基于分布式电动汽车的行驶状态估计算法综述
2021-01-05刘鑫烨查云飞马芳武郑寻于淼侯乃仁权晓玉吴昊
刘鑫烨 查云飞 马芳武,2 郑寻 于淼 侯乃仁 权晓玉 吴昊
(1.福建工程学院,福州 350118; 2.吉林大学 汽车工程学院,长春 130012)
主题词:分布式 电动汽车 状态估计 主动安全
1 前言
由于汽车工业的快速发展,汽车更加智能化,许多厂商已经在车上加入主动安全控制系统。但由于道路环境复杂多变,通过对比分析传感器收集的各类信息,来预估下一时刻的车辆的状态,使中央处理器根据这些信息做出相对应的决策,来提高车辆的主动安全性能以及行驶稳定性[1],那么针对汽车行驶状态估计算法的研究就显得尤为重要。当前自动驾驶多以电动汽车为主要载体来实现自动驾驶功能。本文对国内外学者关于电动汽车的行驶状态估计算法的研究进行分类及汇总,并探讨未来汽车行驶状态参数估计的发展趋势与方向。
2 行驶状态估计的主要方法分类及原理概述
在车辆行驶状态估计中,对于状态估计算法主要有:卡尔曼滤波(Kalman Filter,KF),扩展卡尔曼滤波(Extended Kalman Filter,EKF),无 迹 卡 尔 曼 滤 波(Unscented Kalman Filter,UKF)和联邦卡尔曼滤波算法(Federal Kalman Filter,FKF),以及一些新的滤波算法,如信息融合滤波,强跟踪滤波等算法。
2.1 卡尔曼滤波算法
卡尔曼滤波(Kalman Filter)是一种适用于线性系统状态方程的滤波算法,其中滤波过程主要包含:通过收集系统输入和输出的观测数据,进而得出最优估计[2-9]。同时,由于外部对系统往往具有噪声干扰作用,因此获得最优估计的过程也被称作滤波过程。卡尔曼滤波算法是在量测及状态方程已知的前提下,对所采集的一系列测量噪声进行滤波,并得出结果。
它的优点在于,容易通过计算机编译得到代码,对实时采集的数据进行快速的更新和处理,实现相关估计功能。汽车工业中,卡尔曼滤波凭借自身简单易于操作的优势,被广泛运用,在车辆领域得到较好的普及。准确估计车辆状态参数,对汽车主动安全性控制系统具有重大意义。所应用的方法属于统计学中的估计理论。并且,卡尔曼滤波技术本质上为信息融合技术,属于信息领域的前沿技术,其理论和方法也被广泛运用。因此,卡尔曼滤波算法由于其估计结果准确、估计过程快速及信息多样性的优势,而备受青睐[2-3]。
2.2 扩展卡尔曼滤波算法
由于KF是基于线性随机差分方程的滤波算法,因此它仅适用于线性控制系统的状态信息估计。为了有效地分析非线性系统模型,一些专家开始提出扩展卡尔曼滤波器(Extended Kalman Filter,EKF)。扩展卡尔曼滤波器的工作原理与卡尔曼滤波器的工作原理基本相同,即基于线性最小方差估计理论,通过递归算法从与提取信号有关的测量中估计所需信号[10-17]。在整个工作过程中,EKF算法主要使用系统的4种信息:状态方程,量测方程,白噪声激励和量测误差的统计特性。与KF的不同之处在于,EKF算法在系统最佳估计点附近,对非线性函数的一阶或二阶泰勒展开,舍弃了高阶分量,并简单地线性化了非线性模型。
2.3 无迹卡尔曼滤波算法
