空间平台机动策略及可行性研究
2020-12-31李重远樊姣荣东华鹏刘小旭王传魁
李重远,樊姣荣,东华鹏,刘小旭,王传魁
(1.北京宇航系统工程研究所,北京,100076;2.中国运载火箭技术研究院,北京,100076)
0 引 言
空间平台承载有效载荷长期在轨运行。结合空间态势感知信息,形势紧张时,由工作轨道机动至高度更低的快速响应轨道,提升对地面目标覆盖频率,缩短对地面目标响应时间,从而对形势施加压力;如果形势得到缓和,空间平台由快响轨道机动返回工作轨道,节省长期在轨轨道维持所需推进剂。如果形势需要,空间平台分离有效载荷,由离轨舱携有效载荷从快响轨道机动至地面执行任务。如果所有有效载荷均完成离轨,空间平台变轨至高轨道实施在轨服务,最大程度挖掘空间应用飞行器利用价值是空间平台研制中应该重点思考的问题。
1 机动策略总体思路
图1 为空间平台机动策略总体思路示意。空间平台由基础级运载火箭发射①至工作轨道②,形势紧张时由工作轨道机动③至高度更低的快响轨道④,如果形势需要则有效载荷离轨至地面执行任务⑥,如果形势缓和则由快响轨道返回⑤工作轨道,如果所有有效载荷均完成离轨,空间平台提升轨道高度⑦,实施对高轨道⑧飞行器在轨服务。
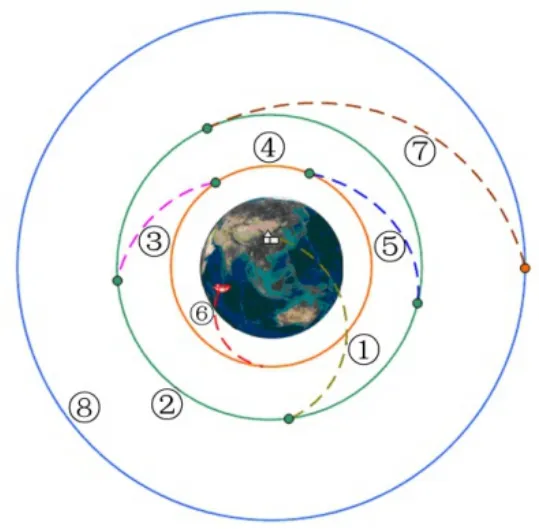
图1 空间平台机动策略总体思路Fig.1 The Overall Technical Schematic of Orbit Maneuver Multifunctional Strategy in Space Platform
2 空间平台机动策略变轨方式分析
空间平台机动策略所述的降轨快速响应、升轨在轨服务、离轨对地执行任务等,都以轨道动力学为基础,本节对适用于策略的变轨方式进行分析。
2.1 适用于降轨快速响应的霍曼转移变轨方式
从策略总体角度分析,空间平台应具备多次从工作轨道往返快响轨道的能力,所以应采取节省能量的霍曼转移方式。在霍曼转移变轨过程中,空间平台通过两次点火获得两次脉冲推力,霍曼转移轨道与变轨前后两条轨道相切[1]。空间平台的霍曼转移变轨过程如图2 所示。

图2 霍曼转移变轨Fig.2 Horman Orbital Transfer Technique
工作轨道角速度、快响轨道角速度分别为n1、n2,工作轨道半径、快响轨道半径分别为1r、2r ,则有:

工作轨道速度、快响轨道速度分别为v1、v2,则,

根据图2 得轨道半长轴 :

