航天飞航铸造油箱舱段类产品快速精确找正方法研究
2020-12-29王波刘玉平董李扬
王波 刘玉平 董李扬
【摘 要】文章针对目前航天飞航典型铸造油箱舱段类产品在找正过程中存在时间长、误差大的难点,通过使用三维扫描技术与目前钳工划线找正方法相结合,从而提高找正划线的精度,提高此类油箱的制造效率。
【关键词】铸造油箱舱段;划线;三维扫描
【中图分类号】TG249.2 【文献标识码】A 【文章编号】1674-0688(2020)11-0050-03
0 引言
随着技战术指标要求的不断提高,导弹武器产品的结构形式越来越复杂,而弹体舱段中又以油箱舱复杂程度最大:一方面,导弹射程增大,载油率要求提高,对油箱容积的要求不断提升;另一方面,全弹结构紧凑程度越来越高,为了安装弹上器件,经常将油箱位置挤压到非规则部位。因此,原来以规则舱体形式出现的油箱舱变成“插空”安置的复杂结构,尤其是对于壁厚为2~4 mm的薄壁类油箱,结构形式更复杂。
这类复杂铸造油箱舱段在机械加工时找正困难,以传统的划线方法找正,不仅耗时长且精度较低,常常因找正不准确导致产品报废,因此需要引进新方法对铸造油箱舱段进行精确的快速找正,突破该类舱段精确划线找正难点,提高此类产品的制造效率及合格率[1-2]。
1 制造指标及难点分析
典型的航天飞航铸造油箱舱段均为铸铝材料,外表面壁厚要求为2~2.2 mm,壁厚可正向超差(厚度加大),但产品加工完成后,重量不能超过理论重量的5%。
这类产品加工工艺方案一般为铸造→T6热处理→划线→粗加工→划线→精加工,铸造并经热处理T6强化后,其内壁形状已发生改变,原铸造留量已消失或局部留量变大,因为内腔深度大,其内部形面无法加工,所以只加工有配合要求的特征。同时,受制于重量指标的限制,铸造时内腔内形面留量一般为0.5~1 mm,其壁厚尺寸则由已加工的外形形面与铸造内形形面组成,壁厚控制难度大,常在机械加工过程中发现铸件局部不能满足要求而发生报废。有些报废产品是铸件本身形面发生偏离造成的报废,还有些产品则是加工基准选择不准确导致壁厚超差而报废的,因此机械加工前的划线确定加工基准是铸造油箱舱段加工过程中的关键步骤,也是目前生产中的技术难点。
2 划线方案分析
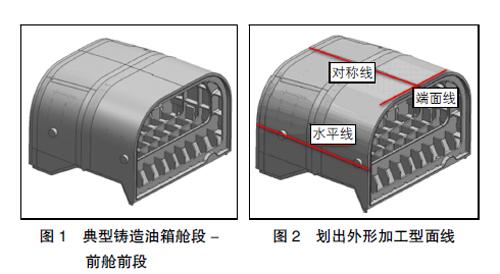
典型的铸造油箱艙段划线方法比较单一,通常使用内腔形面中的关键特征作为划线基准,将内形关键特征形面线返到舱段外形面上,作为外形加工基准进行留量加工,加工完成后测量外形壁厚数据,再进行一次借量划线并进行精加工[3-4]。这种方法因不能全局照顾内形型面与外形型面贴合度而导致加工过程中壁薄情况的发生,影响了产品合格率,且不能及时判断铸造产品是否合格,只能通过粗加工进行判断,从而浪费了巨大的机械加工资源。以典型的航天飞航油箱舱段前舱前段(如图1所示)为例,产品合格率仅为70%,余下30%的报废品中有以下4种情况。①7%~10%的产品是在划线时判断内腔形面严重偏离而直接报废。②20%左右的产品是在划线时判断存在报废风险,但因划线精度限制不能完全相信划线的准确性,需要通过粗加工进一步判断是否报废,经统计这部分产品最终有约25%可加工出满足要求的产品,其余则在粗加工完成后报废。③7%~8%的产品是在精加工过程中发现外形形面已加工完,在加工形面上特征(比如凹台、钻孔等粗加工不能进行加工验证的特征)发现壁厚超差导致报废的。④其余为其他原因导致报废。
通过前舱前段的统计分析可知,如能提高划线精度,则可在产品加工前准确预判可加工性,从而可以将第二种情况约15%的产品直接报废,省去这部分产品的粗加工过程,节约大量机械加工资源。可将第三种情况的产品在划线阶段考虑其壁厚要求,偏置到划线基准上,从而可以避免产品的报废。
