智能汽车高速换道避障安全车距仿真分析*
2021-01-04彭涛刘兴亮方锐苏丽俐王涛赵若愚
彭涛 刘兴亮 方锐 苏丽俐 王涛 赵若愚
(1.天津大学电气自动化与信息工程学院;2.中国汽车技术研究中心有限公司;3.天津职业技术师范大学汽车与交通学院)

当前,随着汽车保有量的快速增长,交通事故频发,严重制约经济发展和社会和谐。在各类交通事故原因中,人是最主要的因素[1-2]。智能汽车高速换道轨迹规划,是保证车辆安全、舒适、高效行驶的关键所在。国内外在换道模型和安全车距计算方法方面开展了广泛研究,但不管是基于传统路径规划方法[3-4],还是AI(人工智能)算法[5],都难以从人机—车—道路的角度对其开展较全面的定性和定量化分析。因此,文章基于车辆高速换道运动特性和路径影响因素分析,提出综合考虑人机—车—环境因素的智能汽车换道轨迹和安全车距建模方法,解决了多因素影响下的智能汽车高速换道安全车距定量计算问题,经过验证,达到预想的效果。
1 智能汽车高速换道场景建模仿真
1.1 车辆高速换道运动特性
分别定义地面坐标系和车辆坐标系,汽车换道平面运动,如图1 所示。
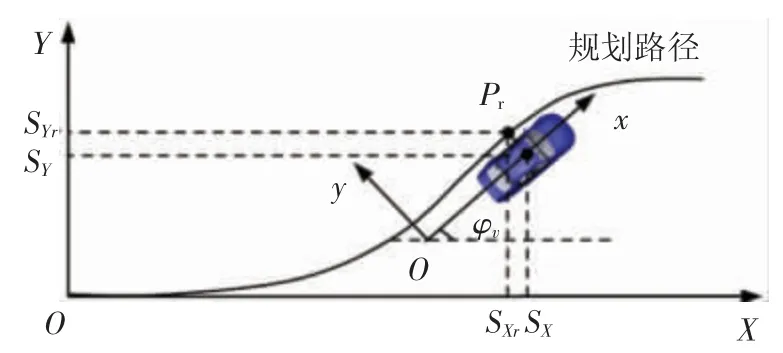
图1 汽车换道平面运动示意图
图 1 中:XOY 为地面坐标系,xoy 为车辆坐标系,SX和SY分别为汽车在XOY 下的横向和纵向位置坐标,Pr为汽车在XOY 下规划路径的参考点,SXr和SYr分别为参考点Pr的横向和纵向位置坐标,φv为汽车运动横摆角。在整车坐标系XOY 下,汽车完成高速换道时,理想的侧向位移是道路的宽度(一般为3.75 m)。不同的转向输入(如频率和转角)条件下,汽车完成换道的时间不同。
1.2 智能汽车高速换道建模
文章基于汽车自动驾驶仿真软件PreScan 搭建智能驾驶仿真平台,构建智能汽车高速换道场景仿真模型,对车辆动力学特性和智能驾驶路径规划等方面开展仿真分析。
仿真场景为某国内开发的智能汽车高速换道场景,高速道路为双向双车道平直路面,车道的宽度为3.75 m,本车(智能汽车)初始所在车道为慢车道,前方有低速行驶车辆,左侧快车道前、后方均有车辆行驶。本车通过前/后毫米波雷达检测周围车辆的相对速度和距离,构建的智能汽车高速换道场景和车辆动力学模型,如图2 所示。

图2 基于PreScan 的智能汽车高速换道场景和动力学模型构建
1.3 智能汽车高速换道仿真
设置路面附着系数为0.85,当车速为120 km/h(约33.33 m/s)、转向频率分别为 0.3,0.4,0.5 Hz 时,汽车高速换道轨迹和运动状态变化,如图3 所示。

