基于面向对象的建筑物信息提取方法研究
2020-12-25贺晓璐刘振华胡月明
贺晓璐,刘振华,胡月明,5,6
(1.华南农业大学 资源环境学院,广东 广州 510642;2.国土资源部建设用地再开发重点实验室,广东 广州 510642;3.广东省土地利用与整治重点实验室,广东 广州 510642;4.广东省土地信息工程技术研究中心,广东 广州 510642;5.青海大学 农牧学院,青海 西宁 810016;6.电子科技大学 资源与环境学院,四川 成都 610054)
0 引 言
随着城镇建设的发展,城市化水平不断提高,城市建设用地面积呈高位增长态势。建设用地的扩大,对社会和生态环境造成了一定的影响[1]。而建筑物作为建设用地中最重要的目标地物,对其进行信息提取和精确识别是城市遥感研究中的热点问题。建筑物的快速获取一方面有助于城市管理者对城市进行管理和规划、生产布局以及城市三维建模等;另一方面对土地资源的保护和可持续利用也具有重要的意义[2]。
目前建筑物的提取方法主要有3种[3]:一是基于几何边界的提取方法,主要通过检测建筑物的分段线获得建筑物边缘轮廓信息,进而实现建筑物的信息提取。如WANG J等[4]通过增强建筑物边缘对比度,采用EDLines分段检测器提取建筑线分段,将检测的线段按层次分组到候选矩形建筑中,使用线连接和闭合轮廓搜索的方法进行矩形建筑物的自动提取;吴炜等[5]利用建筑物的光谱特征和形状特征相结合构造建筑物模板,对建筑区域进行识别,最后对检测出的建筑物边缘进行细化,完成建筑物的自动提取;张浩等[6]通过改进支持向量机算法模型参数对建筑物分类结果进行边缘特征的提取,分类精度高达90%。该类方法流程化程度高,但对于大范围和建筑物形状复杂的区域提取效果不佳,且先验模型不具有较强的移植性,缺少通用的算法。二是基于图像分割的方法,图像分割是将遥感影像分成多个具有不同特性的多边形区域[7]。由于不同的地物最优分割尺度不一,在建筑物提取前需对影像进行多尺度分割[8-11]。如党涛[12]对中卫市影像图进行多尺度分割,利用小尺度获取不透水面结果图,然后在大尺度影像中进一步提取建筑物信息。然而,此方法对不同地物所适应的分割尺度没有一个较好的标准,同时对分割结果缺少评价体系。