世界协调时(coordinated universal time, UTC),纵坐标为定位误差,不同子图表示不同分析中心产品的定位结果。测试时间段内,除了CLK51,其他各产品PPP 收敛时间均小于0.5 h;所有产品的平均定位精度各方向均优于10 cm。

表5 实时PPP 处理策略
图9 为各分析中心测试周期内所有IGS 站实时PPP 仿动态平均定位误差。从图9 中可以看出:CNES 的CLK93 产品在N、E、U 方向上平均定位精度最高,别为1.93、3.05 和6.03 cm;其他产品N、E、U 方向上平均定位精度RMS 值分别在3、4和8 cm 左右。总体来看,实时产品PPP 仿动态模式定位误差在10 cm 以内。

图9 单GPS 实时PPP 各产品IGS 站N、E、U 方向平均定位误差
4 结束语
本文系统分析、评估和研究了GNSS SSR 实时轨道、钟差产品的性能,结果表明:GPS、GLONASS、Galileo 卫星轨道精度分别在2、3、4 cm左右,BDS MEO/IGSO 卫星实时轨道精度在9 cm左右;BDS GEO 卫星精度较差,RMS 值在0.8 m左右;实时钟差精度在亚纳秒级。总体来看,GPS实时轨道和钟差产品精度优于其他3 个系统。同时,随着各分析中心实时产品生成算法的发展,产品精度也随之提高,总体表现出了较强的时效性;另一方面,实时轨道存在明显的跳跃现象,其中GPS 和GLONASS 卫星大约每6 h 出现1 次跳跃,BDS 和Galileo 卫星大约每3 h 出现1 次跳跃。这种跳跃现象的出现通常是因为同一时刻卫星轨道在不同弧段预报精度不同,而超快速星历更新在弧段切换时出现不连续,这种不连续造成的轨道误差通常会被测距误差吸收。
选取的8 个IGS/MEGX 站的单GPS 实时PPP仿动态测试结果表明:测试时间内,各产品实时PPP 收敛时间在0.5 h 左右。各产品所选测站的N、E、U 方向平均定位精度分别在3、4 和8 cm 左右,其中CLK93 产品相对较高。
必须指出的是,本文所进行的测试仅基于30 d的实时产品。后续研究将使用更长时间的产品,同时还需要增加对北斗三号卫星实时产品性能进行更加全面、系统的研究和分析。
