基于PLC控制的翻转装配机器人的设计与研究
2020-12-28杨要恩刘明治王志伟
杨要恩 刘明治 王志伟
摘 要: 针对传统的车架装配翻转机往往只是通过千斤顶等简单的锁链捆绑进行作业,导致安全系数低及费时耗力的不足,设计一种新型任意角度大小可控的翻转装配机器人。依据所装配车架大小各异的特点设计该装备的可调整大小夹取机构,并采用PLC控制模块对红外传感器及无线收发模块进行控制系统设计。对所设计的翻转装配机器人进行实验研究,结果表明,该翻转机器人可以完成对大小不同车架的抓取、抬升和旋转等任意角度可控的装配工作,实现更高效、更安全、更方便的装配工作任务。
关键词: 机器人; 翻转装配; PLC控制; 远程控制; 控制系统设计; 实验分析
中图分类号: TN876?34; TP242 文献标识码: A 文章编号: 1004?373X(2020)24?0005?03
Design and research of flip assembly robot based on PLC control
YANG Yaoen1,2, LIU Mingzhi1, WANG Zhiwei2
(1. School of Mechanical and Electrical Engineering, Xidian University, Xian 710071, China;
2. Department of Rail transportation, Shijiazhuang Institute of Railway Technology, Shijiazhuang 050043, China)
Abstract: In allusion to the fact that the traditional frame assembly flip machine often works with the simple chain binding such as Jack, which results in the shortages of low safety factor, long time?consumption and much labor?consumption, a new type flip assembly robot with controllable arbitrary angular change is designed. The clamping mechanism with adjustable size is designed according to the feature of different sizes of the assembled frame, and the control system of infrared sensor and wireless transceiver module is designed by means of the PLC control module. The experimental research on the flip assembly robot was performed. The results show that the flip robot can complete the assembly work of grabbing, lifting and rotating the frames with different sizes at any angles, and can complete the assembly task more efficiently, more safely and more conveniently.
Keywords: robot; flip assembly; PLC control; remote control; control system design; experimental analysis