三是基于辅助信息的方法,利用阴影和DEM(digital elevation model)、DSM、LIDAR(light detection and ranging)等高度数据的辅助,进行建筑物的提取[13-14]。F.Lafarge等[15]通过标记点过程的方法实现建筑物足迹的粗略逼近,用矩形对建筑物足迹进行建模,然后改进相邻矩形之间的连接,将高度不连续的矩形进行纠正,实现了建筑物的自动提取;曾齐红等[16]使用机载LiDAR点云数据,将提取的建筑物点云进行聚类、屋顶平面拟合、屋顶边界确定,对建筑物进行三维重建,实验结果表明规则的建筑物重建效果较好。但在实际中,辅助信息不一定存在,如南方地区阴影较短,不适合采用阴影法。此外,建筑物的高度数据获取困难。
由上可知,由于城市建筑物环境复杂多样,建筑物的提取存在较大的困难和干扰,目前建筑物的识别方法并没有很好的普适性。因此,本文尝试采用立体像对数据提取城市建筑物DSM,引入worldview 2特有的红色边缘波段(RedEdge)的纹理信息,进行基于规则的面向对象建筑物提取;同时根据训练样本,对研究区进行面向对象的建筑物提取;然后,将基于规则提取的建筑物和基于样本的面向对象提取结果进行结合,完成建筑物的提取。
1 研究区及数据预处理
1.1 研究区概况
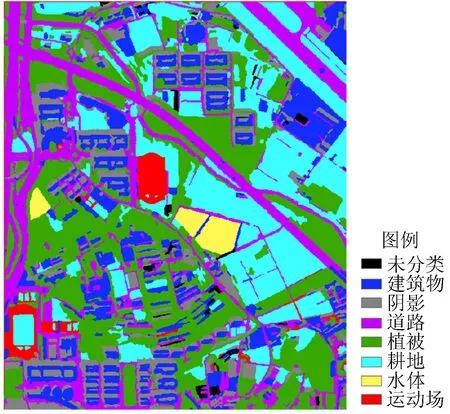
本文以广州市天河区华南农业大学启林校区和泰山校区为主要研究区(113°21′~113°23′E,23°9′~23°10′N),建筑物分布大部分较为规则且密集。北部是启林校区,南部为泰山校区,中部贯穿广州环城高速,东部与岑村旧机场相邻。研究区内包含多种类型建筑物,如三旧改造区域、多层住宅区、教学楼等。建筑物颜色多样,形状复杂多样,有规则的矩形、方形以及不规则图形。研究区概况如图1所示。
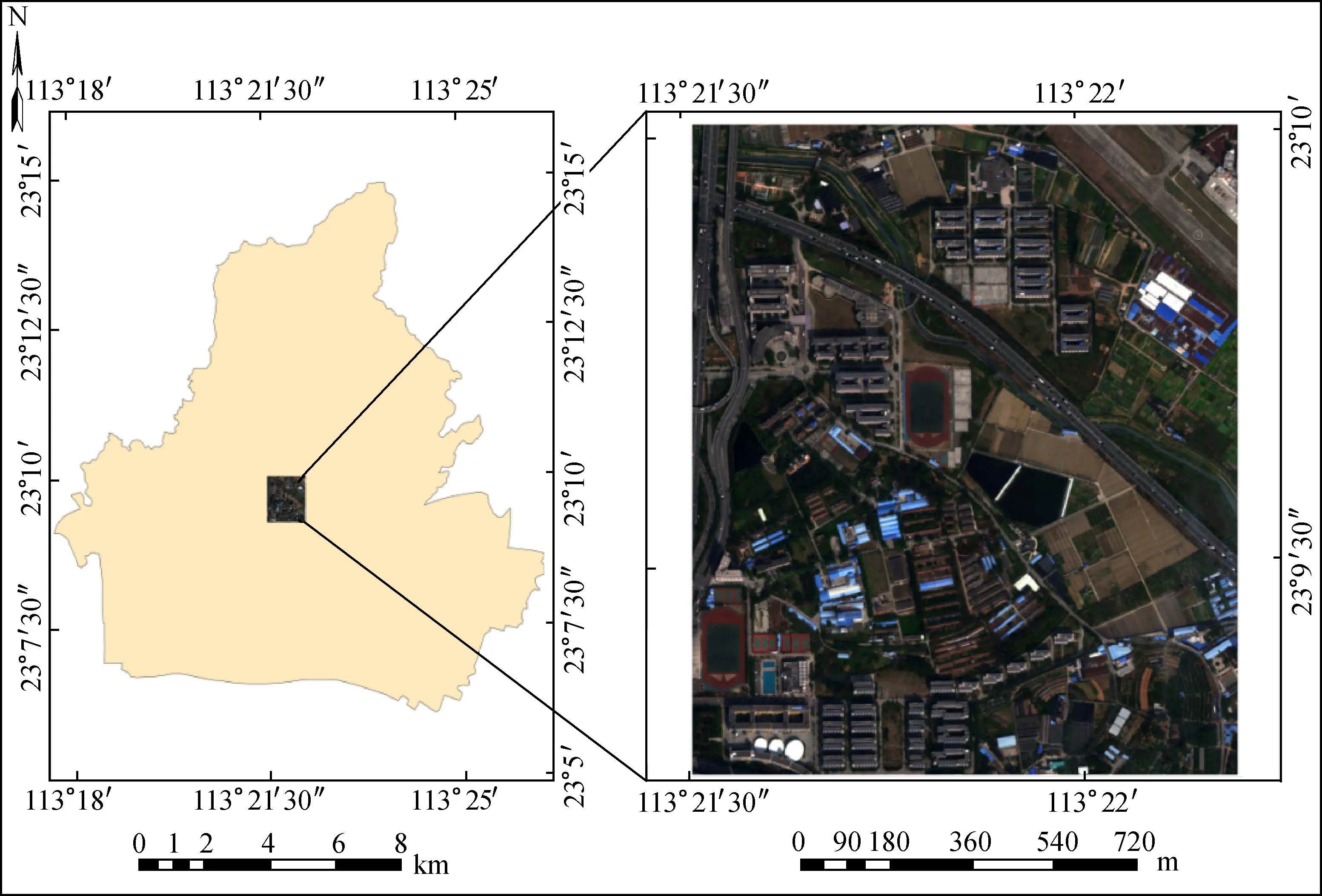
图1 研究区概况Fig.1 Survey of study area
1.2 数据及预处理
