一种多信息级联聚类输电线检测方法
2020-12-27赖尚祥杨忠韩家明张秋雁李弘宸陈聪李捷文
赖尚祥,杨忠,韩家明,张秋雁,李弘宸,陈聪,李捷文
1. 南京航空航天大学 自动化学院,江苏 南京 211106 2. 贵州电网有限责任公司,贵州 贵阳 550000
输电线路通常架设在环境复杂、自然条件多变的野外,由于其大部分暴露于户外环境中,长期受到高温炎热、强降雨以及大雪等恶劣天气的影响,导致输电效率的下降。为确保电力能源的稳定提供[1-2],定期对电网的监测、检查和维护尤为必要。传统的人力巡检方式效率低、成本高且不利于在复杂地形下长时间作业;相较而言,机器人可以提高巡检效率,降低劳动力成本,避免操作风险[3-4]。
树障是输电线路通道存在的一种常见安全隐患,表现为通道内树木不断生长并逐渐接触输电线,进而威胁输电线路的运行安全。针对上述问题,杨忠等[5-6]与南方电网开展合作,设计了一种树障清理空中机器人,可以实现输电线路通道内树障的空中快速清理,解决了传统人工树障清理方式中存在的效率不高和安全风险大的问题。通常情况下,树障清理机器人工作在输电线的下方,为了防止作业时发生撞线事故,需要对在其上方的输电线进行检测。因此,设计一种适合树障清理机器人的输电线检测方法就显得尤为重要。本文为树障清理机器人设计了一种输电线检测方法,为巡线作业机器人的视觉避障提供了预研基础。
基于视觉的输电线检测算法一般分为边缘检测和输电线提取2 个步骤。文献[7]使用形态学算子去除图中的噪声后,运用Canny 边缘检测算法提取线形物体边缘并结合Hough 变换提取输电线。由于Canny 算子对背景噪声非常敏感,无法抑制背景边缘,同时Canny 算子需要人工设定高低阈值,不能适用于所有图像的边缘检测;因此对于不同背景下的输电线图像,该方法取得的效果差别较大。
针对上述问题,文献[8]选用鲁棒性更强的Hessian 矩阵对图像进行边缘检测,而后利用边界搜索和像素条分块方法结合Hough 变换检测输电线。该方法有效避免了大量的预处理步骤,但其仅仅针对输电线从左到右横跨图像的情况进行区域划分。文献[9]通过建立输电线杆塔与输电线的空间相关性,搜索2 个杆塔之间的空间,查找连接输电线。这种方法适用多种走向的电力线检测,但仅适用于包含多个输电线杆塔的图像。
根据上述文献中所遇到的问题,本文提出一种融合直线空间位置分布特征及长度特征的多信息级联聚类筛选输电线算法,首先采用Hessian 矩阵与Hough 变换提取图像中的输电线。从文献[10]的基于粒子滤波的输电线检测方法出发,提出一种多信息级联聚类分析法,对霍夫空间中的直线信息进行无监督聚类分析,筛选需要的输电线边缘,去除干扰线。最终实验表明,本文算法能够有效提取图像中的输电线,具有较强的准确性。无监督级联聚类有效地减少了参数的使用,避免人工设定参数下繁琐的人为调整参数过程,适用于存在不同输电线分布的情况,并且适用于多种背景下输电线不同分布情况的检测,具有更强的鲁棒性。
1 输电线检测算法模型
1.1 输电线特征分析
树障清理机器人需将入侵输电线通道内的树枝切除,这意味着树障清理机器人的工作环境在输电线的下方。如图1 所示,机体需保持与输电线的相对位置,以避免高速旋转的旋翼与输电线发生接触造成重大事故。考虑到作业场景的特殊性,本文采取了自下而上的拍摄角度[11],在观察大量图像的基础上,得到以下输电线图像特征:
1)输电线可以从各个方向贯穿整个图像;
2)输电线在图像中通常为直线,在部分图像中,由于图像畸变以及拍摄方式存在差异,多股输电线在这类图像中的空间位置并不一定完全平行;
3)所收集的输电线图像背景主要为天空、树木以及建筑物。