则可知空间平台在霍曼转移轨道远地点C 速度为

根据式(3)、式(6)可得空间平台第1 次变轨需要的速度增量为

同理,空间平台在近心点B 的速度为

根据式(4)、式(8),空间平台第2 次变轨需要的速度增量为

由式(7)、式(9)可得霍曼转移变轨空间平台的速度脉冲数量之和为

2.2 适用于升轨在轨服务的空间交会变轨方式
空间平台对高轨目标实施在轨服务是一个空间交会过程,工作轨道与目标轨道之间不仅存在轨道高度差异,还存在轨道倾角差异,因此,空间交会变轨将包括一个同平面的霍曼转移和一个轨道平面的机动过程。空间交会变轨过程如图3 所示。转移完成后假设t0时刻目标处于P0点,空间平台处于P1点并且其速度矢量为,通过发动机点火变轨施加速度增量Δv,使得空间平台在P1点的速度矢量调整为并进入转移轨道,经过一段时间飞行,目标和空间平台同时到达P2点,空间平台通过精确末制导实现对目标的空间交会服务。Δv 可通过普适变量解高斯问题求得[2]。
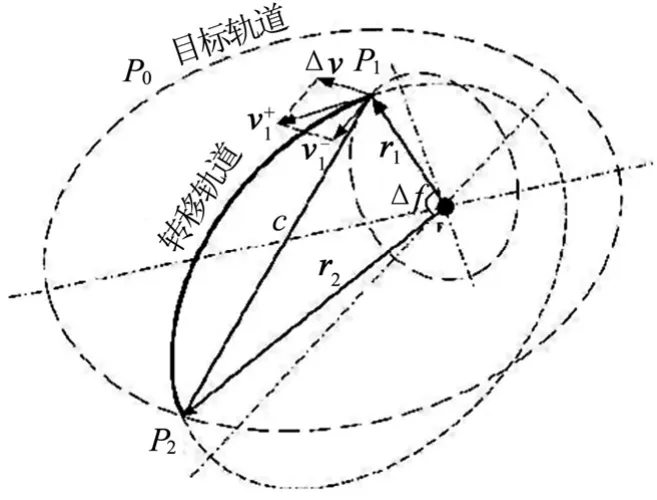
图3 空间交会变轨示意Fig.3 The Technical Schematic of Orbit Maneuver during Space Rendezvous
r1、 r2、3 个矢量关系以普适变量表示,如式(11)、式(12)所示。


式中 p 为半通径;μ 为地球引力常数。
则可求出空间平台的速度需求为

2.3 适用于对地任务的有效载荷离轨方式
为充分发挥空间平台空间应用价值,需为有效载荷配置离轨舱,由离轨舱携有效载荷轨道机动至地面执行任务。离轨舱负责携有效载荷从工作轨道机动至轨道高度约120 km 的交班前,之后由有效载荷对地执行任务[3]。图4 为离轨制动点与再入点关系。离轨制动点地心距、交班点地心距、再入点速度和当地速度倾角均已知。
根据椭圆轨道运动理论,再入点与制动点满足能量守恒和动量矩守恒定理:
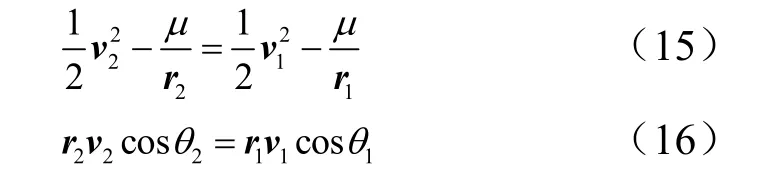
根据式(15)和式(16),已知1r ,2r , v2,2θ 的值,可求出1v 和1θ :
由余弦定理,可知离轨舱携有效载荷离轨需要的速度增量为

3 空间平台机动策略可行性分析
3.1 快速响应效果分析
空间平台采取由工作轨道机动至高度更低的快响轨道的方式对地面目标施加压力。空间平台长期运行的工作轨道,选取 400~600 km 太阳同步轨道(Sun-synchronous Orbit,SSO)。快响轨道选取普通圆轨道即可。降轨机动能够缩短离轨对地响应时间如表1 所示。

