全路面附着系数的EPS系统控制策略研究
2021-01-05何杰
何杰
全路面附着系数的EPS系统控制策略研究
何杰
(长安大学汽车学院,陕西 西安 710064)
传统的EPS系统能够满足在一般路面上的行驶转向要求,但是对于低附着系数或附着系数变化复杂的路面,传统的EPS控制策略难以满足转向需求,因此文章基于对路面附着系数的估计,提出了一种考虑全路面附着系数的电动助力转向系统控制策略,并在Carsim和Simulink中搭建了EPS系统控制模型进行联合仿真。仿真结果表明:考虑全路面附着系数的EPS控制策略能够明显改善车辆的操纵稳定性,提高车辆的行驶安全性。
EPS系统;路面附着系数;控制策略;联合仿真
前言
随着汽车技术的大力发展,车辆上传统的机械式转向和液压式转向系统已经逐渐被电动助力转向系统(EPS)所取代,由于电动助力转向系统能很好地解决转向时“轻”与“灵”的矛盾,越来越多的车辆开始装备EPS系统,而且EPS系统的性能也逐渐完善。
EPS控制策略作为电动助力转向系统的核心,直接决定着车辆的操纵稳定性能。目前对EPS控制策略的研究主要考虑转向盘力矩、车速及转向盘转角对EPS系统的影响,关于路面附着系数对EPS系统影响的研究较少。传统的EPS系统能够满足在正常路面上的行驶转向要求,但是对于低附着系数或附着系数变化复杂的路面,传统EPS系统难以满足转向需求。在低附着路面上,转向阻力矩会大幅降低,如果EPS系统仍按照附着系数良好情况施加助力矩,会降低驾驶员操纵力矩、使转向角偏大,影响EPS系统助力效果和车辆行驶安全[1]。对于此问题,文献[2]利用自回正力矩估计路面附着系数并据此设计助力控制策略,利用时变滑模变结构控制进行回正控制,改善回正时的手感。文献[3]利用横摆角速度与轮速实时估算当前附着系数,并设计了基于模糊控制的电流补偿助力控制器,提高了路感。文献[4]采用扩展卡尔曼滤波估算低附着路面下前轴侧向力,通过与参考模型获得的正常附着系数下的理想前轴侧向力的反馈控制对助力电流进行补偿。
本文将路面附着系数加入EPS控制策略的考虑因素中,对车辆在不同路面附着系数下的转向特性进行研究。基于对路面附着系数的估计,提出了一种考虑全路面附着系数的EPS系统控制策略,并通过联合仿真对提出的EPS控制策略进行了验证。结果表明考虑全路面附着系数的EPS控制策略可明显改善车辆的操稳性,增强驾驶员的路感,使车辆行驶更安全。
1 EPS系统Carsim和Simulink联合仿真模型
为了对EPS系统进行更加精确的仿真,本文根据某汽车的参数在Carsim内建立了车辆动力学模型,并在Simulink中建立了EPS系统模型,然后进行Carsim和Simulink的联合仿真。其中车辆动力学模型采用的是Carsim提供的27自由度的车辆动力学模型。
1.1 EPS系统模型
所建立的EPS系统模型主要包括三个模块:扭杆弹簧模块、助力曲线模块和助力电机模块。其中助力曲线模块会在控制策略章节进行详细介绍,此处主要讨论扭杆弹簧模块和助力电机模块。
本文对EPS系统的转向柱输入轴进行了受力分析,如图1所示,转向柱的输入为转角输入,故可将转向柱输入轴等效为扭杆弹簧模型[5]。
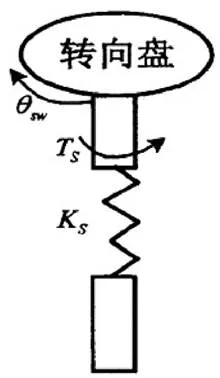
图1 扭杆弹簧模块受力分析
根据受力分析和扭杆弹簧的性质可知:扭杆弹簧处产生的扭矩T是扭杆弹簧上下两端产生的转角之差与扭杆弹簧刚度的乘积。所以有:

式中:Ts为扭杆弹簧产生的扭矩,Ks为扭杆弹簧刚度,θsw为转向盘转角,θca为扭杆弹簧下端转向柱转角。