图1 树障清理空中机器人工作示意
在此基础上,设计算法模型,具体组成如下:
1)针对图像背景复杂多变的问题,本文采用鲁棒性较强的基于Hessian 矩阵的图像增强算法,提取隶属于强边缘的特征;
2)针对边缘检测之后边缘在图像中呈离散式分布这一问题,本文采用Hough 变换对图像进行直线提取,得到图像中直线的参数;
3)针对图像中除去输电线,依然可能包含其他类型线型结构这一问题,本文设计一种多信息级联聚类法提取输电线,其算法流程如图2 所示。
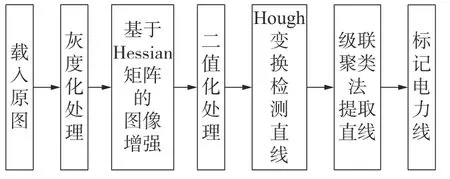
图2 输电线检测算法流程
1.2 图像预处理
为了便于对图像中输电线进行边缘检测以及特征提取,需要进行相关预处理工作。由于RGB图像中包含大量冗余的颜色特征,因此可以通过对输入的图像进行灰度化处理,减少图像整体的数据量。灰度化得到的输电线边缘不是特别明显,因而需要对图像的输电线边缘进行增强。对应于输电线的直线信息都从属于图像中的强边缘,采取基于Hessian 矩阵的图像增强算法[12],将隶属于强边缘的特征提取出来。对于二维Hessian矩阵表示为

式中:f是图像关于坐标(x,y)的函数;fxx、fxy、fyx,、fyy分别代表函数f对x,y及其混合的二阶偏导数。在图像空间中,Hessian 矩阵即为平面中一点的二阶导数,其特征值与特征向量反映了图像灰度曲率变化的强度和方向。
1.3 直线提取
原始图像经过图像预处理和边缘检测之后,得到的二值图像中不仅包含输电线的边缘,还存在大量背景噪声。本文采用Hough 变换直线提取方法检测图像中的输电线。
Hough 变换是一种基于表决原理的参数估计技术。其基本原理是利用图像空间的线和Hough参数空间的点的对偶性,把图像空间中的检测问题转换到参数空间,如图3 所示。对于平面一点(x0,y0)有方程:

式中:r为直线极径; θ为直线极角。任一组参数(r,θ)均代表一条通过点(x0,y0)的直线。对于给定点(x0,y0),在以极径r为纵坐标,极角 θ为横坐标的平面内绘出所有通过它的直线,将得到一条正弦曲线。对于平面内3 个点,则存在3 条正弦曲线,曲线交点所表示的直线即为经过这3 个点的直线。

图3 Hough 空间转换示意
Hough 变换通过设定阈值判断是否存在直线。当超过阈值数量的曲线相交于一点则可被认为检测到一条直线。Hough 变换算法抗噪性能好、拟合精度高,在图像的直线提取中得到了广泛的应用。
1.4 输电线检测
据文中1.3 节对Hough 变换检测直线的原理描述可知,存在一种情况,当线段的交点峰值达到阈值时,系统会自动认定该边缘为直线。如图4所示,由于这种虚假峰值的影响,经Hough 直线提取到的边缘不仅包含了属于输电线的边缘,也含有由背景中树木产生的边缘。观察大量图像可知,输电线在图像中的分布往往比较规律,输电线斜率、长度以及距图像原点距离集中在一个值附近。因此本文考虑使用无需提前设定条件的聚类算法筛选杂线。在本文中将在极坐标系下直线到图像原点的距离称为直线的极径。
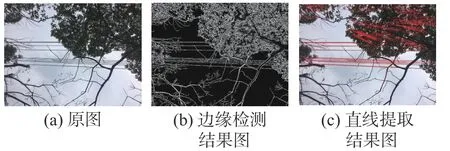
图4 Hough 变换直线提取结果
直线在图像中的主要信息表现为直线的角度及长度,而直线的极径反映了直线在二维图像中的相对位置,融合直线的角度及极径信息可反映直线在图像中的空间位置分布信息。对直线的长度及空间位置分布信息进行聚类分析能够最大限度保留输电线的特征。本文首先对直线的空间位置分布信息进行聚类分析,进而将其与长度聚类进行级联分析。聚类结果如图5 所示,无监督聚类分析最大的问题即为无法得知所得分类结果的标签。对于一幅输电线图像,经Hough 变换得到的直线参数数组中,在投票空间得票越高的直线参数是直线的可能性越大,同时其在存储序列中的优先级也越高。因此,算法程序调用时优先返回的参数为输电线边缘的可能性最大,本文算法据此获得聚分析结果的标签。