卡尔曼滤波和扩展卡尔曼滤波的工作过程都是将被测系统的非线性数学模型线性化,转化为线性高斯模型,并直接在高斯模型中求得贝叶斯递推公式的解析解。但对于模型的非线性问题,EKF除了计算量大,还存在非线性误差影响估计精度的情况。针对EKF的缺点,有学者引入UKF的概念[18-31],对于非线性模型,直接解析贝叶斯递推公式会比较困难,其难点主要是难以分析和获得每种概率分布的均值和方差。但是,不敏变换可以更好地解决此问题。通过定期采样和加权,可以得到近似均值和方差。不敏变换可以通过一定规律的权重以及采样,近似求得均值和方差。同时,不敏变换所获得的结果近似精度较高,因此UKF的估计精度能达到EKF的二阶效果。
2.4 联邦卡尔曼滤波算法
联邦卡尔曼滤波器是一种2 层信息融合的结构,运用信息分配的原理,将整个系统中的各个部分动态信息分别分配给每个子滤波器,经子滤波器处理后再传给主滤波器进行融合,实现信息的最优融合估计[32-37],从而实现对车辆行驶状态实时准确估计。该解决了车辆行驶过程单一采用卡尔曼滤波算法,但存在容错性差、稳定性差等问题。
3 国内外学者对于行驶状态估计的研究
3.1 卡尔曼滤波算法
Wenzel[38]等利用双卡尔曼滤波器并行工作的方法来估计车辆的状态和参数。康桂彬[39]对四轮前驱轿车行驶状态的研究表明,提高车辆稳定性、安全性以及经济性可以从车辆行驶状态估计入手,且更有利于这几方面的性能的提升。他们将现有量产车车载传感器所能测得的信号,通过卡尔曼滤波技术准确得到当前的状态信号。同时,搭建Adams/MATLAB 的软件实时仿真,其逻辑框图,如图1所示。通过卡尔曼估计算法对本身控制及车辆结构的相关参数进行估计,从而得到整车行驶状态估计结果。

图1 Adams/MATLAB联合仿真中卡尔曼滤波估计逻辑框图[39]
Te Chen 和Yingfeng Cai[40]等人为了提高估计精度和车辆运行状态估计的适应性,提出并推导了电动轮模型的概念,并考虑到它是一个输入未知的非线性模型。因此,采用高阶滑模的设计思想得出了电动轮模型纵向力的状态空间方程。为了提高估计结果的准确性和车辆状态估计的可靠性以及信息融合与轮胎综合估计策略,设计了一种带自适应加权平方根容积卡尔曼滤波器的力补偿方法,建立了测量噪声的协方差矩阵,用于观测器设计。最后,进行了CarSim/Simulink 联合仿真模型和实验,验证了设计的有效性及估计策略。
由于汽车行驶时所遇到的输入噪声复杂多变,而且往往不是线性输入,卡尔曼滤波算法在多噪声非线性输入的情况下,容易把最优估计给过滤掉。因此,目前对于单纯利用卡尔曼滤波算法在行驶状态估计的研究逐渐减小,转而将卡尔曼滤波算法进一步升级。
3.2 扩展卡尔曼滤波算法
孙秋云[41]采用较为简单的3 自由度车辆动力学模型,并用量产车上的较易测量的方向盘转角、车辆横、纵向加速度作为扩展卡尔曼滤波的输入值,采用扩展卡尔曼滤波算法对汽车的相关动力学参数(横摆角速度、质心侧偏角以及纵向车速)进行滤波估计。从仿真结果与试车场地试验数据比较可以发现,估计结果较为理想,仿真与试验结果具有一致性。李刚[42]采用自适应扩展卡尔曼滤波算法,对车辆行驶状态参数进行估计。