图3 汽车高速换道轨迹和运动变化情况
从图3 可以看出:在一定车速、不同转向频率输入的条件下,汽车侧向位移约为3.75 m(等于车道宽度),表明汽车完成侧向换道;在换道过程中,考虑到汽车转向引起的纵向行驶阻力的变化,纵向速度存在一定的波动性,且转向频率越大,波动性越强,但总体误差控制在1%以内;随着转向频率的增大,汽车的侧向速度峰值增大,且达到峰值对应的时间点分别为1.73,1.3,1.08 s,响应时间随之减小;横摆角的变化趋势与侧向速度一致,达到峰值对应的时间点分别为1.68,1.28,1 s,与侧向速度的时间延迟在 0.1 s 内;侧向加速度和横摆角速度呈近似正弦波变化趋势,侧向加速度峰值分别达到0.22g,0.38g,0.56g,横摆角速度峰值分别达到 11.22,6.83,3.82(°)/s,随转向频率增加呈明显的增大趋势。因此,当汽车高速换道时,可近似认为纵向速度恒定,侧向速度和横摆角呈现较为一致的单峰变化趋势,并且峰值及梯度随转向频率的增大而增大,梯度所体现的汽车侧向加速度和横摆角速度峰值,会对驾乘舒适性产生较大影响,梯度值越大,舒适性越差,当转向频率达到0.5 Hz 时,侧向加速度峰值超过0.5g(附着状态良好的路面上一般不大于0.4g),难以保证驾乘舒适性。
2 汽车高速换道避障安全车距计算
智能汽车为躲避前方低速障碍车,采用换至临近车道的方式进行避撞,可有效降低换道安全车距,提高通行效率。智能汽车要实现安全合理地换道避障,首先,在安全性方面,要保证正确、及时并准确地决策和执行,一方面确保与原车道前方车辆安全避撞,另一方面还要防止与目标车道前、后方车辆发生碰撞,此外,换道后要保证汽车及时回正,最终位于目标车道中心线上并继续直线行驶。其次,考虑到驾乘人员的舒适性,确保换道在较小的侧向运动变化下进行。以上条件与智能系统、车辆、道路及周围环境条件密切相关。
为避免智能汽车与前车和换道目标车道内的汽车发生碰撞,汽车换道安全避撞的临界位置关系,如图4所示。

图4 汽车换道安全避障的临界位置关系
图4 所示的状态为智能汽车与前方汽车安全换道避障的临界状态,此时汽车换道时间为tc,对应的本车换道侧向位移为Y(tc),横摆角为φ(tc),为保证换道避撞的安全性,本车与周围汽车的运动状态应满足:

其中,φ(tc)可表达为:

式中:B
0——本车宽度,m;
B1——原车道前方障碍车宽度,m;
a——本车的前悬长度,m;
b——本车的轴距,m;
b'——本车的后悬长度,m;
X(tc)——tc时间内本车的纵向位移,m;
X1(tc)——tc时间内原车道内障碍车的纵向位移,m;
X2(tc)——tc时间内目标车道前方汽车的纵向位移,m;
X3(tc)——tc时间内目标车道后方汽车的纵向位移,m;
ΔL1——本车换道开始时刻与本车道前方障碍车的纵向间距,m;
ΔL2——本车换道开始时刻与目标车道前方汽车的纵向间距,m;
ΔL3——本车换道开始时刻与目标车道后方汽车的纵向间距,m;
ls——保守安全车距,m;
VX3(tc)——tc时刻目标车道前方汽车的纵向速度,m/s;
VX2(tc)——tc时刻目标车道后方汽车的纵向速度,m/s;
VX(tc)——tc时刻本车纵向速度,m/s;
VY(tc)——tc时刻本车侧向速度,m/s;
Δt——积分微小时间段,s。
在本车换道过程中,应保证汽车侧向位移不超出目标车道,并且为保证舒适性,换道过程中的侧向加速度在舒适性要求的范围内,可表达为:

式中:B——车道宽度,m;
Y(t)——t 时间内本车的侧向位移,m;
aY(t)——t 时刻本车的侧向加速度,m/s2;
aYc——舒适性侧向加速度限值,m/s2;
aYmax——地面附着力允许的最大加速度,m/s2。
其中,aYc可根据实际的驾乘感受进行设置,在附着状态良好的路面上一般不大于0.4g,并且该值不能大于aYmax,具体取值需根据路面附着系数确定。
根据以上约束条件,智能汽车换道避撞原车道前方障碍车的最小安全车距ΔL1min、目标车道后车最小安全车距ΔL2min以及目标车道前车最小安全车距ΔL3min可分别表达为:

根据以上分析可知,智能汽车高速换道安全车距与换道轨迹有直接关系,而换道轨迹与人机、汽车及道路等因素密切相关。因此,智能汽车决策系统的反应时间、汽车的静/动态参数和道路附着系数以及周围汽车运动状态等都会对汽车高速换道运动特性和避障安全车距产生影响。
3 换道避障安全车距影响因素分析
为了获得换道避障安全车距,首先要对智能汽车换道轨迹进行分析。将智能汽车换道完成时间和纵向位移、侧向加速度峰值作为评价指标,并且定义汽车换道完成状态为智能驾驶系统开始换道决策至汽车到达目标车道(侧向位移第1 次达到车道宽度)。通过改变智能驾驶系统的反应时间、汽车结构和运动参数、道路附着系数等,分析人机、汽车和道路等因素对高速换道的影响。
3.1 智能驾驶系统反应时间的影响
智能驾驶系统的工作过程包括环境感知、决策规划和执行控制,反应时间是该系统接收环境感知信息后进行行为决策、路径规划并开始执行的时间,包含整个决策规划的时间历程。传统汽车高速换道轨迹取决于驾驶员的反应时间,同样,智能驾驶系统的反应时间与智能汽车高速换道轨迹密切相关,进而影响避障安全车距。
设置道路为平直路面,车道宽度为3.75 m,路面附着系数为0.85,汽车的行驶速度为120 km/h(约33.33 m/s)、转向频率为0.4 Hz,当系统反应时间分别为0.25,0.50,0.75 s 时,汽车的换道轨迹和侧向速度,如图5 所示。

图5 不同反应时间对换道轨迹和侧向运动的影响
从图5 可以看出,由于智能反应时间决定了汽车高速换道转向的执行时间,从而影响汽车的行驶轨迹,在不同反应时间的情况下,换道完成时间会相应地延迟0.25 s,在纵向速度为33.33 m/s 时,对应的换道完成纵向位移也相应地增加8.33 m,此时侧向速度会相应延迟,但是侧向加速度的峰值不变。因此,在汽车换道避撞过程中,随着反应时间的增加,汽车换道行驶轨迹和侧向速度延迟时间会相应地增加,这必然会增大避障安全车距。为提高避障安全性,有必要尽可能减小反应时间,加快系统决策规划的速度。
3.2 智能汽车参数的影响
3.2.1 横摆转动惯量的影响
设置道路为平直路面,车道宽度为3.75 m,路面附着系数为 0.85,车速为 120 km/h(约 33.33 m/s)、转向频率为0.4 Hz,当汽车的横摆转动惯量(I)z分别为1 000,2 000,3 000 kg·m2时,汽车的换道轨迹和侧向速度,如图6 所示。


图6 不同横摆转动惯量对换道轨迹和侧向运动的影响
从图6 可以看出,当汽车横摆转动惯量增大时,汽车的换道完成时间和纵向位移随之增大,分别为2.47,2.51,2.67 s 和 82.01,83.34,88.68 m,换道完成效率降低,纵向距离增加;侧向加速度峰值分别为0.376g,0.376g,0.371g, 对 应 的 峰 值 时 间 分 别 为0.66,0.69,0.71 s,峰值变化较小,响应时间随之增大。因此,横摆转动惯量的增加会增大汽车转向运动的响应时间,在相同条件下,同样会增加避障安全车距。
3.2.2 车速的影响
根据汽车换道安全车距计算公式,车速是影响换道安全车距的重要因素。设置道路为平直路面,车道宽度为3.75 m,路面附着系数为0.85,转向频率为0.4 Hz,当汽车的行驶速度(v)分别为 100,110,120 km/h 时,汽车的换道轨迹和侧向速度,如图7 所示。