图5 聚类分析结果
图6 为对直线进行聚类分析的结果。其中图6(a)为对直线长度信息进行聚类分析的结果。由于仅对直线的长度进行聚类分析,无法去除长度过长且不属于输电线的干扰线。因此由图可见,除却输电线的边缘,存在2 条长度特征相近的干扰线。图6(b)为对直线空间位置分布信息进行聚类分析的结果,即对直线与图像原点距离以及角度进行聚类分析。由图可知,除却输电线的边缘,还包含一条在输电线附近且空间分布近似的干扰线。因此,对直线空间位置信息进行筛选保留了与输电线斜率近似且空间位置相近的直线,然而无法去除空间位置信息与输电线一致且不属于输电线的干扰线。这些干扰线最终将会对输电线检测的准确率产生重大影响。
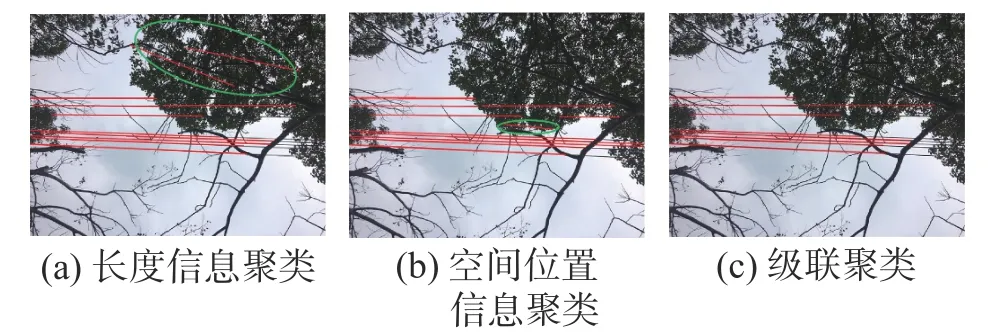
图6 聚类信息比较
为保证直线提取的准确率与鲁棒性,本文提出基于级联聚类法的直线提取算法,能够将上述2 种情况所描述的负样本经过重复筛选去除,提高了检测精度。分别对直线的角度信息及长度信息进行聚类分析之后,根据优先返回的参数判断类别属性。对同属输电线的聚类结果进行多重判断,经过3 次聚类重复验证,确认后则可认为检测到的结果为输电线。图6(c)所示即为经过级联聚类法提取之后的实验结果,图6(a)中的干扰线空间位置分布信息与输电线不一致,图6(b)中的干扰线长度特征与输电线不一致。可知,经重复筛选后,干扰线得到了有效的筛除,与输电线相关的直线被大量保留。
由于Hough 变换虚假峰值的影响,经级联聚类法筛选后得到的直线含有重复检测的问题。针对此问题,需要对不符合要求的重复直线进行筛选。由于部分图像中的直线并不一定完全平行,因此需要对每条直线间的距离进行估算。
观察大量检测图可知,重复线与准确线斜率近似,故可通过计算其中一条线段的多个点至另一条直线的距离,求得平均值后进行估算。2 条斜率近似直线的距离估算公式为