3 提高划线精度技术路径分析
经分析,导致目前划线方案不准确的根本原因在于加工之前未能将铸件内部形面进行全面分析,只是选择了几个关键的特征作为分析基准,基准选择的不全面导致划线不精确,未能完全反映铸件内腔状态[5]。如果能在划线时全面掌握舱段内部形面数据,并能将其数据与已有基准之间建立模型关系,则可实现舱段在划线时的精确调整,从而实现精确划线[6]。因此,新的划线方案需解决3个关键点。①快速、精确地获得铸造舱段内部形面与外部基准相对位置关系数据。②建立内部形面数据与外部已有基准之间的数学模型。③按模型数据计算数值指导调整划线。
3.1 获得舱段内部形面与外部基准相对位置关系数据
依据零件外部特征选择外部基准,如果工件外部形状全部为自由曲面或已有特征精度太低,则需在铸造时预留工艺块,并在划线开始前将其加工为规则形状。
因铸造舱段一般为非规则筒形零件,内部空间相对狭窄,依据其内部结构特点可选择不同的数据获得方法,目前已较成熟且精度可满足要求的测量手段主要为非接触扫描及关节臂接触式测量,前者适用于舱段内部空间较大、开放性较好的零件,其扫描速度快,特征数据获取全面。后者可用于内部空间舱段相对狭窄的零件,其获取数据速度较慢,可通过每个固定范围选取特征点的方式获取数据,一般在100 mm×100 mm范围内测量5个点,如遇铸造平面突变尤其是凹陷,需在凹陷位置测量多个点,尽量找到凹陷位置的最低点。
3.2 建立内部形面数据与外部已有基准之间的数学模型
该过程是判定铸造零件可加工性与精确找正划线的关键,判断零件可加工性实际就是将零件内壁形面与采集的内壁数据点进行拟合,一般会出现3种情况。
(1)采集的数据点全部位于理论模型的外部,则判定零件可以继续加工。
(2)采集的数据点部分位于理论模型内,部分位于理论模型外,则需调整理论模型与采集的数据点之间的相对位置关系,直至所有采集的数据点完全位于理论模型内壁形面外部,此时判定该零件可以继续加工。该过程中使用关节臂进行内壁形面数据采集,因采集到的点全部为需保证壁厚或重要的尺寸部位点无冗余点,所以可以使用软件中的自动拟合步骤将内壁形面与采集的数据点进行自动调整,如使用非接触式扫描设备进行内壁数据采集,因其采集的点太多,所以需要将不重要的点(如筋条)删除再使用自动拟合或手动拟合忽略非关键部位点数据。
(3)采集的数据点无论如何调整,始终无法完全位于理论内形面外,则可判定零件报废。
在判定工件的可加工性之后,依据理论模型的水平、对称、端面等要素建立3个平面,这3个平面分别与理论模型相交可形成划线位置,测量3个平面分别与工件外部基准(外部形面选取的基准的采集数据点)之间的相对位置关系。
3.3 按模型数据计算数值指导调整划线
按上一步中3个平面与外部基准采集数据点之间的位置关系计算出外部基准应调整的具体数值,并按数值调整待划线工件。
4 实例
以前舱前段为例(如图1所示),该舱段宽度为900 mm,高度为700 mm,开敞性较好,可以使用非接触式扫描设备扫描内腔,本实例中使用HandScan700型三维扫描仪扫描铸件内部形面数据,其具体实施方案及步骤如下。
4.1 预留基准凸台
新方案的核心为建立内部形面与划线基准之间的数字模型关系,该划线基准放置到外形面上更有利于后期测量调整油箱姿态,因此在铸造前舱前段初始阶段需在外形面上加工出作为划线基准的特征。
铸造工件时,在前舱前段外形上预留基准凸台,因舱段在铸造时一般留有浇道,可选择保留部分浇道作为基准凸台,也可在铸造时有选择地预留基准凸台。注意该步骤中基准凸台需分别大致位于水平线、对称线及端面线上,且位于水平线、对称线及端面线上的基准凸台为4个(外形对称位置,每侧2个)。