图7 不同车速对换道轨迹和侧向运动的影响
从图7 可以看出,随着车速的增加,汽车的换道完成时间和纵向位移随之增大,分别为2.95,2.71,2.51 s和81.63,82.49,83.34 m,虽然提高了换道完成效率,但是纵向距离增加,在换道过程中汽车侧向加速度响应基本一致,最大值均为0.376g。因此,汽车的行驶速度对运动路径有直接的影响,随着速度的增大,安全车距增大,而车速对侧向加速度响应无直接影响。
3.3 路面附着系数的影响
路面附着系数影响轮胎的地面附着力,与汽车的纵向滑移力和侧偏力密切相关,因此,路面附着条件影响汽车的制动和转向动态响应,而路面附着系数的改变必然导致汽车高速换道轨迹和运动响应的改变。通过改变路面附着系数,分析路面附着条件对换道完成时间的影响。
设置道路为平直路面,车道宽度为3.75 m,汽车的行驶速度为120 km/h(约33.33 m/s)、转向频率为0.4 Hz,智能系统反应时间为0.25 s,当路面附着系数(μ)分别为0.35,0.60,0.85 时,汽车的换道轨迹和侧向速度,如图8 所示。

图8 不同路面附着系数对换道轨迹和侧向运动的影响
从图8 可以看出,随着路面附着条件的改善和附着系数的增加,汽车的换道完成时间和纵向位移分别为 2.95,2.72,2.51 s 和 98.01,92.34,83.34 m,换道效率明显提高;侧向加速度峰值分别为0.331g,0.371g,0.376g,对应的峰值时间分别为 0.77,0.72,0.69 s,峰值增大并且响应更快;同时,当附着系数减小至一定值后,侧向加速度随之大幅下降,说明此时轮胎侧向附着力已经达到饱和。因此,附着不良的路面会一定程度上增大汽车转向运动的响应时间,降低换道效率,在相同条件下,同样会增加避障安全车距。
根据以上分析,换道轨迹对避障安全具有较高的时效性,换道轨迹所体现出的换道完成效率,与汽车横摆响应的快慢密切相关,受系统决策规划反应时间、汽车特性参数和道路附着条件的影响。
利用Prescan 搭建的高速换道避障场景,在道路附着条件良好路面上(μ=0.85),提取智能汽车和周围汽车基础参数,如表1 所示。

表1 智能汽车和道路环境基础参数
基于以上设置,根据式(1)~式(4),计算不同的系统反应时间、汽车参数及路面附着系数条件下的智能汽车高速避障安全车距,如表2 所示。
由表2 可见:智能驾驶系统的反应时间对换道避障安全距离影响较大,当反应时间增长100%时,本车与原车道前车安全车距增加约16.5%;横摆转动惯量影响较小,当横摆转动惯量增加50%,本车与原车道前车安全车距增加约1.8%;车速也是影响纵向安全车距的重要因素,车速每增加10 km/h,安全车距增加约7%;此外,附着系数对安全车距也有一定影响,附着系数降低30%,安全车距增加1%~2%。从本车与目标车道前、后车安全车距的变化趋势看,各相关因素对安全车距的影响基本一致。在实际情况下,由于本车与周围汽车的相对速度有较大差异,因此安全车距需要根据具体情况进行量化。
4 结论
利用Prescan 建立智能汽车高速换道避障场景和动力学模型,通过仿真分析,掌握了智能汽车高速换道轨迹等运动特性,提出了适用于智能汽车高速换道避障的安全车距计算模型。通过改变系统反应时间、汽车动态参数和道路附着系数,明确了典型因素对安全车距的影响。基于Prescan 的智能汽车虚拟场景建模仿真为智能驾驶系统的开发提供了可靠的工具,能够有效提高智能系统开发效率。仿真结果表明,转向频率对换道轨迹和侧向加速度有直接影响;在转向频率相同的情况下,智能汽车换道安全车距与人机—车—路及环境因素密切相关,系统反应时间和汽车速度/加速度是安全车距的主要影响因素,反应时间和车速越大,要求安全车距越大,而汽车的横摆转动惯量和路面附着系数也会对安全车距有一定影响,横摆转动惯量增大,附着系数降低,都要增加安全车距。在保证安全避障情况下,高速换道路径规划考虑了乘员舒适性的要求,保证换道决策规划兼顾安全、舒适和高效,满足人的乘坐要求。相关研究涉及智能汽车在典型高速换道避障场景中的路径规划问题,可为智能汽车决策规划系统的研发提供技术参考。