式中:A、B、C为二维直角坐标系中直线一般式的参数;(xi,yi)为其中一条直线的任一点;n为取点数量。通过设定阈值D,当<D时认为存在重复检测问题。
输电线去重复算法流程如下:
1)载入输电线图像及直线参数;
2)估算第一条直线至其他直线间的距离;
3)筛选距离小于阈值的所有直线,最长的一条保留,并删除小于阈值的其他直线;
4)估算第二条直线至其他直线间的距离;
5)重复步骤3)、4),直至最后一条直线计算完毕;
6)将最终得到的直线用矩形框标记。
由于视角原因,本文采用的数据集中输电线部分线段被树木遮蔽,输电线难以直接检出。根据1.1 节输电线的特征分析,得到电力线始终贯穿图像且具有连续性的特点,本文依此特征预测输电线走势,将被遮蔽部分输电线在图中用矩形框标记。实验结果如图7 所示,算法检测得到的输电线通过矩形框进行标记。

图7 直线去重复
2 实验分析
为验证所述方法的有效性,采集了100 组输电线图像,并进行数据集扩充。对基础数据集加入影响灰度变化的高斯噪声,以及进行影响输电线空间位置特征的旋转操作,共得到300 张图片,以此为数据集进行多组实验,并分析算法检测结果。本文设计实验如下:
实验1:改变整体算法框架中的边缘检测算法,验证基于Hessian 矩阵的图像增强算法准确性;
实验2:改变整体算法框架中的直线检测算法,验证基于Hough 变换的直线提取算法的准确性;
实验3:改变整体算法框架中的直线筛选算法,验证基于级联聚类法的直线筛选方法有效性;
实验4:针对不同天气下的输电线路,验证算法在不同光照条件下的鲁棒性。
2.1 基于Hessian 矩阵的图像增强算法准确性验证
为了验证基于Hessian 矩阵的图像增强算法在本文算法架构下的准确性,本文与文献[7]中检测输电线时使用的Canny 边缘检测算法,以及文献[10]中使用的Sobel 边缘检测算法进行对比实验,如图8 所示。不同边缘检测方法对比结果如图9~11 所示。

图8 3 种边缘检测算法
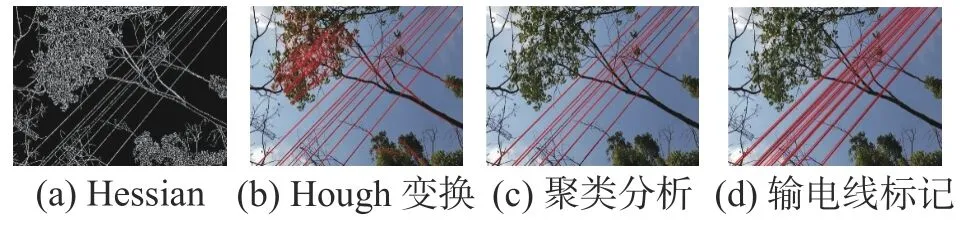
图9 方法1 检测过程及结果
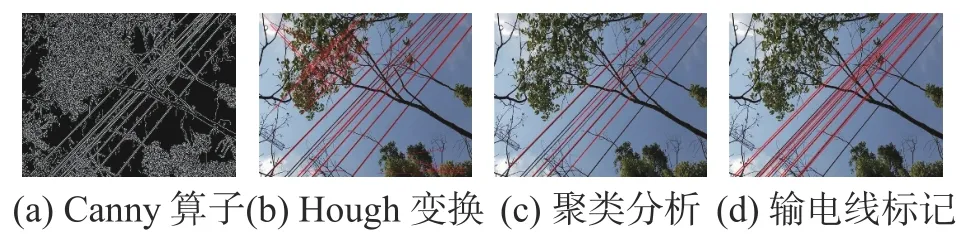
图10 方法2 检测过程及结果
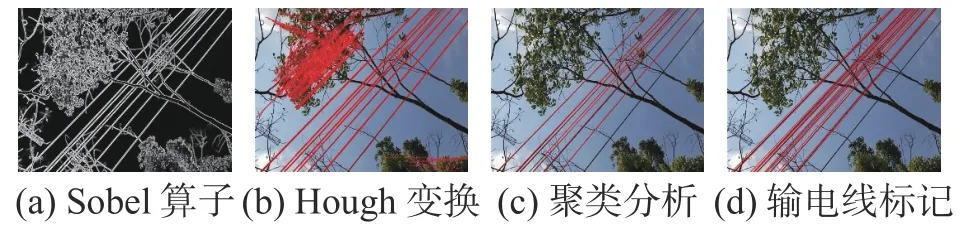
图11 方法3 检测过程及结果
为了定性分析各类方法的实际性能,采用精准率(Precision)及召回率(Recall)2 种指标去衡量每幅图像的检测效果。精准率是检索出的正样本数与检索出的总样本数的比率,衡量的是检索系统的查准率;召回率是检索出的正样本数和所有的正样本数的比率,衡量的是检索系统的查全率。
精准率计算公式为