助力电机模块本文采用的是永磁直流电机,对助力电机也进行了受力分析,如图2所示,则可得:

式中:T为助力电机输出的助力矩,T为转向柱中的摩擦阻力矩,对于摩擦阻力矩有[6]:

式中:K和K为摩擦阻尼补偿控制系数,ω为电机的转速。
1.2 Carsim车辆模型及联合仿真模型
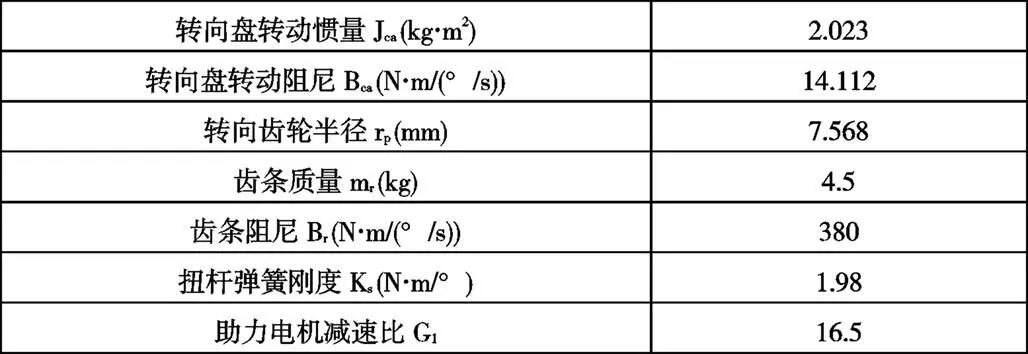
将Carsim中车辆模型的转向系统设置为纯机械转向,本文所采用的车辆模型的转向系统部分参数如表1所示。
表1 车辆模型的转向系统部分参数
根据EPS系统模型和车辆动力学模型的分析结果,建立起联合仿真模型,如图3所示。在Simulink中根据试验要求的工况,进行转角输入,经过转向管柱等效的扭杆弹黃模块后输出操纵力矩,操纵力矩和Carsim模块输出的车速信号同时输入给助力曲线模块,助力曲线模块根据设定的助力特性曲线输出相应的助力电流,助力电机模块根据此助力电流信号输出相应的助力转矩和电机转角。
2 全路面附着系数EPS控制策略设计
当车辆在附着系数较低的路面上行驶时,由于路面附着系数降低会导致转向阻力矩也大幅降低,如果EPS控制策略没有考虑到转向阻力矩的大幅下降,仍按照附着系数良好情况施加助力矩,会降低驾驶员的操纵力矩,造成路感变差和过多转向等,车辆操纵稳定性大幅降低,影响行车安全。本章节通过支持向量机算法对路面附着系数进行预测,然后将车速、转向盘力矩和路面附着系数作为输入因素,从而建立起三输入的电动助力转向系统控制策略。
2.1 基于支持向量机的路面附着系数估计
本文所提出的控制策略需要实时获取路面附着系数的变化情况,对于路面附着系数的获取工作,文献[7]提出了基于车轮侧偏特性并利用扩展卡尔曼滤波器估计路面附着系数的算法,文献[8]利用不同路面材质的激光反射强度的不同,设计了路面附着系数估计模型,运用联合概率思想,对附着系数进行估计。上述对附着系数进行估计的方法在实时性上有好的表现,但在精度上难以达到预期的要求。本文提出的基于支持向量机算法的路面附着系数预测模型,不仅能实时获取路面附着系数,同时也能保证一定的精度要求。
支持向量机是建立在结构风险最小原理和统计学理论的VC维理论基础上的一种机器学习算法,它在解决模式识别(判别分析、分类问题)和回归问题上有很大的优势[9]。以两类数据的分类为例,支持向量机的目的在于寻找一个最优分类超平面,如下图4所示。该超平面上的点满足:

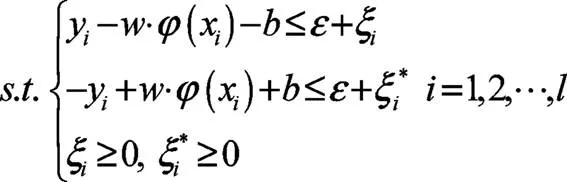
该最优超平面的目的在于使分类界限边缘两类的间隔最大化,故问题可以等价为:

可以通过引入拉格朗日函数来解决这类约束最优化问题,如下式所示。

式(7)中a是拉格朗日乘数,且a>0。在此需要使用拉格朗日函数的对偶性,将二次规划问题等价为相应的对偶问题,如下所示。


为了利用支持向量机解决回归拟合方面的问题,在支持向量机分类的基础上引入了不敏感损失函数,从而得到了回归型支持向量机(SVR),如图5支持向量回归的参数所示。其基本思想不再是寻找一个最优分类面使得两类样本分开,而是寻找一个最优分类面使得所有训练样本离该最优分类面的误差最小,即:
2.2 路面附着系数预测模型和EPS系统控制策略
本文采用支持向量机算法预测路面附着系数,将车速和转向盘转矩作为输入变量进行路面附着系数的预测。每间隔一定的时间进行一次路面附着系数的预测工作,在进行路面附着系数预测时不进行助力工作。
将CARSIM中车辆的转向方式设置为机械转向,通过转向盘转角斜坡输入试验仿真获取在不同车速和不同路面附着系数下的转向盘力矩的最大值,将获取到的结果划分为训练集和测试集,分别如表2和表3所示。