表1 快响轨道相比工作轨道缩短对地响应时间 单位:sTab.1 The Ground Response Time of Fast-response Orbit in Comparison to Working Orbit
由表1 可以看出,快响轨道相比工作轨道对地响应时间明显缩短。长期在轨平台突然加快对地响应速度,能够明确体现对地面目标施加压力的意志。
3.2 轨道机动能量需求
根据空间平台机动策略总体思路,选取400~600 km SSO 作为工作轨道,200~500 km 圆轨道作为快响轨道,700~2000 km 轨道高度作为空间交会目标,根据第2节推导的式(10)和式(14)计算空间平台轨道机动所需速度增量,如表2 所示。
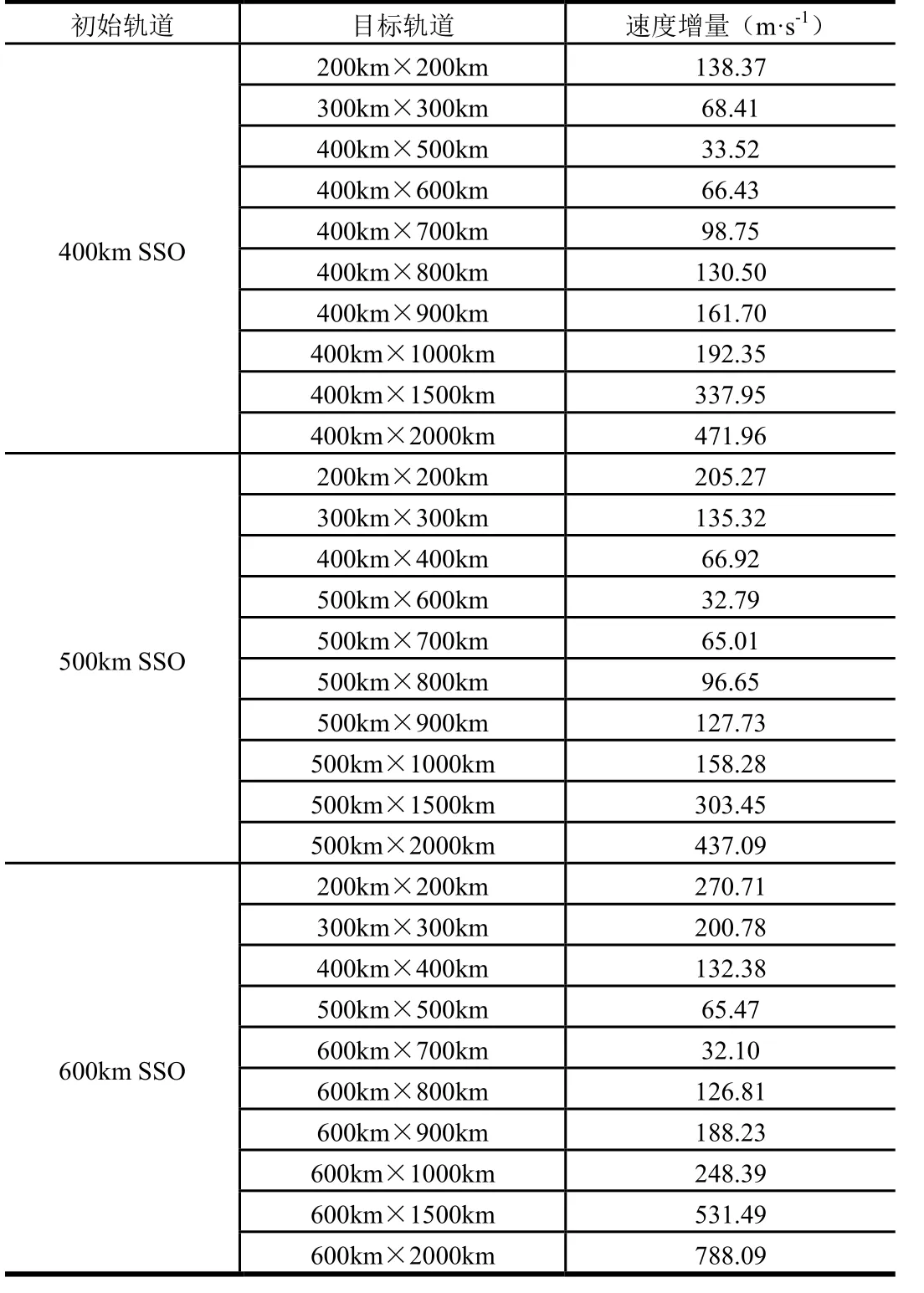
表2 空间平台轨道机动所需速度增量Tab.2 Required Velocity Increment for Space Orbital Maneuver
空间平台由工作轨道机动至快响轨道再升轨至工作轨道为1 次行动,按空间平台在轨期间实施3 次行动考虑,由表2 统计得出所需速度增量,如表3 所示。
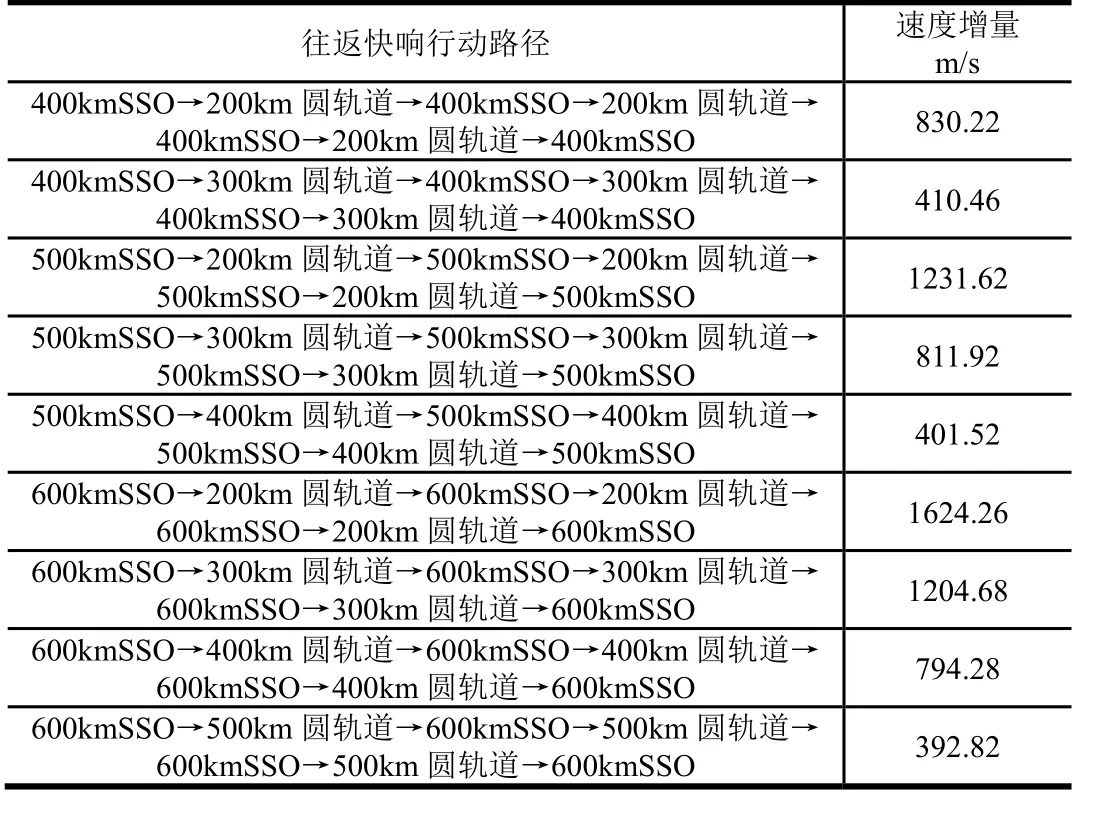
表3 往返快响行动所需速度增量Tab.3 Required Velocity Increment for Fast-response Round Tripping Orbital Transfer