召回率计算公式为

式中:PT为被检索到的正类;PF为被检索到的负类;NF为未被检索到的正类。由于每幅图像中的输电线数量不同,本文采用文献[13]中的平均精准率以及平均召回率衡量实验结果。
图9~11 中的(d)图分别为采用图8 中方法1、方法2 以及方法3 的运算结果。由图9(a)、图10(a)、图11(a)可知,Canny 算法对噪声非常敏感,边缘检测包含大量无效边缘,且输电线长度特征被部分破坏,不利于下一步的直线检测。Sobel 算子较好地保留了输电线的特征,同时边缘被放大,以致图中最右侧的输电线的长度特征被树枝切断,不利于下一步的直线检测。在输电线间距过近时,由于经过Sobel 算子边缘检测输电线得到2 条具有明显特征的边缘,使得多条输电线的边缘重合,不利于最终直线筛选。而使用基于Hessian 矩阵的图像增强算法能够在保留输电线完整边缘特征的前提下,产生更少的不必要边缘。由图10(c)、(d)可知,经过级联聚类筛选直线,Canny 算法遗失了3 条输电线,这对输电线检测产生的影响是无法挽回的。由于Sobel 算法检测到的树枝边缘过大,以致遗失部分输电线的长度信息。图9~11 中的(d)图使用矩形框标记最终检测到的输电线。可知方法1PT=8、PF=0、NF=0 时,精准率为100%,召回率为100%。方法2PT=5、PF=0、NF=3 时,精准率为100%,召回率为62.50%。方法3PT=7、PF=0、NF=1 时,精准率为100%,召回率为87.50%。
2.2 基于Hough 变换的直线提取算法准确性验证
为了验证Hough 变换在本文算法结构下的准确性,对比了文献[14]、[15]中使用的LSD 直线提取算法,如图12 所示。不同直线提取方法对比结果如图13、14 所示。
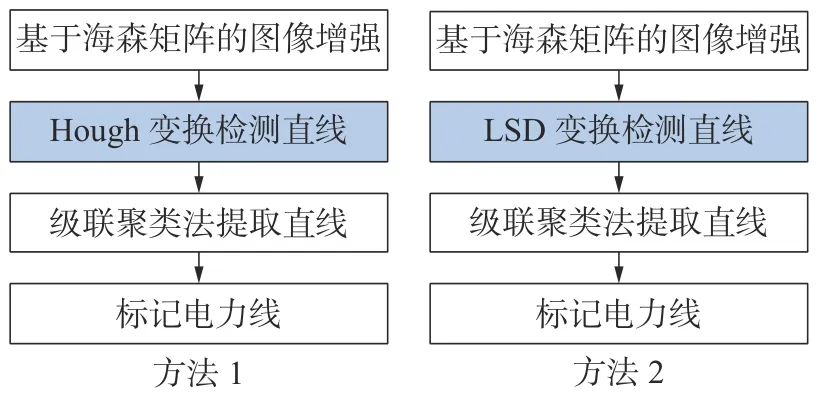
图12 2 种直线提取算法
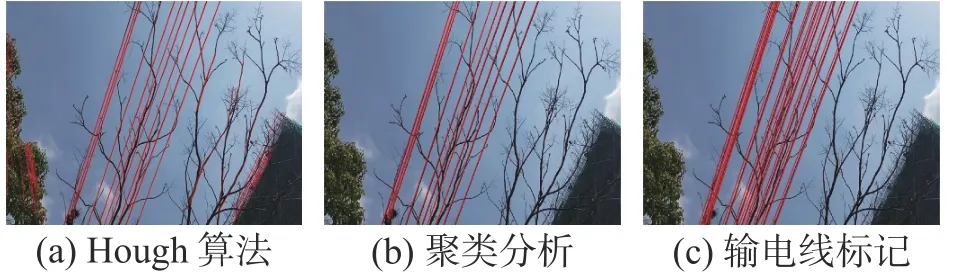
图13 直线提取方法1 过程及结果