采用广州市天河区2013年1月28日的worldview 2单片数据和2013年12月28日的worldview 2立体像对数据,影像包括1.8 m的多光谱数据及0.5 m的全色波段数据。其中多光谱数据除了包含4个常见的波段外(Blue、Green、Red、NIR1),还有4个额外的波段:海岸波段(CoastalBlue)、黄色波段(Yellow)、红色边缘波段(RedEdge)、近红外2波段(NIR2);立体像对数据包括前视和后视影像。本文的预处理包括辐射定标、FLAASH大气校正以及正射校正等。由于worldview2 影像全色波段分辨率较高,而多光谱数据分辨率相对较低,研究采用NNDifuse Pan Sharpening方法对worldview 2数据进行融合,融合前后对比如图2所示。由图2(c)可知,融合后的影像较融合前的真彩色影像具有更高的空间分辨率和对比度。

图2 worldview 2影像融合前后对比图Fig.2 Comparison of worldview 2 images before and after fusion
采用ENVI5.3对立体像对进行DSM提取。选择拍摄角小的前视影像为左影像,后视影像为右影像。选取1 000个连接点,自动预测,在部分无连接点的地区手动添加,使其分布均匀,调整最大Y视差为0.35。因只是辅助建筑物的提取,本文不精确到建筑物的实际高度,所以没选取地面控制点。
为了确认本文提出方法的好坏,收集了地表建筑物实际分布数据,数据来源于广州市城市更新研究院,如图3所示。
2 基于引入红色边缘波段规则的面向对象和基于样本的面向对象相结合的方法
本文提出的基于引入红色边缘波段规则的面向对象提取与基于样本的面向对象分类进行结合的方法:一方面对worldview 2遥感影像数据进行数据融合,基于融合后的影像做尺度分割,根据建筑物的光谱、纹理、形状及高度特征构建规则知识库进行建筑物信息的提取;另一方面将融合后的worldview 2影像进行基于样本的面向对象分类,对分类结果进行筛选,提取出建筑物信息;利用两者单独的提取结果,在ArcGIS里进行建筑物的叠置分析。叠置分析产生的新数据层综合了两者所具有的属性,从而实现了目标地物的最终提取。
2.1 基于引入红色边缘波段规则的面向对象建筑物信息提取