4.2 加工基准圆台
机械加工时先通过内腔上的关键部位作为基准,将基准凸台加工为规则的圆台,使该圆台成为基准圆台,再以该圆台为基准将铸造舱段用千斤顶支撑放置到平板上,粗略调整千斤顶,使基准圆台保持水平。注意该步骤中同一基准线上的基准圆台需大小一致,以方便后期计算。如图2所示,划出外形加工型面线。
4.3 判断零件加工性
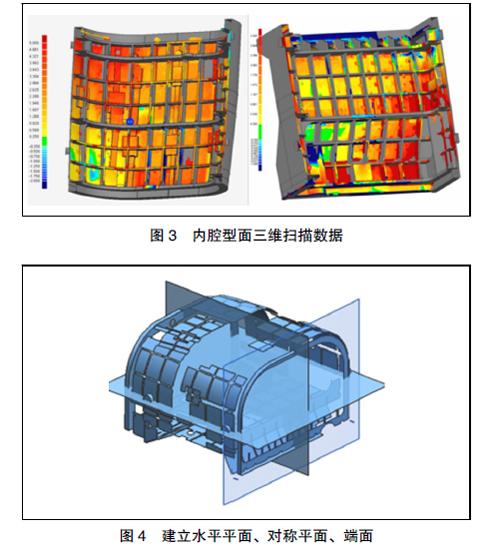
使用三維扫描仪扫描内腔形面及基准圆台,注意扫描外形时仅需扫描基准圆台,构建内腔形面与基准圆台点云图,并与内腔理论模型比对。因为铸造舱段内部筋条位置要求较低,所以在比对时需忽略筋条数据,手动调整内壁理论模型与扫描点云位置关系,直至内壁点云颜色全部为尺寸范围内颜色,则判读零件可以继续加工,如经调整后,点云与模型仍不能满足要求,则判断零件不可加工,如图3所示,内壁中数据均为正向超差,只在筋条位置与凸台等尺寸要求不严格位置为负向超差,此时模型姿态已可满足加工要求。
4.4 建立坐标平面
将可继续加工的工件,依据最终模型与点云调整姿态建立基于内腔点云的水平平面、对称平面、端面(如图4所示)。3个坐标平面为基于点云(铸造舱段实物内腔形面)的整体反映。
4.5 计算偏差数值,调整舱段
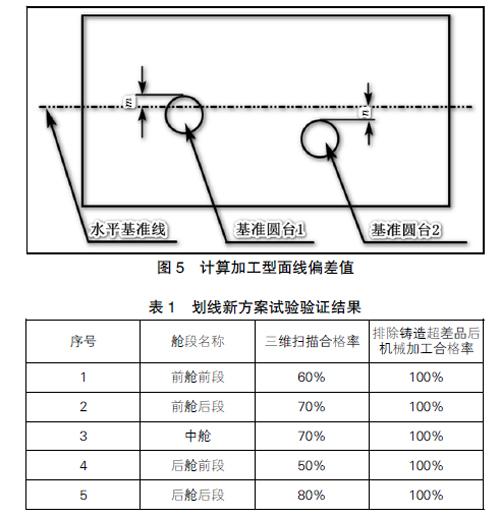
测量“4.4节”中建立的坐标平面与扫描基准圆台之间的数值,该数值为基准圆台与内腔位置关系的实际偏移数值,如图5所示,并按此数值调整支撑工件的千斤顶,将工件调整至两基准圆台间距为“m+n”,其对称面同理调整,此时工件已为水平姿态,按图5所示左侧m值划线即为铸造舱段的水平基准线,按此方法可依次划出对称线及端面线,并以此作为后续机械加工的精确基准。
5 试验验证
在采用新划线方案后,某型产品油箱(包括前舱前段)共计5个舱段,分别进行一个批次各10件、共计50件产品的生产验证,在初次扫描检测时,共排除17件铸造不合格品,对剩下的33件产品按划线新方案进行找正,全部加工合格,部分产品加工完成后测量壁厚发现,舱段壁厚对称区壁厚为2~2.1 mm,间接验证了该方案的精确性(见表1)。
6 结语
经试验验证,铸造油箱舱段按新方法进行划线找正极大地提高了划线精度,避免了因划线不准确造成的机械加工资源浪费,同时提高了产品的合格率。但此种划线方案使用了三维扫描和钳工划线两种精度相差较大的方法相结合,未能将三维扫描的高精度测量结果完全反映到产品加工中,后续将开展在机床上进行三维扫描并同步调整程序坐标系(将“4.5节”中需调整的数值转换为数控程序中对坐标系的平移、旋转)的方案直接在线找正,该方法将能更直接地将三维扫描结果反映到产品上,从而进一步提高油箱找正的精确度,缩短此类铸造油箱的制造流程。
参 考 文 献
[1]岳小东,孟祥炜,张妍,等.面向机加工的异形复杂铸件三维扫描坐标基准匹配应用[J].铸造技术,2019(8):
842-844.
[2]刘俊,刘泗溢,杜海军,等.钛合金精密铸件基准传递形式应用综述[J].精密成形技术,2018(3):137-142.
[3]渠铸,汪洋,柳洋.铸件结构设计中基准选择探讨[J].铸造技术,2016,37(5):1066-1068.
[4]卞亚峰,王晓慧,徐小龙.浅析铸件毛坯尺寸标注基准的合理选择[J].机械制造,2013(2):65-67.
[5]任红兴,杨保.精加工铸件三维检测技术的应用[J].中国铸造装备与技术,2014(3):65-66.
[6]黄东,南海,赵嘉琪,等.三维测量技术在精密铸件加工中的应用[J].特种铸造及有色合金,2015(2):172-
173.