图14 直线提取方法2 过程及结果
图13、14 中的(c)图分别为采用图12 中方法1 以及方法2 的运算结果。观察图14(a),图像经LSD 算法提取直线,在树枝分叉处产生大量不属于输电线的干扰线,同时输电线被分割为大量短线段。由于LSD 是一种局部提取直线的算法,对于直线相交情况,设置了每个点是否被使用,因此每个点只能属于一条直线,若有相交必有至少一条直线被割裂为2 条。又因为其算法原理基于梯度,直线交点梯度值往往又较小,因此很有可能相交的2 条直线在交点处被割裂为4 条线段。由于局部提取算法自增长的特点,对于长线段被遮挡、局部模糊等原因经常割裂为多条直线。因此使用LSD 算法提取直线将会得到大量断线,输电线的长度特征相比于干扰线则变得模糊,不利于后续使用级联聚类法对直线的筛选工作。而Hough 变换直线提取算法则不存在这种情况。
由图13、14 中的(b)图可知,经级联聚类直线筛选之后,使用方法一的输电线特征被全部保留,而方法二则产生了3 条不属于输电线的干扰线,以及遗失一根输电线。图13、14 中的(c)图为最终结果,使用矩形框标记。统计可知,方法一的识别结果为PT=10、PF=0、NF=0,精准率为100%,召回率为100%。方法二的识别结果为PT=10、PF=6、NF=4,精准率为62.50%,召回率为71.43%。
2.3 基于级联聚类法的直线筛选方法有效性验证
为了验证我们提出的基于级联聚类法的直线筛选方法的有效性,对比了对不同信息聚类分析的直线筛选方法,如图15 所示。不同聚类方法对比如图16 所示。图16(a)、(b)、(c)分别为采用图15 中方法一、方法二以及方法三的运算结果。

