面向应急的星空地协同数据采集机制及实现
2021-01-05申顺发杨树文张萌生
申顺发,杨树文,贾 鑫,张萌生
(兰州交通大学 测绘与地理信息学院/地理国情监测技术应用国家地方联合工程研究中心/甘肃省地理国情监测工程实验室,兰州 730070)
0 引言
随着对地观测技术的发展,对于重大灾害的监测已从单一平台监测发展到星空地平台联合观测网共同监测的新时代[1-3]。目前,观测任务对速度、准确性及高效性等方面提出了更高要求,但星空地平台各具特色,由于不同类型传感器自身功能特性与机理的差异,平台间缺乏关联,协同调度配合难度大[4]。因此,如何高效联合星空地平台进行对地协同观测,并在重大自然灾害监测发挥重大作用仍然是1 个难题。
应用中,根据不同的观测任务与需求,不同的观测调度系统会有不同的服务模式,主要包括3 种模式[4]:基于查询处理的观测服务,代表系统有库加尔(COUGAR)[5]和蒂尼·德布(Tiny DB)[6];基于定时器驱动的观测服务,代表系统有蒂尼·林梅(Tiny Linme)[7]和蒂尼·库布(斯Tiny Cubus)[8];基于事件驱动的观测服务,代表系统有德斯韦尔(DSWare)[9]。
在星空地协同立体观测方面,研究人员做了大量卓有成效的工作。为了有效利用对地观测资源,避免资源的浪费,文献[10-12]提出了空天对地观测协同规划的框架并从平台规划中心的角度,利用线性规划技术对问题进行求解。目前,该任务规划框架得到了较多的认可,很多学者基于此框架,进行空天观测资源任务规划。文献[13]对空天资源分配做了综合分析,研究了基于市场模型的异构多智能体系统(multi-agent system,MAS)协同任务规划方法;文献[14]提出1 种基于分而治之框架的2 阶段迭代优化方法,设计任务分配的启发式准则,将任务合理分配给各子规划中心,来解决空天观测资源协同任务规划问题;文献[15]设计了多类异构器协同任务框架,根据不同异构器资源的观测能力,将目标区域进行分解,并提出基于任务冲突启发式的任务分配方法;文献[16]构建了面向海上移动目标的空天协同连续观测模型,文献[17]提出了基于武器装备体系统一建模平台(unified platform of defense model, UPDM)的空天协同观测体系模型构建,对海上移动目标进行协同观测,用以解决海上移动目标的观测问题。
为了满足应急事件响应速度需求,高效利用空天异构传感器进行任务规划,文献[18]提出了多源异构传感器调度多目标优化模型,来解决观测时间碎片化等问题;文献[19]提出了1 种基于合同网协议的对地观测资源动态协同规划框架,以解决应急规划中多类资源协同规划问题;文献[20-21]以开放地理空间信息联盟(Open Geospatial Consortium, OGC)传感网、传感器建模语言(sensor model language, Sensor ML)信息模型标准化为基础,提出了应急对地观测传感器集成管理方法,对传感器资源进行高效管理;文献[22]提出星空地平台在应急场景下的无线资源分配算法;文献[23]提出1 种基于多智能体系统(multi-agent system,MAS)的分层协同规框架,在任务分配算法中,设计了最大权重任务优先分配算法和模拟退火算法来整合平台调度;文献[24]提出了1 种基于遗传算法的星空地平台资源部署方法,将多平台部署问题看作1 个组合优化问题,以达到最大观测覆盖率。文献[25]基于事件驱动的对地观测任务协同规划模型,将地基平台纳入规划范围,对观测平台资源进行编号,基于观测时间、观测空间以及观测需求出发构建数学模型,实现了星空地平台协同求解。然而,该方法未能将应急事件区域的自然条件等实际要素纳入考虑范围。
本文根据星-空-地各平台自身特性,综合考虑气象、交通等条件对各平台执行任务的限制,提出1 种星-空-地应急响应协同数据采集机制,并构建相应的应急调度模型。开发星空地平台任务调度系统,旨在更贴合应急调度需要,使决策者更为直观地了解目标区域的实际情况,获得更直观的任务调度参考。
1 星-空-地应急响应协同数据采集机制
随着对地观测技术的不断发展,以及灾害事件的评估和救援响应的不断提高,单一的传感器平台各具优势,但往往难以满足观测任务需求,需要各平台之间相互协助,优势互补。
根据文献及实验总结,不同平台在满足对地观测需求时存在的优势与不足,如表1 所示。
星空地应急响应协同旨在发挥各平台特性的基础上,平台之间工作相互增强,形成一体化的规划格局。每个传感器都具有独立的事件感知和观测能力,但由于各平台传感器在应用目的和应用范围等方面存在很大的不同,单一传感器无法满足协同观测任务需求。因此,需要构造事件、传感器、决策调度模型相互联系的观测体系,使协同观测系统相互关联,提供星空地平台设备的合理布局,有效地解决目前观测系统及时性不够、工作被动、资源“既多又少”等瓶颈问题,实现高效的、动态适应的观测系统,满足陆表监测的综合性需求、实现快速应急响应。常规的空天调度模型,以充分利用、合理调度为准则,通过模型与算法,使现有资源调度最优化,但少有研究将地面平台纳入协同规划范围。因此,与一般的空天调度模型不同的是,本文将地基设备纳入考虑范围,并将事件位置自然条件做为平台调度的影响因子,使应急调度方案更加贴合实际,满足合理的应急协同需求。