地表建筑物相对复杂,需根据各个地物的光谱特征、形状特征、纹理特征及高度特征信息构建规则知识库的约束条件进行提取。基于规则的面向对象信息提取主要分为2部分:一是影像分割;二是规则知识库的建立。影像分割是特征识别过程中的重要步骤,分割的好坏直接影响建筑物提取的精度。本文选择Full Lambda-Schedule算法对worldview 2融合后的影像进行边缘分割。
Full Lambda-Schedule算法是基于简化的Mumford-Shah模型提出的,基本思想是统筹考虑影像数据中的光谱信息、形状信息和空间信息,对相邻区域的像元集合区域迭代至一定的预设条件,以完成对图像的分割[17]。假设u(x,y)是定义域Ω的图像,K是图像边界,它将图像分成若干个离散的区域,得到分割图像u0(x,y),找出最优的边界,即令方程最小化,

(1)
式中:K为分割的边界集合;φ(K)为边界总长度;Ω为已有图像;g为图像Ω的灰度值;u为图像各子区域的分段近似值常数;λ为分割参数。
Mumford-Shah模型不需要有待分割图像区域的先验知识,可以完全基于图像来完成分割[18]。将Ω看作一个由离散变量i(i=1,2,…,n)索引的像元集合,图像g和它的模型分别由每个像元灰度值g(i)和u(i)表示,分割后得到的区域为图像Ω被边界K分成的子集,K为边界,φ(K)为边界包含的像元总数。式(1)进行离散化为

(2)
对于固定边界K,当u为每个区域的均值时,E(u,K)达到最小,可以假设
(3)
式中:O为整个图像区域,要使式(3)最小,则需使用区域生长的方法;Oi为图像的第i个子区域;ui为该区域所有g的均值;θ(Oi,Oj)为子区域Oi和Oj的公共边长,区域合并式为[19]
E(K,θ(Oi,Oj))-E(K)=
其中,|Oi|为第i个子区域面积,若Oi、Oj满足条件λ≥ti,j时,Oi、Oj需要被合并,ti,j表达式为
(5)

地物的识别需要将阈值调整至最合适的状态。分割尺度过小会导致地物过于破碎,将同一地物分割成多个地块。而分割尺度过大,容易将不同的地物划分在同一类型中,造成分割不完全。通过调整滑块阈值对影像进行分割和合并。经过多次重复试验,当分割阈值为50,合并阈值为90时,建筑物边缘特征分割良好,能较准确地获取建筑物信息。图4为图2(c)红色框影像分割图。