0 引 言
目前常用的装配车架翻转机功能一般单一且固定不变,存在很大的限制,面对产业链的扩大,传统的翻转机器并不能应对市场的复杂且多样性需求。传统的翻转机翻转角度有限,且有部分翻转机只能针对与其相匹配的车架进行翻转,工人在作业中只能采取僵硬的操作姿势进行加工,长此以往,传统的翻转机就需要一些新型的技术加以应用升级。新型的翻转机器人在材料、结构、技术等方面都被优化,在面对现代企业生产结构里因翻转机器而造成的困扰都显得游刃有余,面对各种复杂问题就要求翻转机满足相应的移动简单、角度多面等优点。此外,新动力的注入可以使技术人员在进行加工的时候省时省力,且打破了多年以来技术人员只能采取僵硬的姿势来疲劳操作的难点,新型翻转机器人足以为技术人员提供各种最为理想的加工方式[1?4]。
1 新型翻转机器人总体设计
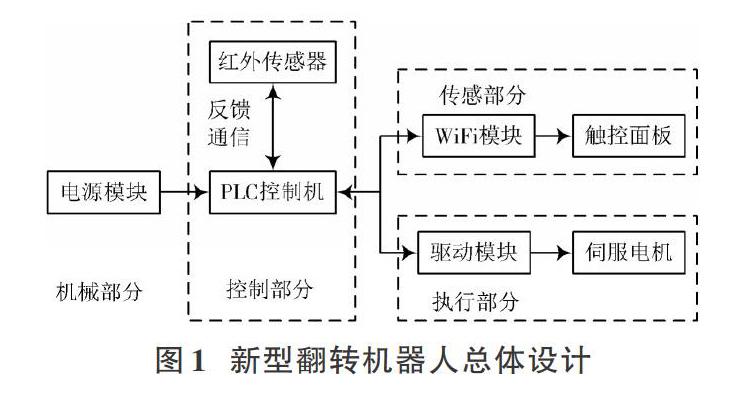
一般而言,机器人的总体设计结构由机械部分、控制部分和传感部分共同组成,而该翻转机器人的总体设计同样以这三大部分作为骨架来支撑起翻转机器人的各个功能的相关任务。机械部分是参考机械力学如何施加力的情况下,设计机械结构给受力物体施加合理的机械力,从而使得物体能够完成抓取、旋转等作业需求,并支撑起翻转机器人的基础框架和执行相关任务。控制部分是翻转机器人的最为重要的核心,这个部分是进行翻转机器人的信号接收和发送,来协调各个功能的運行完成作业任务,而控制系统设计的好与坏直接关系到翻转机器人能否正常运行以及作业的精度和整体的性能。传感部分主要是通过使用多个红外传感器来反馈翻转机器人的运行状态和确定翻转机器人的位置。红外传感器是一种检测装置,其能够感受被测量的信息,并能将感受到的信息按一定规律变换成为电信号或其他所需形式的输出信息,以满足信息的传输、处理、存储、记录和控制等需求,通过机械、控制和传感这三个部分之间的相互协调,从而实现了翻转机器人的所有功能。本文设计的新型翻转机器人,以PLC控制机为核心控制器,通过对PLC控制程序的逐步运行对伺服电机下达正反的转动命令,从而使翻转机器人实现相关操作动作和功能。翻转机器人可以通过与WiFi模块的通信,实现基于使用触控面板进行人为的对翻转机器人行为的干预与监控[5?7]。图1为新型翻转机器人总体设计。
该翻转机器人按照功能分为4个模块:无线通信部分主要是通过WiFi模块和触控面板共同组成,其主要功能是通过触控面板手动输入指令使翻转机器人停止运行或开始运行,WiFi模块接收指令后与PLC控制机进行通信,PLC控制机控制伺服电机接通或断开电源,最后由伺服电机的正反转完成翻转机器人的抓取、抬升、翻转的任务。电源模块主要是为翻转机器人提供220 V或380 V三相交流电,可以使翻转机器人持续工作长达24 h。
2 新型翻转机器人机械部分设计
2.1 抬升部
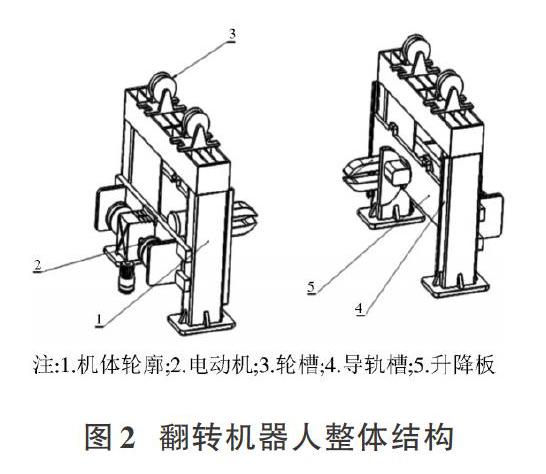
设计使用到1部电动机、4个轮槽、2条钢索、2条导轨槽、1根轴以及1个升降板。将电动机通过轴把2个轮槽连接到一起,使得电动机转动的同时通过轴带动轮槽一起运动。将2个轮槽按一定的间距安装到机体顶部,为钢索连接升降板提供中间支撑部分。在升降板顶部焊接有2个钢索连接口用来固定钢索,将升降板嵌入导轨槽,为升降板提供一个固定运动方向的支撑。最后使用钢索连接电动机两边的轮槽经顶部轮槽连接到升降板,用物理拉升力最终来实现车架的抬升。结构见图2。
2.2 夹取部
使用到1部电动机、3个齿轮、2根轴和2个夹子。在电动机上安上1个齿轮,与2个焊有齿轮的轴相互装配,再将轴连到2个夹子上。当电动机正向转动时,2个夹子对向绕轴转动将夹子张开,当电动机反向翻转时,2个夹子闭合,给物体施加压力,最终实现物体的爪取。结构如图3所示。
2.3 旋转部