表1 星空地平台观测资源优劣势
根据各平台的功能特性以及服务范围,本文设计了具体的星-空-地应急响应协同数据采集机制,如图1 所示。在应急事件发生后,各平台同时响应事件启动应急方案,在根据事件发生位置获取到事件信息后,星-空-地平台根据自身资源的功能特性以及服务范围对天气、地形及交通等因素进行影响评估,判断现有资源在当前条件下是否满足应急响应条件,从而筛选出符合任务条件的观测平台执行应急观测,制定观测计划,由此达到快速救援和灾害评估的效果。
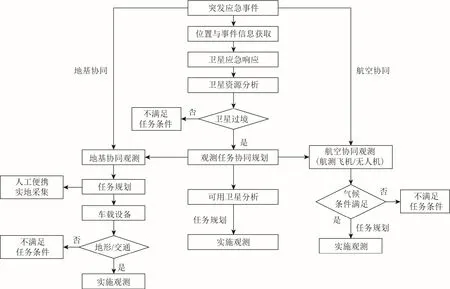
图1 星空地数据协同获取局势实施流程
2 星空地数据协同获取模型
2.1 模型构建
数据协同获取的根本目的是针对事件位置的自然条件等约束,快速获取事件位置灾害信息,以满足应急救援以及灾害评估的需要。由此,对协同调度模型要素做如下定义:
1)任务观测平台集合表示为Xi(i=1, 2, 3, 4),其中,X1为星基平台,空基平台包含无人机X2以及航测飞机X3,X4为地基平台;
2)事件位置经纬度坐标信息表示为(lng,lat);
3)事件发生时间定义为T0,Ti表示平台Xi的观测时间窗满足应急响应需求;
4)事件位置自然条件集合定义为Nj=[N1,N2,N3,…,Nk],可为风力等级、天气状况、能见度、温度等,可得

式中:Xi(i=1, 2, 3, 4)为相应的观测平台;XiNj为观测平台执行任务时的单项自然限制条件,若任务观测满足单项自然限制条件,则XiNj取1,反之,若任务观测不满足单项自然限制条件,则XiNj取0。
式中:当Pi为1 时,表示当前观测平台在事件位置当前自然条件下满足任务条件,可以进行任务调度;反之,当Pi=0 时,则表示当前观测平台不满足执行应急观测任务的条件。另外,地面平台几乎不受自然条件影响,一般情况下,P4取1。
由于无人机平台与地面设备平台的特殊性,受道路通畅性影响程度大,卫星平台与航拍飞机不受交通条件限制,则

式中Gi表示事件位置的道路通畅度,若在当前交通条件下平台Xi能够到达事件区域,Gi为1,反之,则为0。
2.2 协同求解
由于各平台均能获得事件区域的观测信息,但平台相互之间关联不紧密,要实现对地表的协同观测,是在已有平台资源条件下,以各平台任务的可调度性为准则,实现对事件区域观测的应急响应,由此,本文构建的协同求解过程为