该方法采用Dugoff 模型,建立了非线性3自由度车辆估算模型,通过对低成本传感器信号(纵、侧向加速度、横摆角速度以及方向盘转角)的融合,实现对车辆行驶状态的高精度估计,同时在CarSim 和MATLAB 联合仿真中对其有效性进行验证。试验结果表明,基于自适应扩展卡尔曼滤波的估计算法能够比传统的扩展卡尔曼滤波能够更加稳定、准确的估计车辆的行驶状态。Gopinath G.R.[43]发现EKF 观测器的性能是通过简单的自适应调整进行改进的,从而速度估计中的快速动态响应在稳定状态下提供更好的噪声抑制驱动器的操作。谭光兴等人[44],采用扩展卡尔曼滤波技术,在车辆3 自由度动力学模型的基础之上,在低纵向车速区间内,对横摆角速度、质心侧偏角以及纵向车速进行估计,能够发现在低速度区间内,由于外部干扰噪声较小,因此估计准确性高。
由于扩展卡尔曼滤波技术只是对非线性方程进行简单的一阶泰勒线性化处理,导致估计精度不高,并且雅克比矩阵求解复杂,会导致估计成本上升。
3.3 无迹卡尔曼滤波算法
宋传学、肖峰[45]等人应用非线性性能更优秀的无迹卡尔曼滤波算法,设计了车辆状态观测器,其估计过程如图2所示。仿真结果表明,其设计的无迹卡尔曼滤波估计器对于车辆在非线性区间内的估计对象有较高估计精度。并且,车辆状态参数估计中,轮胎力计算精度也是评价估计精度的重要因素。在侧向动力学相关参数的估计中,引入了考虑动态特性的修正Dugoff 轮胎模型,并能够对运动状态下的轮胎侧向力进行有效估计。
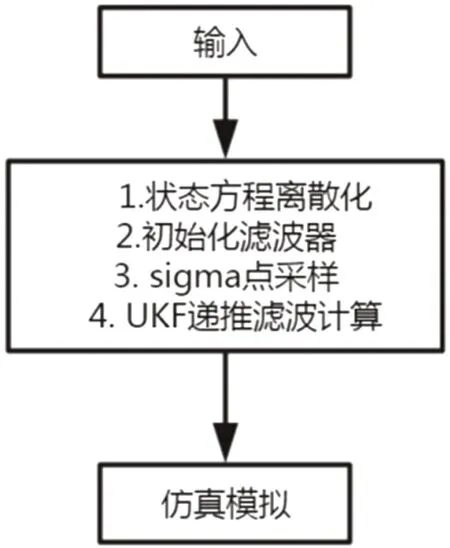
图2 无迹卡尔曼滤波器估计流程
郝亮、郭立新[46]利用无迹卡尔曼滤波算法,对车辆状态参数进行软测量。同时,该算法考虑到在电动汽车非静态运动时,外界对车辆的非线性噪声影响,因此采用具有非线性效果的高速公路动态轮胎模型来对轮胎侧向力进行滤波估计。最后,再利用CarSim和MATLAB联合仿真分析,验证了该方法对于行驶状态估计的准确性。同时利用该技术可以通过一些低成本的传感器进行整车行驶状态估计,实时性大大提高。吉林大学石艳茹等人[47],通过UKF 对质心侧偏角、横摆角速度以及纵向车速的估计,运用在电子助力转向系统(Electronic Power Steering,EPS),开展了对某一量产车型稳定性控制系统的关键参数研究,仿真结果表明所开发的汽车速度算法不但能确保实时性和稳定性,并且鲁棒性也较高(如图2)。丁红[48]等人,将无迹卡尔曼滤波算法运用到质心侧偏角的估计中去,并采用两厢车型的参数在动力学仿真软件对观测器进行实时验证,仿真结果表明无迹卡尔曼滤波算法的非线性估计精度高。
无迹卡尔曼滤波本质上是通过线性插值的方法,完成对非线性模型的高精度变换。在非线性效果不强的情况下,该算法确实能够削弱非线性噪声对系统的影响,但当非线性效果明显时,系统中的协方差矩阵更新容易出现负定矩阵的情况,使得估计结果不稳定。
3.4 联邦卡尔曼滤波算法