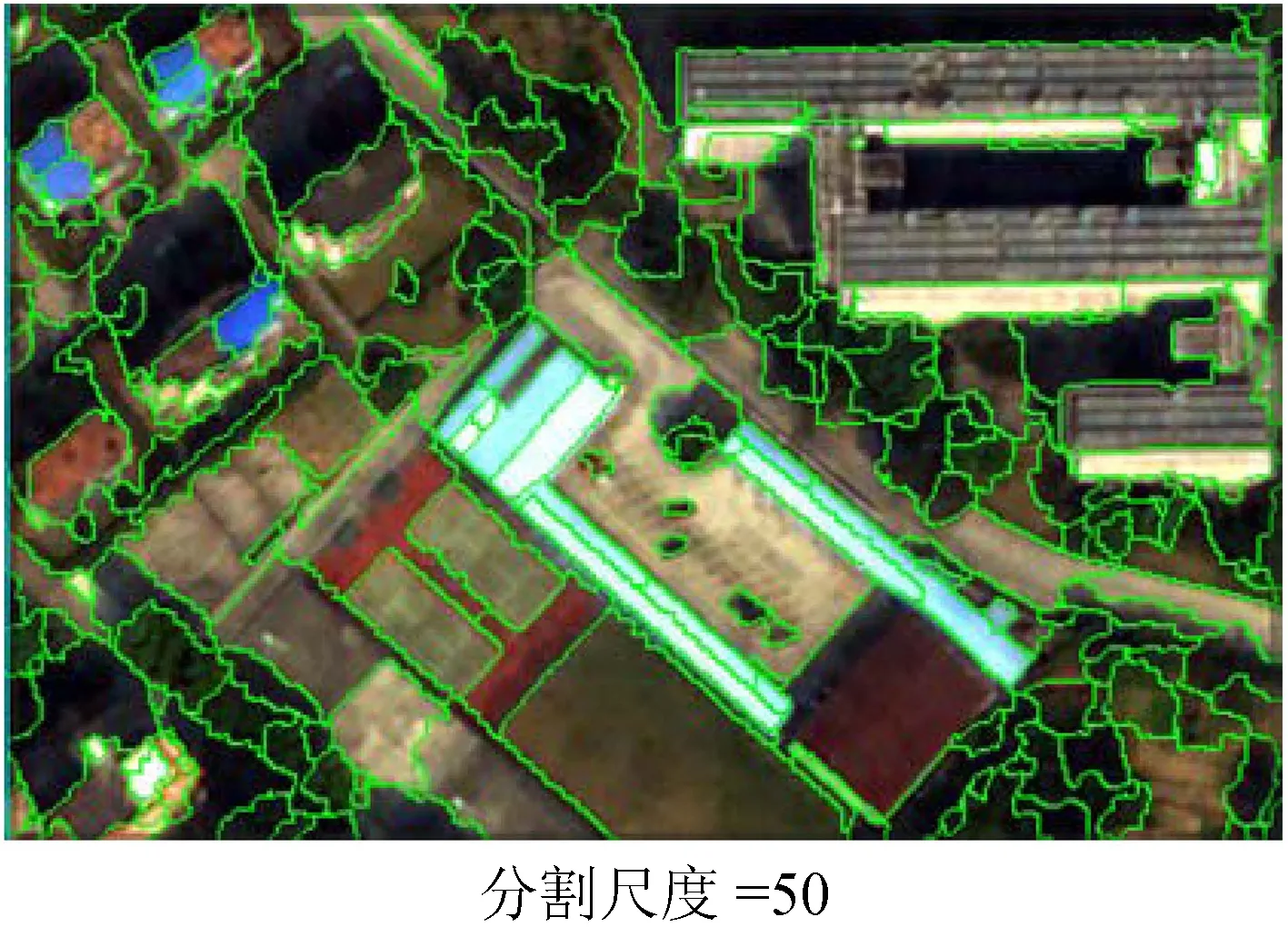
图4 局部影像尺度分割Fig.4 Scale segmentation of local image
在建筑物规则知识库的建立过程中,约束条件和地物属性信息可以是一对多或多对多的关系。建筑物提取必须先排除其他类型的地物,通过建立合适的规则获得较为精确的目标地物。根据实际研究,在直接利用一层规则进行建筑物提取时,部分建筑物会由于反射率过高而被剔除。因此,本文设置了两层规则,在第一层规则提取建筑物信息的基础上,利用第二层规则精细化提取信息。基于规则的面向对象建筑物提取的具体规则如下。
第一层规则:(1)Spectral mean(Normalized Difference)<0.35,Normalized Difference计算的是NDVI值,当该值小于0.35时,为非植被区,大于0.35时,为植被覆盖区。
(2)Rectangular fit>0.35。
(3)Elongation<7.2,约束条件(2)和(3)是排除道路的干扰。建筑物和道路的最大区别是形状不同,建筑物大部分是近乎规则的形状,而道路为狭长的带状。利用Rectangular fit属性和Elongation属性排除道路信息。
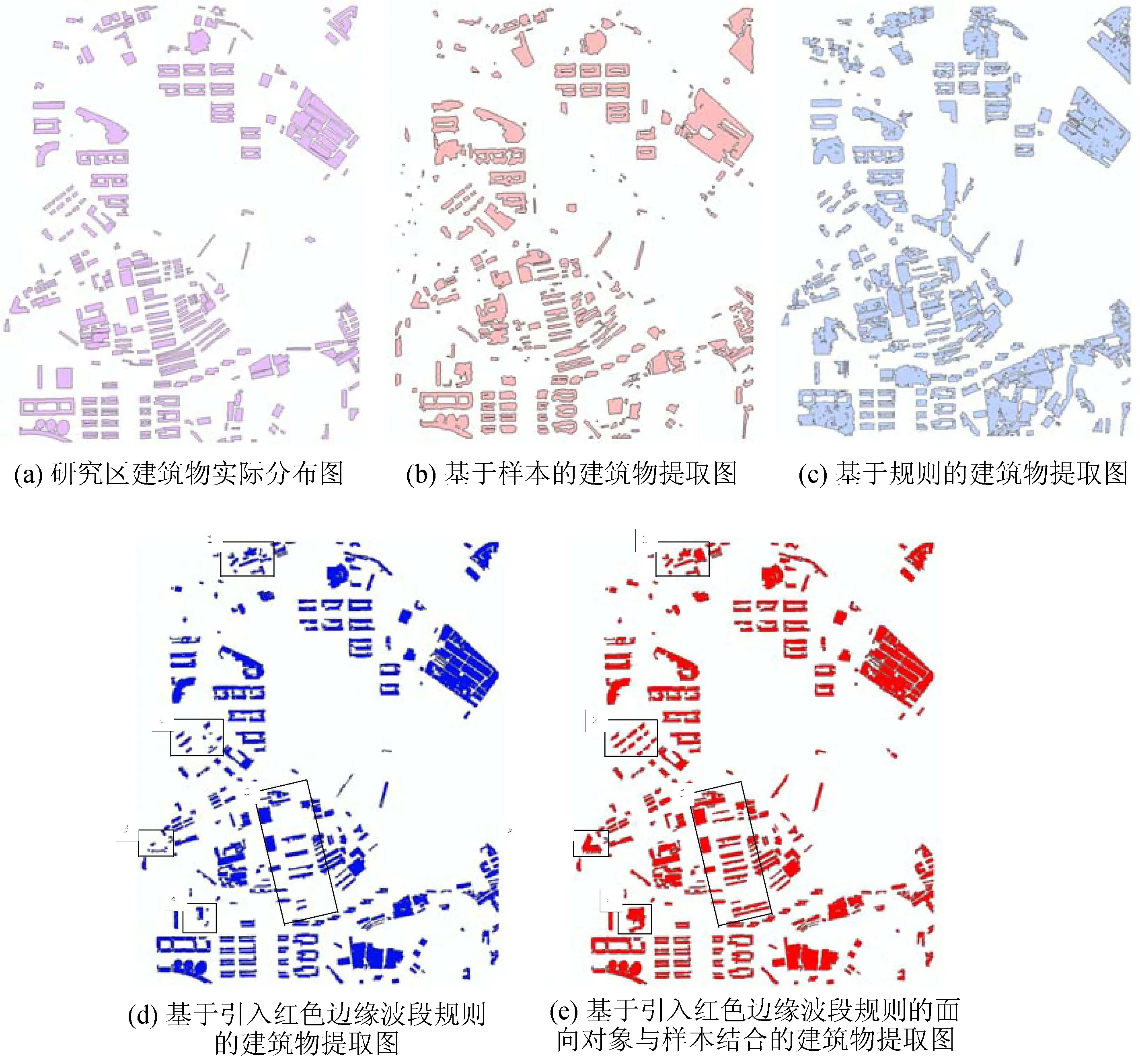
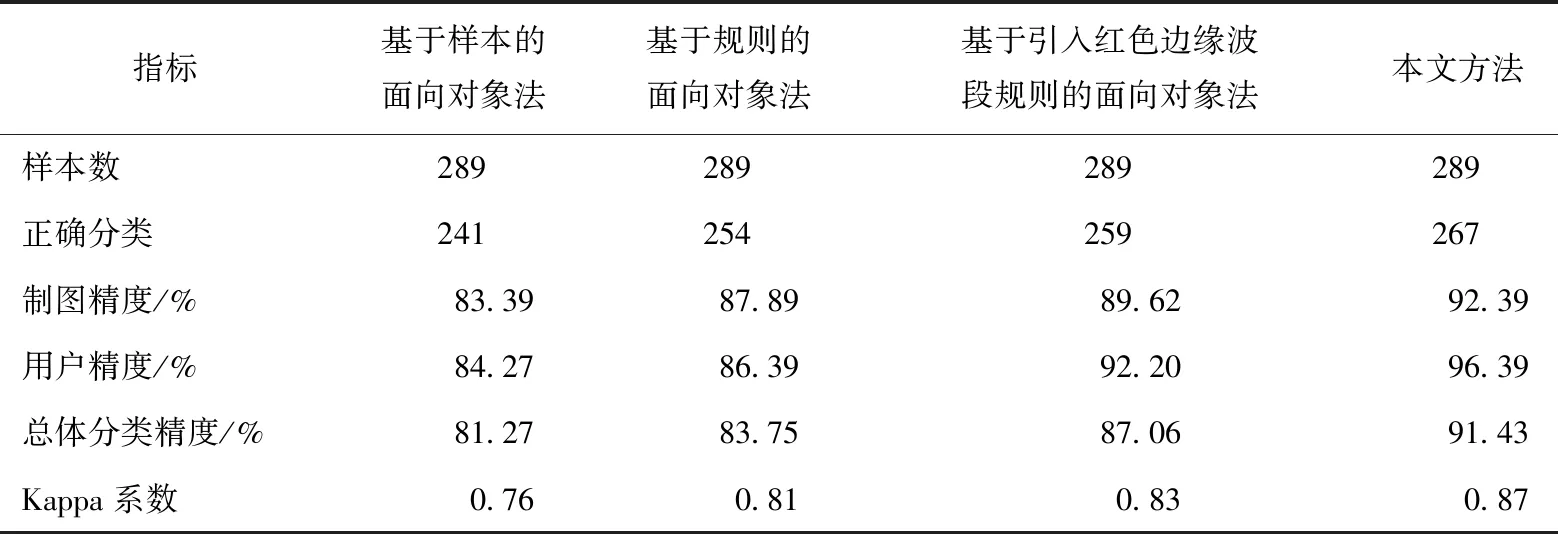
(4)1 400 (5)35 (6)10 第二层规则:2 600 本文提出的基于引入红色边缘波段规则的面向对象建筑物提取是在基于规则的面向对象提取方法的基础上,在第一层规则里加入红色边缘波段的约束条件。因为利用worldview 2的RedEdge波段的纹理信息对种有少量作物的地块和建筑物有较好的区分作用,使用该波段可以去除这些地块对建筑物提取的影响。 基于样本的建筑物提取分为尺度分割、训练样本的选取和分类。其中尺度分割方法如基于规则的面向对象一样,尺度分割和合并的阈值结果也为50和90。根据研究区概况,对尺度分割后影像数据,进行训练样本的选取,本文将地块分为7类:建筑物、植被、道路、耕地、阴影、运动场和水体,选择样本数量分别为100,50,25,25,25,10,2。