表2 预测模型训练集
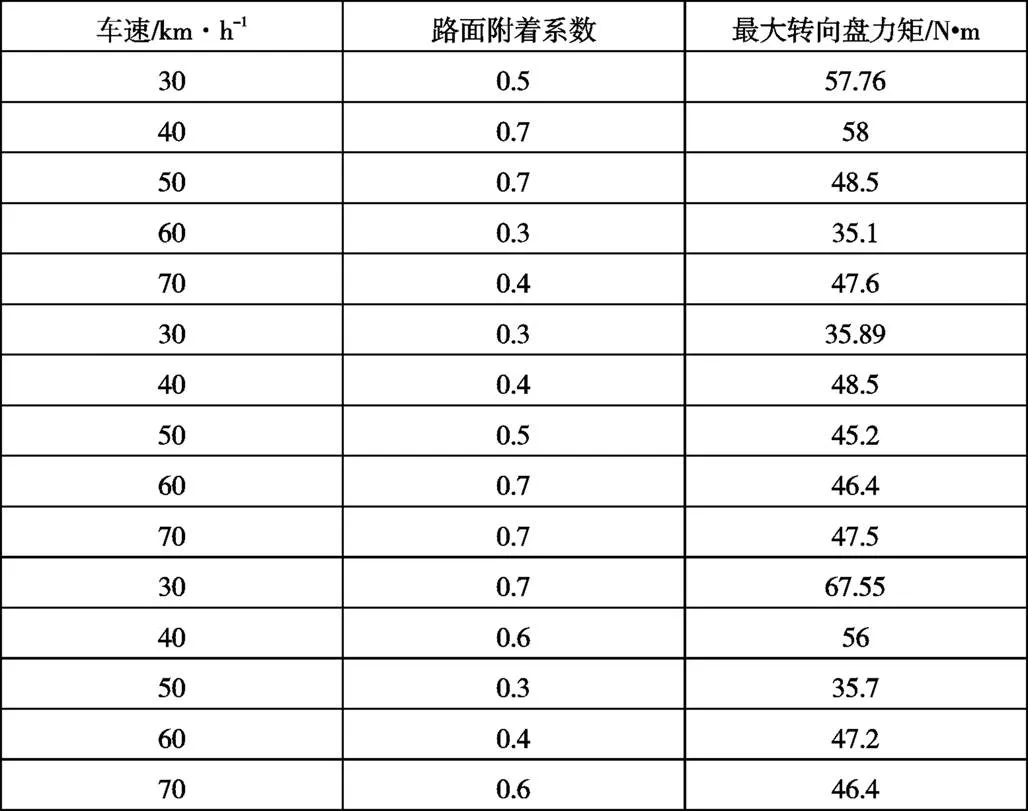
表3 预测模型测试集
为了验证路面附着系数预测模型的鲁棒性,本文所选用的训练集数据主要选取速度在30km/h-70km/h之间,路面附着系数在0.3-0.7之间,共15组数据;测试集数据中,速度分布在10km/h-30km/h之间,附着系数分布在0.3以下和0.7以上。同时还与常规的拟合模型进行了对比,拟合时采用3次多项式拟合,拟合的结果如式(12)所示:
这里说的资源主要是指学校的硬件设施、教学设备,要充分发挥设施设备的育人功能,物资管理的基本要求是有用、有序。有用就是从教学、学生的角度出发,用了效果会好一些、不用效果就会受影响,所以就要大胆用、多用,但不要搞成为了用而用的形式主义;有序就是要做好使用调度,让每位教师、每个班级有计划、有组织、有秩序地使用教学设备,避免出现没人使用时长期闲置、有人使用时分不过来的现象。
(12)
其中,p00=-183.1,p10=3.632,p01=1022,p20=-0.05577,p11=-6.005,p02=-1535,p30=0.0003375,p21=0.03665,p12=0.8342,p03=904.8。
采用支持向量机建立的预测模型经过测试集验证后的结果如表4所示。
表4 支持向量机预测模型测试结果
对于多项式拟合而言,其测试结果如表5所示。
表5 多项式拟合测试结果
通过表4和表5可以看出,对基于支持向量机的路面附着系数预测模型而言,其平均相对误差为0.036,而多项式拟合模型的平均相对误差为0.798。通过对比得出,多项式拟合模型在附着系数较低或者较高时的预测精度不能满足要求,而基于支持向量机的路面附着系数预测模型对于整个范围的附着系数的预测精度都能达到需要的精度要求。
计算机上的专业宿舍管理系统能够有效整理和记录宿舍相关信息,大大减少人力物力,提高了信息的及时保存效率和安全性,更方便数据的查询。因而近几年来,校园里涌现出各类的信息管理系统,逐步应用到校园各类管理中[1]。为了紧跟学校的实际需求,开发出一款良好的且能投入实际使用的高校宿舍管理系统是十分有用的。它将推动学校信息化和科学化管理,特别是在交通不便、民族较多的高校显得更为重要。
本文提出的电动助力转向系统控制策略结合了车速、方向盘转矩及路面附着系数三个因素,同样通过基于支持向量机的预测模型的方式获得助力电机的参考助力电流Iref,然后通过PID控制实现对电机实际电流Iact的控制。
3 联合仿真验证
3.1 转向轻便性试验
转向轻便性试验仿真采用双纽线试验,主要目的是测试车辆转向盘操纵力矩的大小,本文进行了全路面附着系数EPS控制策略、传统EPS控制策略以及无EPS系统时的双纽线试验,通过对比来验证所提出的全路面附着系数EPS控制策略在轻便性方面的效果。根据GB/T 6323 -2014中的转向轻便性试验规定,设定仿真车辆车速为10km/h,保持车速不变,保证行驶路程大于一个周期[10],试验的路径如图6所示。
仿真得到的转向盘转矩-转角曲线如图7所示,不同条件下的转向盘最大力矩和对应的转向盘转角如表6所示。
图6 双纽线试验路径
图7 双纽线试验转向盘转矩-转角曲线
图7中蓝色曲线代表无EPS系统的条件,红色曲线代表不考虑附着系数的传统EPS系统的条件,绿色曲线代表全路面附着系数EPS系统的条件。