图15 3 种聚类方法对比实验设计

图16 不同聚类方法对比实验
图16(a)为级联聚类法筛选直线得到的结果,由图可知,该场景下输电线特征被完全捕捉,同时不存在漏检、误检的情况;由图16(b)可知,仅对长度信息进行聚类,输电线被完全保留,但是存在3 条长度与输电线相近的干扰线无法筛除,即PT=10、PF=3、NF=0;图16(c)中仅对空间位置信息进行聚类,得到指标PT=10、PF=1、NF=0,10 根输电线均被检出,但存在一条与输电线空间分布相似的杂线未被筛除;图16(d)为对图像进行去重复,将最终得到的输电线用矩形框标记。
图17 为多信息级联聚类输电线检测算法效果展示。表1 为其长度信息、角度信息、位置信息的聚类中心。
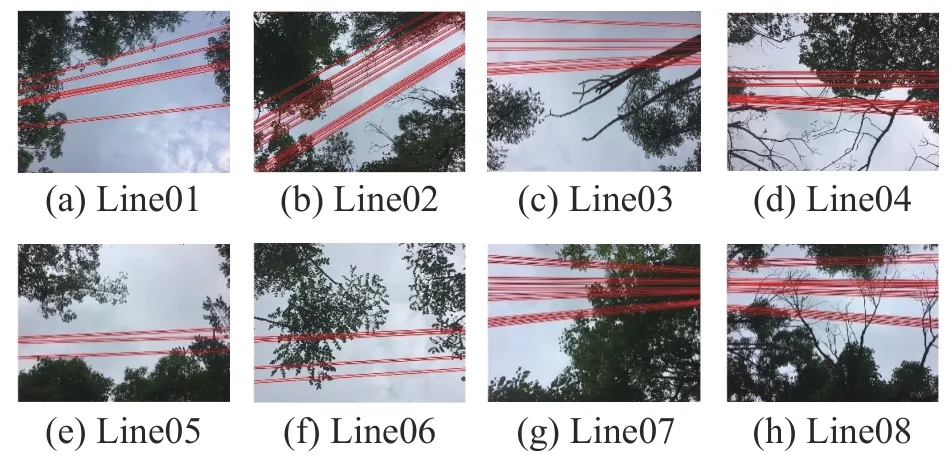
图17 直线检测效果展示

表1 聚类中心数据
2.4 不同环境因素下的算法鲁棒性验证
图像类算法在实际应用中总是受到光线条件的影响,考虑到本文载体树障清理空中机器人的作业时间,基本不会出现光线昏暗的情况。但空中机器人在不同的天气下均需要顺利进行作业,因此本文算法应保证在不同天气下的算法有效性。本次实验对比了在不同天气情况下实验结果,如图18、19 所示。采用的数据集包含了100张阴天获取的图像以及100 张晴天获取的图像。由图18、19 可知,由于本文算法的高鲁棒性,使得其在不同天气条件下,均能够有效地检测出输电线所在位置。

图18 阴天直线检测效果
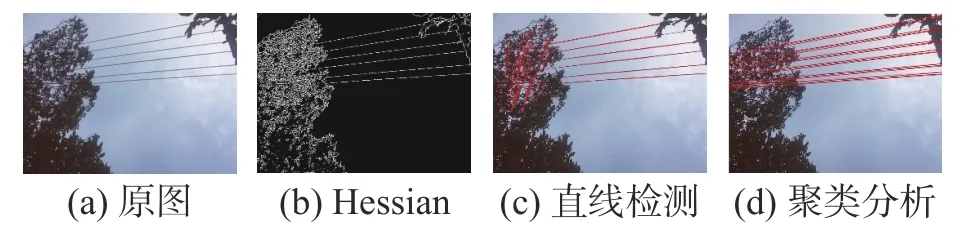
图19 晴天直线检测效果
图像背景也是影响算法有效性的重要因素之一。虽然本文由树障清理空中机器人作业平台为研究出发点,但依然在复杂背景条件下进行了实验。本次实验采用由上而下拍摄的常见输电线路巡检图像,如图20 所示。该场景具备房屋、杂草、耕地等复杂干扰。相较于自下而上拍摄的图像,该类图像中往往包含了大量的干扰及更多规则的线状特征。然而这些线状特征与输电线是毫无联系的,因此通过对直线的长度、角度及位置信息进行聚类分析,能够适应更多复杂环境下的输电线检测,具有较强的鲁棒性。如图20(d)所示,图中6 根电力线均被检出。同时本文展示了8 张在其他类型复杂背景下的检测结果,如图21所示。表2 为其长度信息、角度信息、位置信息的聚类中心。图21(a)、(b)背景为枯草,(c)、(d)背景为荒地,(e)、(f)、(g)、(h)背景为绿植。在所示背景下,本文算法均取得了一定的效果。
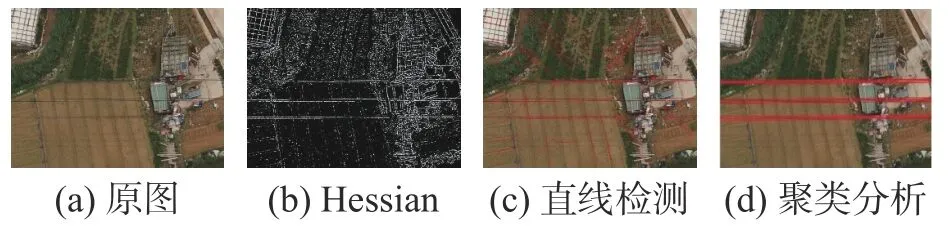
图20 复杂背景下图像及检测结果