3.3 轨道维持能量需求
空间平台需要考虑长期在轨轨道维持所需能量,分别针对400 km SSO、500 km SSO、600 km SSO 3 类工作轨道进行计算。低轨主要摄动因素为大气阻力摄动,其次考虑地球非球形摄动、日月引力摄动、太阳光压摄动等,本文不作详述[4]。
工作轨道半长轴和倾角变化如图5~ 7 所示。
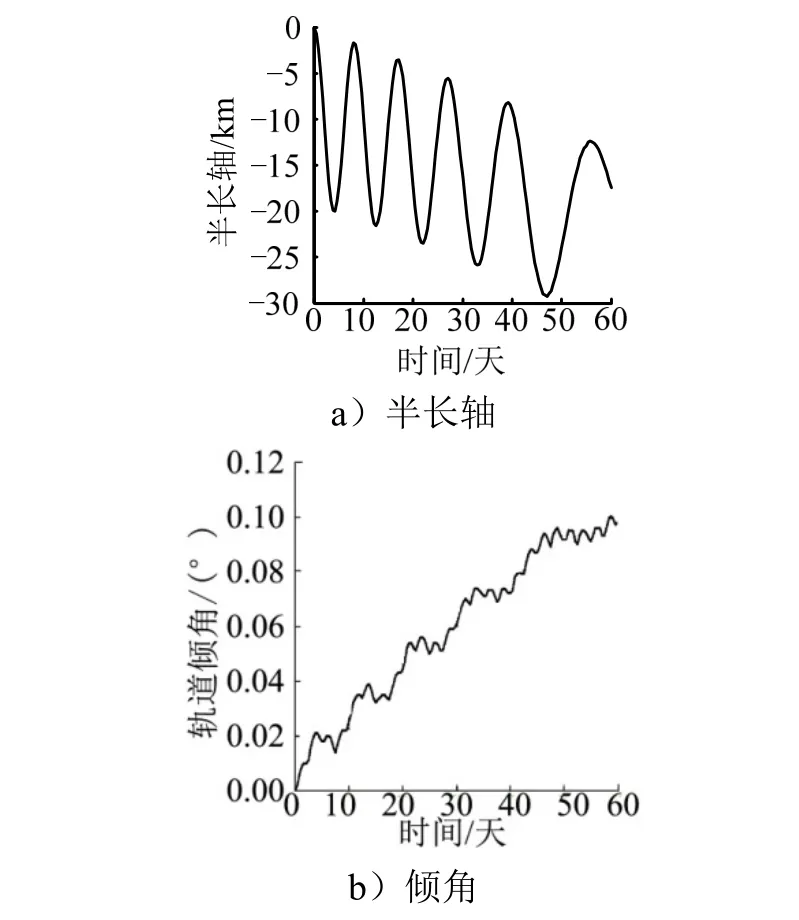
图5 400km SSO 半长轴和轨道倾角2 月内变化情况Fig.5 The Changing State of Nominal Semi-majoraxes and Inclination for 400km SSO Working Orbit n Two Months
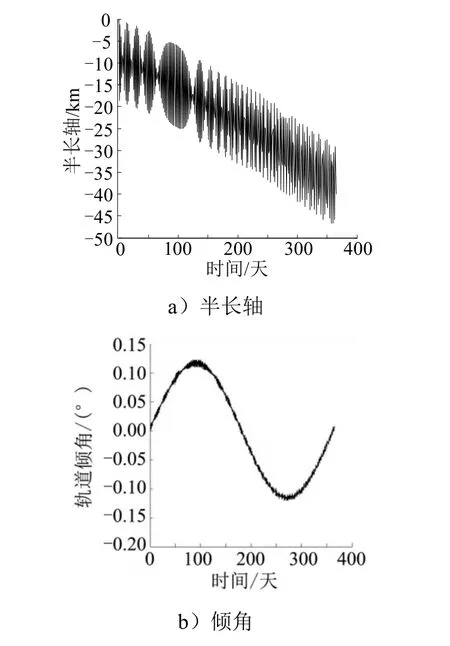
图6 500km SSO 半长轴和轨道倾角1 年内变化情况Fig.6 The Changing State of Nominal Semi-majoraxes and Inclination for 500km SSO Working Orbit in Two Months
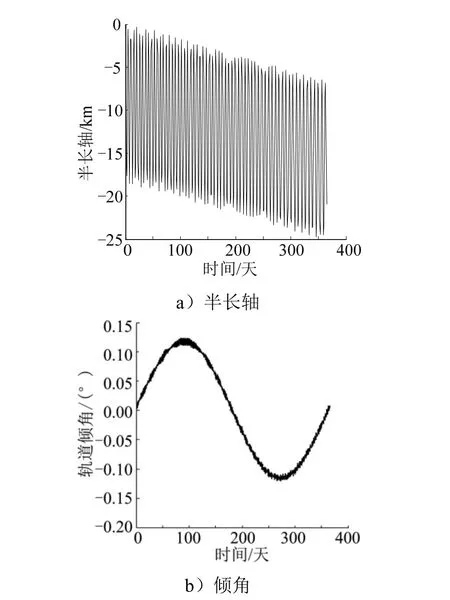
图7 600km SSO 半长轴和轨道倾角1 年内变化情况Fig.7 The Changing State of Nominal Semi-majoraxes and Inclination for 600km SSO Working Orbit in Two Months