使用到1部电动机、1根轴。首先在升降板上钻取一个和轴相同尺寸的孔,使轴有一定的间隙可以穿过并进行旋转,再将电动机连接到轴上并与升降板固定,而轴的另一端将机械爪的后部与轴焊接。当电动机运行时带动轴,轴上的机械爪便开始工作。
3 翻转机器人的控制与实现
本文设计的新型翻转机器人为了实现自动化的运行,翻转机器人的控制系统采用了PLC在伺服电机中的应用。对于系统细节的有效处理,则主要涉及PLC与伺服电机两个方面。伺服电机作为伺服系统的核心,其主要负责能量转换工作,因此相对于其他电机而言,其需要具备转换效率高、结构简单等特点。伺服电机又称为执行电机,在自动控制系统中作为执行环节,其能够根据相应的指令控制信号等,调整和优化机器的运行速度及方向[7?10]。
该翻转机器人配有红外传感器可时刻定位翻转机器人的状态。触控面板可以下达运行指令同时监控翻转机器人的运行状态,通过WiFi模块向PLC控制机通信,然后利用红外传感器协助各个伺服电机进行初始化定位。
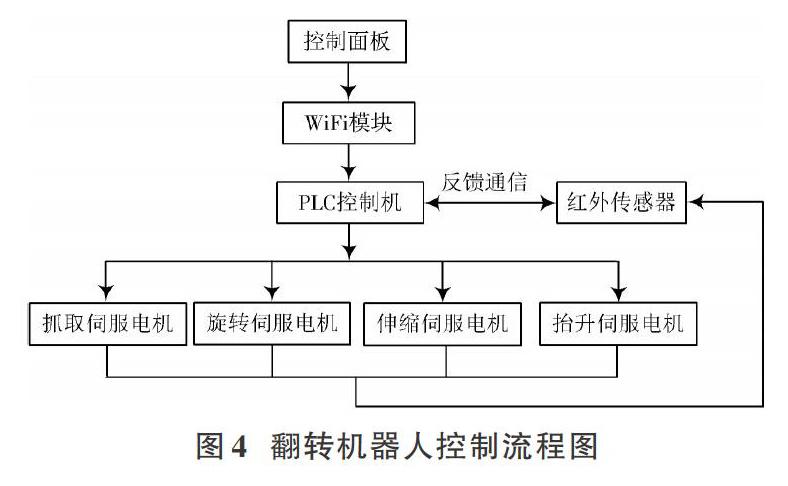
在翻转机器人的机架和机械爪上装配有多台红外传感器,当检测到车架进入后,将信号传给PLC控制机,控制机经过对程序梯形图的计算后,抬升伺服电机进行正反转执行下降、升起的指令;当机械爪与车架对齐时,传感器反馈信息给PLC控制机,控制机给伸缩伺服电机通电使其正反转执行机械爪的前进或后退指令;当机械爪接触到车架时,其传感器信息反馈给PLC控制机,控制机给抓取伺服电机通电,使其正反转执行抓取指令;當抓取到车架,PLC控制机收到反馈信息,最后控制机对旋转伺服电机给电,使其正反转,让翻转机器人最终执行旋转指令。
而在此期间工作人员可以通过触控面板进行监控翻转机器人的运行,如果运行中发现问题,可通过WiFi模块给PLC控制机下达停止指令,否则此前的运行指令将反复按PLC程序梯形图运行,便可完成一个流水线生产的自动化工作任务。图4为翻转机器人控制流程图。
3.1 翻转机器人自检
当翻转机器人接通220 V或380 V的三相交流电,翻转机器人会启动自检,红外传感器配合PLC控制机时刻保持通信,而PLC控制机同时给抬升、抓取、伸缩和旋转伺服电机通电,使其运行。红外传感器会将翻转机器人的升降板位置和机械爪的状态反馈给PLC控制机,控制机经过运算后将翻转机器人的初始位坐标及机械爪输出状态的数据下发给伺服电机,伺服电机接收到控制机的信息后就运行到指定坐标完成自检,等待车架进入运行程序。
3.2 翻转机器人运行过程
当车架进入工作区间,PLC控制机控制抬升伺服电机正转,电机正转使钢索放松升降板靠自身重量缓慢沿着导轨槽下降,升降板下降到与车架平行时会碰到红外传感器,传感器反馈信息给PLC,PLC把抬升电机的电断开使升降板停止;PLC同时给伸缩电机供电,伸缩电机正转推动机械爪向前运行,当车架撞到机械爪内侧的传感器,伸缩电机停止运行,抓取电机得电,正转机械爪向内收紧。本文新型设计的翻转机器人的机械爪的爪头上安装有压力传感器,当机械爪对车架造成的压力到达设定值时,信息被反馈给PLC,PLC便会断开抓取电机的供电。抓取完成后抬升电机得电反转拉紧钢索带着升降板上升,使车架离地;然后PLC给旋转伺服电机供电,电机正转车架每次缓慢旋转15°直到旋转360°停止;最后抬升电机得电,正转缓慢把车架放回地面,抓取、伸缩和抬升电机以不同的速度同时运行返回初始位置。
4 结 论
本文提出一种新型翻转装配机器人,总体设计上由机械部分、控制部分、传感部分共同支撑起了翻转机的骨架,其机械部分主要包括车架和底盘翻转机构、升降机构。通过PLC控制机、红外传感器和伺服电机间的相互协调一步一步地完成翻转机器人的抓取任务、抬升任务和翻转任务。该设备技术可使汽车配件平稳上升,并实现翻转,以满足不同车型、不同角度的加工需求,对车架车体进行夹紧、旋转和升降,可以很好地协助工作人员对车架车体进行装配、拆解以及维修等。并能根据翻转机器人在不同的场合下使用,不断地调整翻转机器人的硬件结构和软件环境,使得翻转机器人在任意角度可以完全受控。
