GNSS定位系统在智能塔机的应用
2020-12-30李加敖李洪鹏房海波李小松
李加敖,李洪鹏,房海波,谢 鸣,李小松
(1.山东中建众力设备租赁有限公司,山东 济南 250022;2.中建八局第二建设有限公司,山东 济南 250022;3.武汉港迪电气传动技术有限公司,湖北 武汉 430040)
塔机智能化是大势所趋,现今塔机操控技术虽在新时代的冲击下得到了发展,但由于其应用领域和技术水平的特殊性,智能化程度不高,塔机依旧在沿袭传统的操控手段。传统的人工操作有以下弊端:①塔机安全性对操作人员的能力及素质依赖高,长时间的简单重复动作,极易疲劳,误操作、违章操作导致的安全事故频发;②操作环境狭小、上下班需攀爬塔机,恶劣的工作环境和工作内容使得年轻人都不愿从事塔机操作工作,使得塔机司机极端欠缺。
随着控制技术、通讯技术、传感技术、计算机技术等技术日趋成熟,将这些新技术应用到塔机操控上,实现塔机智能化已是迫在眉睫。而实现塔机智能化的关键技术之一就是无人驾驶下智能定位及跟随技术。为此,中建八局第二建设有限公司、山东中建众力设备租赁有限公司联合武汉港迪电器公司成功开发了GNSS 定位系统并在无人操作塔机进行了测试,定位精度及响应时间基本达到了预期目标。
1 GNSS定位系统的组成
GNSS 定位系统由无线AP、CORS 站接收机、平板移动站、PLC、交换机组成,无线AP、PLC、HMI及CORS站接收机通过交换机相连接,平板移动站通过无线AP 的WiFi 网络与CORS基站接收机通讯(图1);CORS 站接收机、交换机、PLC 安装在平衡臂根部配电箱处,无线AP安装在平衡臂中部,无线AP 天线安装在平衡臂端部,平板移动站由操控人员手持,位于吊物起吊位置及就位位置。
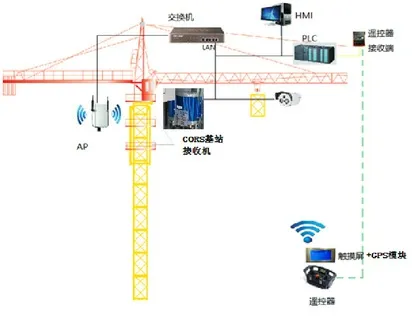
图1 GNSS定位系统的组成
2 GNSS定位系统的工作原理
GNSS 定位系统使用RTK 技术完成塔机与无线远程移动终端(操控人员)的定位,CORS站接收机自身的高精度位置信息通过交换机传给PLC 设置为塔心经纬度坐标,接收机作为基准站。平板作为流动站通过无线AP 的WiFi 接收基准站的差分信号,消去共同误差式平板能得到高精度的卫星定位信号。平板内置塔机智能远控APP 通过内部程序获得平板的经纬度坐标。
平板APP 通过无线AP 的WiFi 与PLC 进行通讯,获得塔心的经纬度坐标,并根据算法建立一个以塔心为坐标原点以正东为x轴,正北为y轴的平面坐标系。计算出平板所在位置(经纬度坐标值)与塔心之间的实时距离,以及平板位置在建立的平面坐标系中的x值、y值,并换算得到平板与塔心所在连线与正东方向所成的角度(-180°~180°)。
平板到塔心的距离即为小车运动的实时变幅距离,只需要将平板在坐标系中的角度跟塔机的回转角度关联起来就可以得到平板所在位置的回转角度。
如图2 所示,侧塔机俯视图,以塔心为坐标原点,正东为x轴正向,正北为y轴正向建立的坐标系中,A 小人所在位置为平板经纬度坐标换算所得的实时位置,同时显示的塔机臂架实时角度。
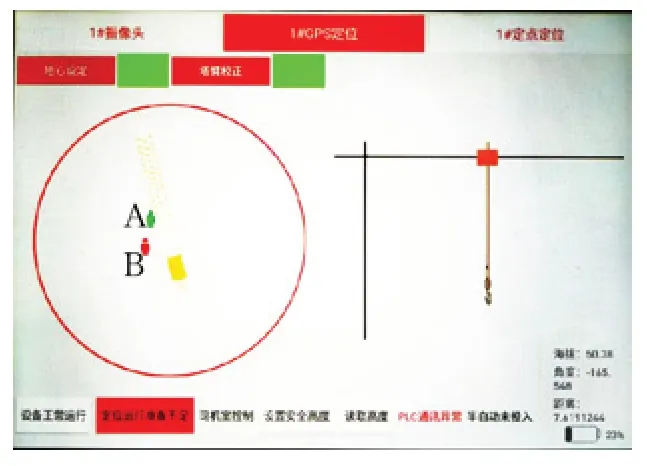
图2 GNSS定位系统显示界面
塔机回转角度的0°不变时,它与正东方向所成的角度是一个固定值,因此只需要在平板坐标角度之上减去这个固定值就可以获得平板所在位置的塔机回转角度值,计算公式如下所示

式中α——平板位置塔机回转角度;
β——平板实时坐标角度;
γ——塔机0°时平板在塔臂下获得坐标角度。
根据实际情况,进行塔臂校正时不一定要在塔机回转0°进行,根据实际工况塔臂校正时的计算公式如下可以转化为

式中α——平板位置塔机回转角度;
β——平板实时坐标角度;
δ——塔臂校正时坐标角度;
θ——塔臂校正时回转角度。
综上所述,通过平板与PLC 的通讯,PLC可以获得平板所在位置的变幅距离、回转角度,只需要再设置一个起升高度,就可以有一个明确的吊装目标位置。通过平板与遥控器的操作,将当前平板所在位置设为塔机半自动运行的目标位置,启动半自动,塔机将会完成半自动运转吊钩到达平板所在位置上方,完成塔机呼唤功能。
根据RTK 差分卫星定位法通过接收机发来的差分信号,使得安装了卫星定位模块、差分服务软件的平板获得高精度(厘米级)的卫星定位信号。
3 GNSS定位系统在智能塔机测试
我单位在厂区对QTZ160 塔机对GNSS 定位系统进行了测试:测试点(可分固定点和移动点)分布塔机不同方位、不同高度(模拟现场施工的不同工况),分别进行空载和吊载测试;在塔机半自动运行各项准备工作完成后,手持移动平板的操控人员在测试点按下遥控器“呼唤”键,塔机自动从初始位置先起升至安全距离,然后回转、变幅联动至测试点上方,吊钩下降至安全距离停止,经多次测试吊钩中心至测试点误差10cm 以内,定位精度达到预期目标;末端少量工作可采取人工干预,完成整个吊装过程。
4 结语
GNSS 定位系统在智能塔机成功测试为塔机智能远控做出了有益探索,为塔机智能远控提供了一个可选项,但GNSS 定位系统存在响应时间较长问题,对塔机运行效率有一定影响,需进一步改进,为智能远控塔机进入施工现场奠定基础。