式中:当Ti、Gi、Pi为1 时,表示当前观测平台满足执行应急观测任务的条件,可以进行任务调度;反之,当Ti、Gi、Pi为0 时,则表示当前观测平台不满足执行应急观测任务的条件。
由此,星空地协同任务调度流程可以描述为:
第1 步,当应急事件发生后,获取当地经纬度坐标;
第2 步,将所获取的经纬度坐标作为参数进行输入,进而获取相应事件信息集合;
第3 步,根据平台自身功能特性以及当时的自然因素、交通状况等条件,从平台集合X 中选取能够执行应急观测任务的平台,实现应急任务调度。
调度过程如图2 所示。

图2 协同调度算法流程
3 星空地平台任务调度系统设计与仿真实验
3.1 平台系统设计
根据本文构建的星-空-地应急响应协同数据采集机制和算法模型,本文采用C++语言,依托Microsoft Visual Studio 2012 软件、高德地图api,设计并实现了星空地平台任务调度系统。系统主要分为3 个部分:参数输入、综合判断、结果显示。系统功能结构如图3 所示。
应用中,查询者将获取的事件位置经纬度坐标、救援车辆起始位置作为参数输入系统,系统根据参数信息可以获取到事件位置的影像定位以及位置的实时信息(气象、交通信息)。通过系统解算与判断以及各平台的不同应用范围与特征,得到各平台进行任务的可执行性。此外,若车载平台满足应急任务条件,系统根据路况信息,为车辆进行不同方案的路径规划,满足任务的多种需求。通过对解算结果(影像定位、气象信息、路径规划等)的可视化显示,查询根据结果信息进行快速的应急任务调度,以满足任务的快速应急响应需求。
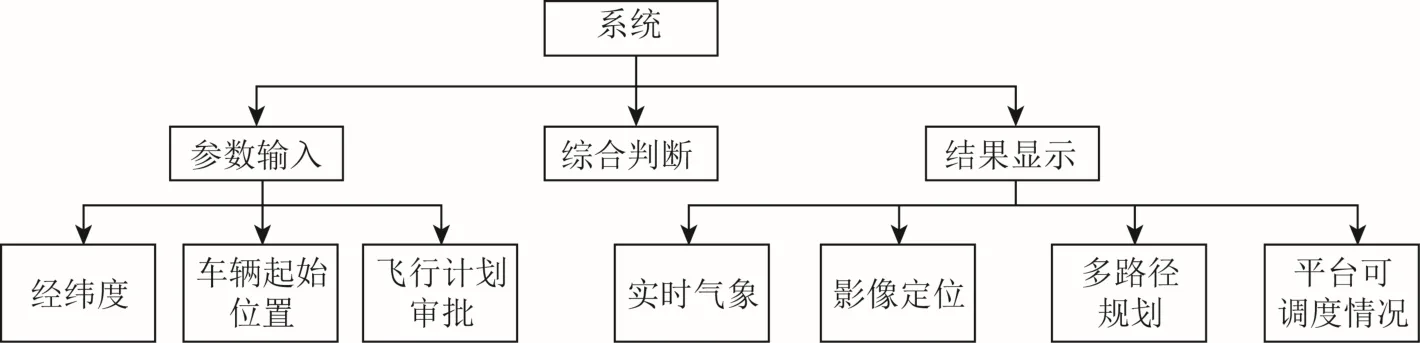
图3 系统功能模块
3.2 仿真实验
为了验证所提出的模型与算法的有效性和可行性,本文构建2 个仿真实验,分析在不同自然条件下各平台观测资源的可调度情况。
3.2.1 地震仿真实验
2019-06-17 , 在四川省宜宾市长宁县(28.34°N,104.90°E)发生6.0 级大地震,以此为例验证本文构建模型及算法的可行性。地震发生时刻为T0,但由于地震发生时间在夜间,各平台数据获取受限,为了尽快了解灾区情况与相应信息,做出快速准确的判断以及应急救援安排,先行派遣人员进行任务出动,待天亮采取应急任务调度。本文以重庆市长宁县公安消防大队为车辆出发起始点,输入灾害区域的坐标信息,如图4所示。
由此,应急目标区域为:经度为104.90°E,纬度为28.34°N,车辆起始点:宜宾市长宁县消防宋家坝支队,模拟飞行计划已通过审批,应急中间调度过程如图5 所示。
应急调度计算结果如图6 所示,计算时间为540 ms。从结果界面可知N=[dy,wd,fl,njd],其中:dy 为多云天气;wd 为温度,wd=27 ℃,fl 为当地风力等级,fl=1 级;njd 为当地能见度距离,njd=17 km。通过网络api 服务,获知此时有卫星经过长宁县上空,且从车辆起始位置至事件区域有通畅线路。