为了提高建筑物提取的精度,本文选择支持向量机对地物分类,分类概率阈值设置为80,实现面向对象建筑物的提取。 支持向量机(support vector machine,SVM)由V.Vapnik等[20]在1998年提出,是通过监督学习对数据进行分类的一种分类器。它采用结构风险最小化准则,在最小化样本误差的同时缩小模型泛化误差的边界,提高模型的泛化能力,能有效地解决模式识别和函数估计问题[21]。它通过给定具有n个样本的数据集{(x1,y1),…,(xi,yi)},i=1,…,n;其中xi∈Rn,yi∈{-1,1}n;xi是为输入数据,yi为学习目标;来求解最优化问题,计算公式为 Subjecttoyi(wTφ(xi)+b)≥1-ξ,ξ≥0,(6) 式中:w为权重;b为偏置;ξ为正的松弛变量;φ为xi到yi的映射;C为正则化系数。 基于样本的面向对象分类结果如图5所示。 基于样本的面向对象法、基于规则的面向对象法、基于引入红色边缘波段规则的面向对象法以及基于引入红色边缘波段规则与样本结合方法提取的建筑物信息,如图6所示。 通过图6(b)可见,基于样本的分类提取结果与图6(a)结果相比,建筑物轮廓不够清晰,整体呈块状,且有较多碎小的图斑,内部结构也没有很好地勾勒出来。建筑物粘连现象严重,误提取了较多非建筑物信息。但此方法简单,流程化程度高。基于样本的面向对象分类与传统的监督分类一样,需要解译者对遥感图像上的地物类别有一定的先验知识,然后进行样本的选择。分类精度在一定程度上取决于解译者,具有一定程度的主观性。 图5 基于样本的面向对象分类Fig.5 Sample-based object-oriented classification 图6 建筑物提取结果Fig.6 Extraction results of building 基于规则的面向对象提取结果(图6(c))建筑物孔洞较多;对于建筑物密集区域,细节部分提取效果相对较差,呈连片的块状,且建筑物与部分暗色裸地和暗色道路混淆现象严重;独栋建筑物周围伴有许多细小的斑块;提取结果整体较为零乱、呈不规则状态。 