由图5 可知空间平台长期在轨需进行轨道维持来补偿大气阻力等各种摄动造成的轨道衰减,主要是轨道高度的降低,轨道倾角长时间呈周期变化,可以不用修正。对于400 km SSO 工作轨道,每2 个月需进行一次轨道维持,每次维持需约18 m/s 速度增量,每年约108 m/s,5 年共需540 m/s 速度增量进行轨道维持。由图6 可知,对于500 km SSO 工作轨道,1 年半长轴衰减量约30 km,每12 个月进行一次轨道维持即可,每次维持需约17 m/s 速度增量,5 年共需85 m/s 速度增量进行轨道维持。由图7 可知,对于600 km SSO 工作轨道,1 年半长轴衰减量约7.5 km,每24 个月进行一次轨道维持即可,每次维持需约9 m/s 速度增量,5 年共需要18 m/s 速度增量进行轨道维持。
3 类工作轨道的轨道维持速度增量汇总列于表4。
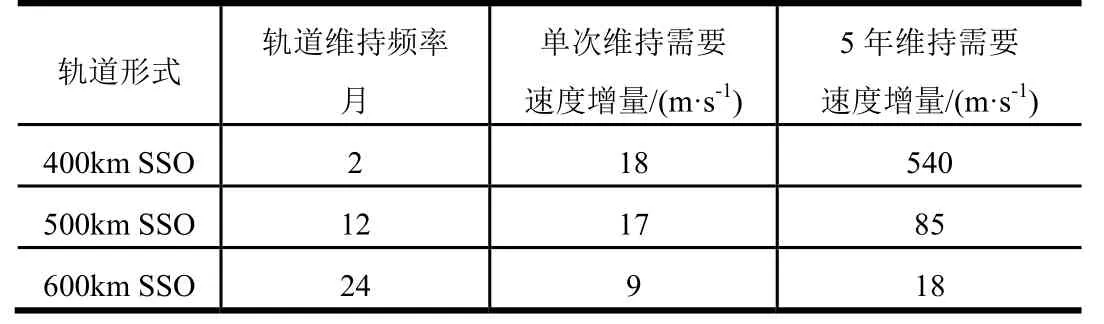
表4 3 类工作轨道的轨道维持速度增量统计表Tab.4 Vlocity Increment for Three Different Working Orbits
3.4 空间平台选择建议
空间平台的主发动机和离轨舱发动机比冲按3038 m/s 考虑,根据第2 节推导的式(19)计算离轨舱携有效载荷离轨所需速度增量约320 m/s;根据空间平台轨道机动和轨道维持能量需求分析,综合考虑目前基础级火箭运载能力[5]以及任务可行性,建议空间平台总速度增量不超过1400 m/s。