图4 长宁县地震平台行进路线

图5 应急任务调度查询
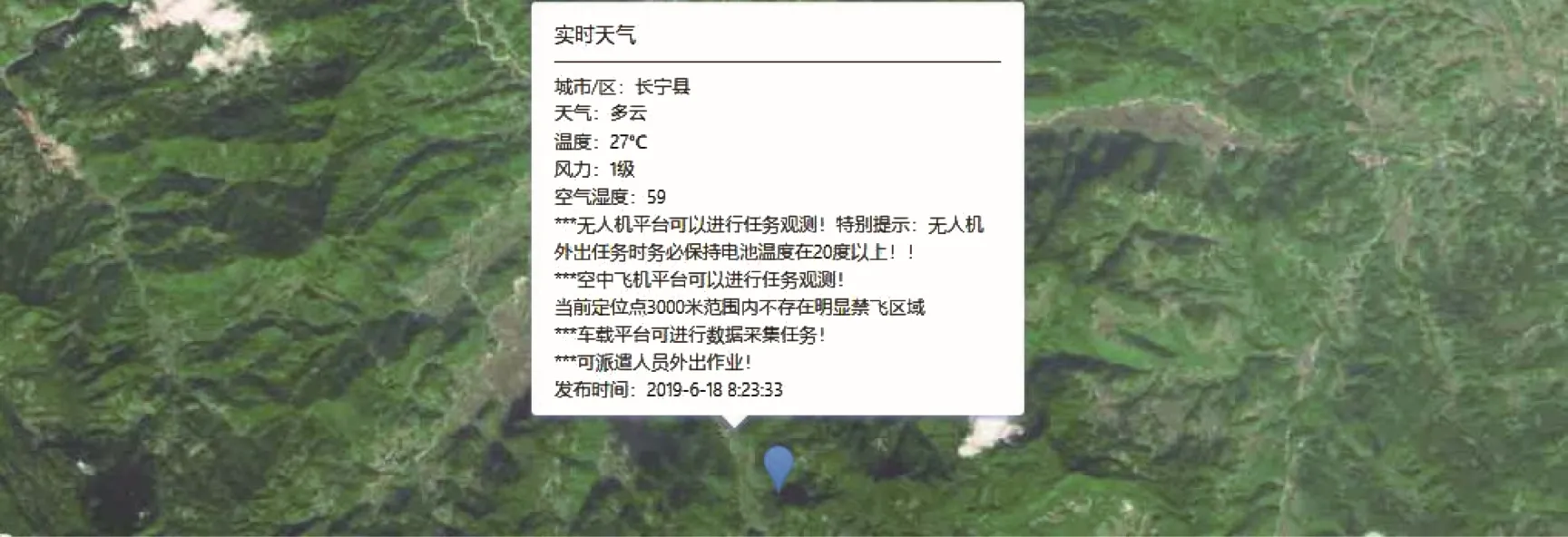
图6 长宁县地震平台调度情况图
将各参数输入协同求解模型,获得相应结果矩阵为
即

通过分析,在当前自然环境条件下,4 种观测平台皆可进行任务调度以及应急观测,此时有卫星经过长宁县上空,且观测时间窗符合,由此,卫星平台状态值为1;地面道路受损程度较小,有可供选择的通畅线路可正常开展应急救援工作,故地面平台开展任务状态值为1;期间当地气象条件良好,能见度较高,空中平台飞行计划获得审批,目标区域半径3 km 范围内不存在明显的禁飞区域,空中平台以及无人机平台状态值为1,可进入观测状态,所以各平台的可执行任务调度矩阵为