基于引入红色边缘波段规则的面向对象提取结果(图6(d))总体相对前两者较好,内部轮廓清晰且抑制了大量的小图斑(主要是道路上的车辆产生的),但部分灰色建筑物和砖红色的屋顶建筑物出现漏提现象,主要以砖红色建筑物漏提偏多。因为在去除裸地时,将部分与裸地光谱信息类似的建筑物剔除,导致提取结果不完整。 本文方法综合了基于样本的面向对象法和基于引入红色边缘波段规则的面向对象法,最终建筑物提取结果如图6(e)所示。对于部分灰色建筑物,基于引入红色边缘波段规则的面向对象提取方法(图6(d))容易与暗色调裸地和沥青路混淆,在规则中被剔除(黑色框1,2,4),而本文使用的融合方法效果较好。从融合方法的结果可见,黑色框5中提取效果有较大改善,原因是建筑物被树木遮挡的情况严重,在进行植被覆盖区与非植被覆盖区的划分时,有部分建筑物被去除,因此在最后的提取结果中导致缺失现象。而黑色框3中建筑物材质跟其他建筑物有较大不同,在影像中颜色与水泥道路相似,反射率较高,所以在基于规则的面向对象中出现漏提。通过与图6(c)的对比可知,本文提出的方法在以上这些方面的提取结果比较理想,基本没有漏提、错提建筑物的现象。相对于基于样本的面向对象提取,本文方法提取的建筑物直观感受较好、轮廓清晰、形状较为规则。 由于本文使用的worldview 2影像分辨率较高,能清晰地看出地物的类型,因此,可通过广州市建筑物矢量化图和目视解译的方法获得地表真实感兴趣区。利用分类结果图和感兴趣区生成混淆矩阵,选择制图精度、用户精度、总体分类精度及Kappa系数作为建筑物信息提取精度评价的4个指标,如表1所示。研究区建筑物的总样本数289,本文方法正确分类数为267,总体分类精度为91.43%,比基于样本的面向对象分类提高了10.16%,Kappa系数高达0.87。总体而言,从总体分类精度和Kappa系数看,分类精度和Kappa系数大小排序为:本文方法>基于引入红色边缘波段规则的面向对象提取方法>基于规则的面向对象提取方法>基于样本的面向对象分类方法。本文方法在一定程度上提高了提取的完整性,同时也减小了错分率和漏分率,在建筑物的提取精度和完整性上,本文方法具有明显的优势。 表1 精度评价Tab.1 Accuracy evaluation 根据本文方法提取的建筑物和研究区建筑物实际分布图,借助ArcGIS软件计算建筑物面积信息。