Guangxing Tan、Huijun Gao[49]针对汽车线控转向系统基于联邦卡尔曼滤波的车辆状态估计算法,设计并提出了改进处理方法。首先,建立非线性的7自由度的汽车模型和Dugoff 轮胎模型,并建立多传感器模型网络,同时得出该算法的方程。其次,根据系统时变和非线性特性,加速积分,车轮扭矩和车轮速度校正,分别建立滤波器,在入弯状况下,在主滤波器中引入方向盘转角,以得到入弯状况下的最优状态估计。最后,在模拟的试验平台中建立关于转向盘转角正弦输入和双车道变更的转弯实验模型,试验结果表明所提出的联邦卡尔曼滤波算法能够对状态和参数进行有效的估计。
此方法得出的结果相较于单个滤波器结果精度上升,但结构繁琐。
3.5 信息融合滤波,强跟踪滤波算法
3.5.1 信息融合滤波算法
陈龙等人[50]提出了将电驱动模型应用在纵向力的估计,提出一种结合信息融合滤波(Information Fusion Filter,IFF)算法的车辆状态级联估计方法,该算法基于3自由度动力学模型以及传统的轮胎模型,且能够实现对轮胎纵向力的准确估计,其中利用了纵向力观测器(Longitudinal Force Observer,LFO)的输出值作为估计算法的输入。研究结果表明:设计的纵向力观测器具有较高的纵向力估计精度,并且所提出的估计方法能够实时跟踪车辆状态,且估计性能优于扩展卡尔曼滤波。该方法能降低状态估计成本,为车辆行驶估计提供新思路。
3.5.2 强跟踪滤波算法
陈特[51]等人提出了一种补偿估计算法,该算法适用于传感器获取信息不足的情况,将纵向力估计作为测量值。该算法的道路仿真实验结果表明,所得出的纵向力观测器对于外界未知的干扰及输入,系统依然能够实时估计纵向力。因此,改用强跟踪的方法(Strong Tracking Filter,STF)对估计精度的提升有很大的帮助,STF 相比EKF 对纵向车速、侧向车速以及横摆角速度的估计精度分别提高了14.03%、15.02%和16.58%。在此方法中,作者将轮内电机模型与Dugoff轮胎动力学方程相结合,在所提出的补偿算法应用在车辆状态参数估计中。该方法在电动汽车上应用优势强,且估计成本低,能够为未来基于电动汽车的车辆状态估计提供新的估计方法。
基于CarSim_Simulink 联合仿真平台对所提出的算法进行了仿真分析,同时进行了底盘测功机台架试验和实车道路试验,结果表明,文中提出的估计方法能够实时估计车辆行驶状态,具有较高的估计精度。
4 总结与展望
国内外电动汽车发展迅速,推动了汽车自动驾驶时行驶状态估计的相关研究,以提高自动驾驶的安全性、稳定性,进而保障乘员的安全。通过对多种估计算法进行分类及阐述,对卡尔曼滤波算法(卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波和联邦卡尔曼滤波算法)的工作原理以及当今国内外研究现状以及一些国内学者在状态估计中提出的新思路、新方法在实际中的应用进行综述。
分析、列举出了各类算法在汽车行驶状态估计过程中的精度,以及涉及到的一些场景。总结的结论是目前基于卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波和联邦卡尔曼滤波的多信息源融合的行驶状态估计依然是当今世界状态估计研究的主要算法,最后分析出以上各算法的优缺点,如表1所示。
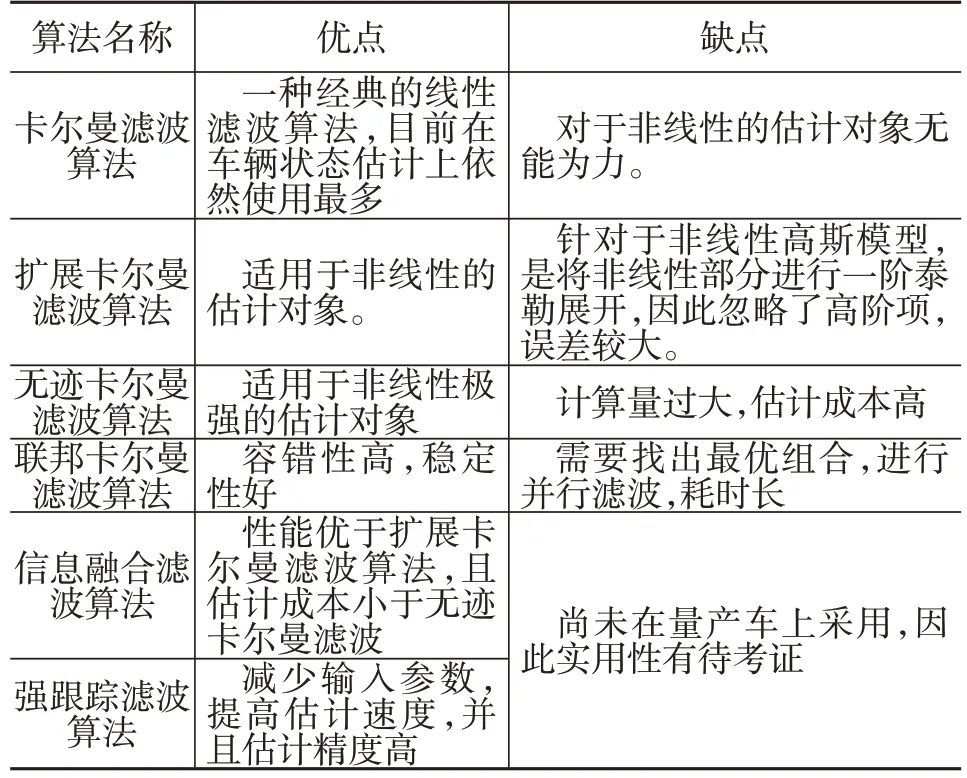
表1 滤波算法优缺点对比