根据表4 轨道维持所需速度增量比对分析,轨道高度超过500 km 后,5 年轨道维持需要的速度增量大幅降低,所以建议工作轨道选择500~600 km SSO 轨道,减小长期在轨推进剂消耗。综合考虑某型在役基础级火箭运载能力,500 km 相比600 km SSO 轨道,运载能力高约1000 kg,而500 km 相比600 km SSO 轨道,5 年轨道维持仅需多消耗推进剂约150 kg,所以建议工作轨道选择500 km SSO 轨道,5 年轨道维持速度增量需求85 m/s;根据表3 比对分析,建议降轨快响行动选择“500 km SSO→300 km 圆轨道→500 km SSO”的3 次往返路径,速度增量需求811.92 m/s;根据表2 计算结果,假设空间交会目标在2000 km 轨道高度,则从500 km SSO 轨道机动速度增量需求437.09 m/s。85+811.92+437.09=1334.01<1400 m/s,适用于空间飞行器多功能机动的平台规模可行。
4 结束语
通过对空间平台机动策略及可行性研究,为空间飞行器应用提出了有效措施和建议。本文设计的3 类变轨方式能够很好地适应策略中降轨快响、在轨服务和对地执行任务等多样模式,通过响应速度和能量需求分析,论证了策略能起到的效果,并且适用于空间飞行器多功能机动的平台规模可行。