研究结果表明,该翻转机器人可以代替传统翻转机的使用,同时也可以避免锁链吊转车架和地沟作业的风险,只需通过WiFi通信和触控面板的监控以及人为控制便可完成作业,其实用性强,具有重要的理论意义和实际应用价值。但还存在几方面需要完善:
1) 虽然机体采用了镂空的设计结构,对机体进行了轻量化处理,但是机体还是看上去非常笨重;
2) 在翻转机器人抓取车架后进行的抬升过程中,升降板和机械爪受到较大的重量,所以材料的选择非常的重要,既要考虑材料的坚韧性又要考虑成本价格。
参考文献
[1] WANG Jianjian, ZHANG Chenglong, FENG Pingfa, et al. A model for prediction of subsurface damage in rotary ultrasonic face milling of optical K9 glass [J]. International journal of advanced manufacturing technology, 2016(1/4): 27?36.
[2] BERTSCHE E, EHMANN K, MALUKHIN K. An analytical model of rotary ultrasonic milling [J]. International journal of advanced manufacturing technology, 2013, 65(9/12): 1705?1720.
[3] HOU Junwei, LI Xin, LI Changfei, et al. Plasma membrane gp96 enhances invasion and metastatic potential of liver cancer via regulation of uPAR [J]. Molecular oncology, 2015, 9(7): 1312?1323.
[4] LI J, ZHU D L, NIU J F, et al. An economic assessment of astaxanthin production by large scale cultivation of Haematococcus pluvialis [J]. Biotechnology advances, 2011, 29(6): 568?574.
[5] 张烈平,马航,李梦,等.基于PLC和WinCC的柿饼烘干监控系统[J].现代电子技术,2018,41(14):118?121.
[6] 周兰美.基于PLC的球化剂自动计量投入装置设计[J].热加工工艺,2018(13):97?99.
[7] HONG M, PAYANDEH S. Design and planning of a novel modular end?effector for agile assembly [C]// IEEE International Conference on Robotics & Automation. Albuquerque: IEEE, 1997: 106?110.
[8] 陈明智,钱同惠,张仕臻,等.仓储物流机器人集群避障及协同路径规划方法[J].现代电子技术,2019,42(22):174?177.
[9] 韩伟娜,张伟聪,崔少飞.PLC板材火焰切割自动控制系统设计[J].现代电子技术,2019,42(22):44?47.
[10] 高明华,黎强,叶子恒,等.基于Arduino与Processing的悬挂画图机器人的设计[J].现代电子技术,2018,41(24):153?156.
作者简介:杨要恩,女,博士,副教授,研究方向为物联网技术、机器人技术及测试技术等。