所以,经过本文应急模型仿真实验得到的调度结果为:卫星平台X1、航测飞机平台X2、无人机平台X3、地面观测平台X4都可进行应急任务调度。
3.3.2 滑坡泥石流仿真实验
2019-07-20,在云南省昭通市大关县悦乐镇(27.822°N,103.782°E)发生大范围滑坡泥石流灾害,为了尽快了解灾区情况与相应信息,做出快速准确的判断以及应急救援安排,本文以昭通市大关县消防总队为车辆出发起始点进行输入,并输入灾害区域的坐标信息,如图7 所示。

图7 大关县光石流平台行进路线
应急目标区域为:经度为103.782°E,纬度为27.822°N,车辆起始点:昭通市大关县消防总队,飞行计划已获得审批。
图8 为应急调度计算结果,计算时间为510 ms。从结果界面可知N=[zy,wd,fl,njd],其中:zy 为中雨;wd 为温度,wd=20℃;fl 为当地风力等级,fl=1级;njd 为当地能见度距离,njd=13 km。通过网络api 服务,获知此时有卫星经过悦乐镇上空,且从车辆起始位置至事件区域有通畅线路。
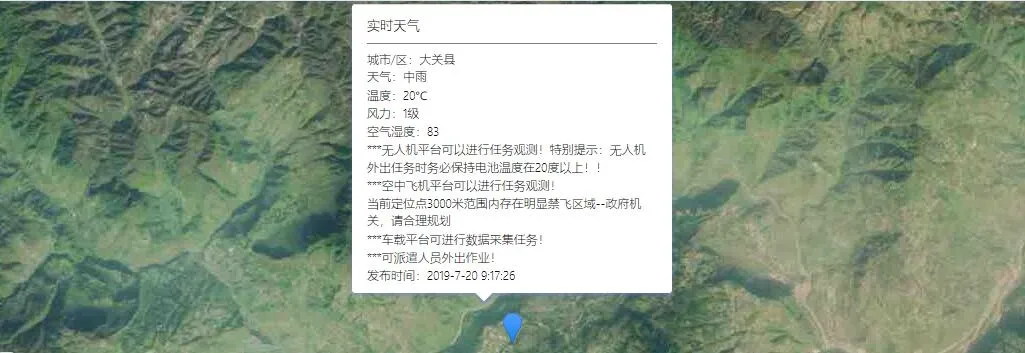
图8 大关县泥石流平台调度情况
将各参数输入协同求解模型,获得相应结果矩阵为
即
在当前自然环境条件下,有卫星经过大关县上空,可以通过调整侧摆角度进行及时的应急调度,故此时,卫星平台状态值为1;由图8 可见,有可供选择的通畅线路从车辆起始点到达目标区域,可正常开展应急救援工作,故地面平台开展任务状态值为1;能见度较高,空中平台飞行计划获得审批,目标区域半径3 km 范围内存在明显的禁飞区域,在合理规划的前提下,空中平台状态值为1,可进入观测状态,但由于大关县降雨持续,无人机平台不能及时进行调度,所以无人机平台状态值为0。所以,经过本文应急模型仿真实验得到的调度结果为:卫星平台X1、空中飞机平台X2、地面观测平台X4可进行应急任务调度。
4 结束语
星空地协同数据采集能够在应用目的与应用范围上起到互相增强与补充的作用,更为全面地达到应急响应的目的。本文提出的星空地应急响应协同数据采集机制,从事件区域实际情况出发,构建应急调度数学模型进行协同求解,并在此基础上构建了星空地平台任务调度系统。与以往的星空地平台任务调度方法不同的是,本文将星空地平台在进行调度时,考虑自然条件作为任务调度的参数条件,同时考虑实时的交通路况信息,较为贴合应急事件区域的实际情况,更为贴合决策者的需求,可提供更可靠的任务规划依据。从救灾与灾情应急评估需求出发,本文通过仿真实验探讨了在不同的气候条件下各平台执行任务的可行性,为不同灾害条件下的救援调度提供了参考。
进一步研究将会在考虑自然条件和各平台特性的基础上,将目标区域复杂的空间因素纳入考虑,并结合平台设备任务收益,选取收益更为高效的调度安排,以使得本方法能为平台任务调度提供更为可靠的调度依据。