综上所述,边坡开挖成型效果如下:右坝肩EL384~EL351、0-26.96~0+117.82开挖梯段共分10个单元,其中9个岩石边坡开挖,1个岩石地基开挖。通过严格把控过程质量控制,取得了理想的边坡成型效果,坡面半孔率达到92.84%,10个单元工程一次验收合格率100%,优良率100%。
收集广东省惠州市第一人民医院、惠州市中心人民医院、惠州市第三人民医院于2013年1月1日—2016年12月31日的面神经炎住院患者合计882例作为研究对象。其中,惠州市第一人民医院294例、惠州市中心人民医院306例、惠州市第三人民医院282例,诊断标准依照中国特发性面神经炎诊治指南[1]。
表6 双纽线试验结果
由图7和表6可以看出,装备EPS系统后,转向盘力矩大幅降低,转向轻便性得到很大提高;同时,采用全路面附着系数EPS控制策略后,转向盘力矩稍有上升,表明EPS控制策略考虑路面附着系数后,对轻便性有一定的影响,轻便性略微下降,但与没有装备EPS的车辆相比,轻便性还是有很大的改善。
3.2 操纵稳定性试验
本文采用转向盘转角阶跃输入试验作为操稳性开环试验,来验证所提出的全路面附着系数EPS控制策略在操纵稳定性方面的效果。通过转向盘转角阶跃试验将全路面附着系数EPS控制策略、传统EPS控制策略以及无EPS系统进行了对比验证。设定系统的仿真时间为5s,当仿真运行到0.5s时,开始转动转向盘,并在1s的时间内转动至180度。设置路面附着系数为0.5后,仿真得到转向盘力矩随时间的变化曲线如图8所示。
由图8转向盘力矩曲线可知,在转向盘转角阶跃输入下,有EPS系统助力时,转向盘力矩的峰值和稳态值都大幅减小,说明助力效果明显。同时,采用全路面附着系数EPS控制策略后,转向盘力矩有所增大,说明驾驶员在较低路面附着系数下的路感得到增强。
图8 转向盘力矩随时间的变化曲线
如图9和图10所示分别为角阶跃试验中车辆的侧向加速度和横摆角速度随时间的变化曲线。通过对比侧向加速度和橫摆角速度的峰值、稳态值及橫摆角速度的响应时间,可以得到表7。
图9 侧向加速度随时间的变化曲线
图10 横摆角速度随时间的变化曲线
通过图9、图10和表7可以得到,引入传统EPS控制策略后,车辆侧向加速度和横摆角速度都有略微增加的趋势,操纵稳定性略有下降,但轻便性得到改善。采用全路面附着系数EPS控制策略后,侧向加速度以及横摆角速度均有所减小,改善了车辆的操纵稳定性,提高了车辆的行驶安全。
表7 操稳性仿真结果
4 结论
本文将路面附着系数加入EPS控制策略的考虑因素中,首先分析并建立了基于整车动力学的电动助力转向系统模型,基于支持向量机算法建立了全路面附着系数的预测模型,通过Carsim仿真获得训练集和测试集,在此基础上提出了考虑全路面附着系数的EPS系统控制策略,并进行了Carsim和Simulink的联合仿真试验来验证提出的控制策略。仿真结果表明:本文提出的考虑全路面附着系数的EPS控制策略能够满足车辆的转向轻便性,同时明显改善车辆的操纵稳定性,且使驾驶员在低附着系数路面下的路感更清晰,从而提高车辆的行驶安全性。
参考文献
[1] 周兵,徐蒙,范璐.低附着路面电动助力转向控制策略[J].湖南大学学报(自然科学版), 2015, 42(2):29-34.
[2] 赵林峰,陈无畏,秦炜华,等.低附着路面条件的EPS控制策略[J].机械工程学报, 2011, 47(2):109-114.
[3] 范璐,周兵.低附着路面电动助力转向系统助力控制研究[J].汽车工程,2014,36(7):862-866+878.
[4] 周兵,徐蒙,范璐.低附着路面电动助力转向控制策略[J].湖南大学学报(自然科学版), 2015, 42(2): 29-34.