通过两者的面积信息,采用统计分析理论计算建筑物提取的面积偏差[22],公式为 (8) 结合公式(7)和(8),得到结果,如表2所示。 表2 建筑物提取面积偏差Tab.2 Area deviation of Building extraction 由表2可知,建筑物的实际面积比提取面积大902.31 m2,中误差为0.64,说明使用本文方法提取建筑物是可行的。其中,建筑物提取的面积偏差最小值为0.13,表明提取的面积较为准确,效果较好。通过研究区建筑物实际分布图6(a)与本文方法提取结果图6(e)对比可见,部分建筑物与实际分布的结果存在轮廓线不吻合的现象。因为建筑物的提取结果受遥感影像空间分辨率、先验知识以及实验方法等因素的影响。 本文研究了一种从worldview 2高分辨率多光谱全色融合影像上提取建筑物的方法,针对建筑物的光谱、纹理、形状特征信息等,同时考虑城市建筑物的DSM建立约束规则,使用基于引入红色边缘波段规则的面向对象提取与基于样本的面向对象分类进行结合,开展了城市建筑物的识别工作。通过4组对比实验发现,采用本文方法提取的建筑物形状较为规则,轮廓清晰,细节突出,粘连现象也得到了很大改善,可以获得较高的建筑物提取精度。 本文方法也存在一定的不足:一方面,在进行尺度分割时,没有较好的方法确定具体的分割值,因为采用的影像具有较高的分辨率,目标地物清晰,所以本文通过先确定阈值范围,然后在该范围内不断进行试验,并结合目视确定建筑物的最优分割尺度值;另一方面,研究中使用了worldview 2特有的红色边缘波段建立限制条件,具有一定的针对性,而其他的遥感影像没有这个波段,后续研究应尝试使用别的波段替代,进行建筑物的提取研究。此外,本文还引入了立体像对数据提取城市建筑物的DSM,然而辅助数据不一定存在,且获取途径困难。 目前,遥感影像的城市建筑物提取是一项非常重要的工作。本文在提高建筑物信息提取精度方面进行了一些尝试性研究,可为以后学者的研究提供一些借鉴。今后,还需尝试采用其他方法辅助和优化建筑物的自动提取。2.2 基于样本的面向对象建筑物信息提取
3 结果与分析
3.1 建筑物信息提取结果
3.2 精度评价



4 结论与讨论