图21 不同复杂背景条件检测结果展示

表2 复杂背景条件下聚类中心数据
2.5 实验结果
为定量分析所有影响本文算法的因素,验证算法的鲁棒性,对上述3 种实验,在一个包含300 张输电线图像的数据库中进行测试,并统计结果。
在边缘检测算法对比结果中,方法1 精确率为90.63%,召回率为90.33%;方法2 精确率为88.43%,召回率为67.96%;方法3 精确率为83.52%,召回率为71.83%。方法1 相较于其他2 种方式有明显优势,Canny 算子对输电线进行边缘检测常出现断线,不利于最终的输电线检测,因此精确率、召回率均较低。Sobel 算子检测到的直线边缘特征被放大,双边缘在输电线之间距离过近时表现不佳。
在直线提取算法对比结果中,方法1 精确率为90.63%,召回率为90.33%;方法2 精确率为78.35%,召回率为84.59%。LSD 直线提取算法对图像中的微小线段过于敏感,同时提取到的直线大多为短线,输电线在这种情况下长度特征不明显,不易于将其与干扰线进行区分。
在聚类算法对比中,方法1 精确率为90.63%,召回率为90.33%;方法2 精确率为71.57%,召回率为93.59%;方法3 精确率为83.34%,召回率为92.71%。可知,方法2 以及方法3 的聚类方式保留了绝大部分直线特征,算法召回率大于级联聚类直线筛选方法,但其去除不属于输电线的干扰线的性能不如级联聚类法,级联聚类法在牺牲微弱的查全能力的同时,一定程度上提升了算法的查准率。相较于其他两者,本文算法在综合直线多特征信息的基础上,大大提升了算法的鲁棒性,使得其适用于大多数场景下的检测需求。
本文算法在不同天气情况下对比结果如图22所示,两者相差无几。说明在不同天气情况下,本文算法均能够发挥其效力,具有一定的鲁棒性。

图22 阴晴实验对比
3 结论
本文针对树障清理机器人实际工作场景,提出了融合直线空间位置分布特征及长度特征级联聚类法的输电线筛选方法。
1)采用基于Hessian 矩阵的边缘增强算法进行图像预处理,采用Hough 进行直线检测。通过多信息级联聚类分析,将图像由宏观特征引入微观。在常规采集条件下,能够获得的输电线特征并不稳定。在自然环境下,与输电线特征相似的线结构较多,在观察其局部特征之后,可发现对直线的长度、角度及位置规律进行描述,可以有效区分输电线与干扰线。通过对这一规律的数学化,能够有效检测输电线。
2)经实验论证,本文方法具有较高的鲁棒性与准确性,且在检测出输电线的同时能够依据输电线的走势,预测被遮蔽部分输电线的相对位置。
本研究成果还可以用于非接触式输电线路巡线作业机器人的沿输电线路导航研究。