[5] 张玉洁.基于Carsim的电动助力转向系统仿真与硬件在环验证[D].合肥:合肥工业大学,2015.
[6] 蒋照华.EPS系统补偿控制的仿真和验证[D].合肥:合肥工业大学, 2015.
[7] 陈无畏,刘翔宇,黄鹤,等.车辆转向工况下的路面附着系数估计算法[J].汽车工程,2011,33(6):521-526.
[8] 余卓平,曾德全,熊璐,等.基于激光雷达的无人车路面附着系数估计[J].华中科技大学学报(自然科学版),2019,47(7):124-127.
[9] 于滨,杨忠振,林剑艺.应用支持向量机预测公交车运行时间[J].系统工程理论与实践,2007,27(4):160-164.
[10] GB/T 6323-2014,汽车操纵稳定性试验方法[S].北京:中国标准出版社,2014.
Research on EPS system control strategy of full road adhesion coefficient
He Jie
(School of Automobile, Chang’an University, Shaanxi Xi’an 710064 )
Abstract:The traditional EPS system can meet the steering requirement on the general road. However, for the road with low adhesion coefficient or complex adhesion coefficient change, the traditional EPS control strategy is difficult to meet the steering demand. Therefore, based on the estimation of road adhesion coefficient, an electric power steering control strategy considering the full road adhesion coefficient is proposed. The EPS system control model is built in Carsim and Simulink for co-simulation. The simulation results show that the EPS control strategy considering the full road adhesion coefficient can significantly improve the handling stability of vehicle and enhance the driving safety.
Keywords: EPS system;Road adhesion coefficient;Control strategy;Co-simulation
Document Code: A
Article ID: 1671-7988(2020)24-73-05
中图分类号:U463.4
文献标识码:A
文章编号:1671-7988(2020)24-73-05
作者简介:何杰,长安大学汽车学院车辆工程专业硕士研究生,研究方向为车辆控制技术。
10.16638/j.cnki.1671-7988.2020.24.025
CLC NO.: U463.4
