基于RSSI 渐变模型的煤矿井下移动节点定位研究*
2020-12-25蔡宗唐
李 锋,蔡宗唐
(广东交通职业技术学院信息学院,广州510650)
1 引 言
目前我国大部分煤矿采用无线射频识别技术对井下人员进行管理,生产人员进入作业区域必须刷卡,只能实现人员考勤,定位精度非常有限。如何对井下人员精确定位,提高人员自我逃生和事后搜救效率,减少事故伤亡,是当前煤矿安全生产研究的热点和重点。
煤矿井下巷道狭长,空间狭小,环境复杂恶劣。无线传感网络电磁波在不同传播路径产生反射、绕射和散射,因此节点接收到的信号不是简单来自单一路径,而是多条路径多个信号的相位叠加[1],从而增强或削减原信号,导致多径衰减[2]。因此井下复杂通道电磁环境往往呈现出较强的区域性和特殊性,对于每个位置而言,其信道多径结构都是唯一的,称为RSSI 信号“指纹”[3]。为此,业界提出基于RADAR模型中的RSSI 算法实现对煤矿井下人员节点的定位。首先遍历井下通道所有节点采样,建立信号指纹特征数据库,再根据目标节点采集到的信号参数代入数据库进行最近匹配,从而计算节点位置。理论上RSSI 算法定位精确,在空旷环境下误差很小,但应用于煤矿井下定位时会受信号多径衰减影响,同时人员节点作业的移动也会对信号产生新的波动和多普勒频移[4-5],若不经处理修正而只是简单地与指纹数据库进行最近匹配,必定会带来误差。
有鉴于此,提出一种煤矿井下基于移动节点的信号衰减渐变模型,根据井下复杂电磁环境下信号多径衰减问题和多普勒频移现象,利用泰勒级数修正影响因子,推导节点移动速率对定位误差的关系和影响,以此建立指纹数据库。但RSSI 算法仅适合对二维平面节点定位[6-7],为精确计算井下移动节点三维坐标并描述运动轨迹,定位时通过指纹数据库匹配找出其邻居锚节点位置和距离,与之组合成立体球体。穷尽所有组合,计算球体交集区域质心即可求解人员节点坐标向量。
2 修正渐变模型
2.1 渐变模型
文献[8]指出,移动节点位置和速率对周围信号会产生信号波动与多普勒频移,其影响是一个渐变的过程,并非RADAR 模型中的线性关系。即信号各个参量会以某种概率影响其他锚节点的指纹参数,从而影响定位精度,具体表现为:设M 为目标节点,距离d 处有一锚节点n,其接收到的信号强度是节点移动速率、载波频率、衰减因子和影响概率构成的复杂函数,如下式:

其中,RSSI 是节点n 接收到的信号参量,f 是信号频率,d 为实测距离,v为移动速率,Pn是目标移动节点M 对锚节点n 信号波动的影响概率,Q 为修正参数。
2.2 泰勒级数修正
泰勒级数属于递归调用算法[9-10]。对于公式(1)中影响概率Pn业界有详细定义标准[11],若能推导出修正参数Q 与影响概率Pn之间的关系,则能根据渐变模型建立动态指纹数据库,从而提高定位精度。此处,通过指纹参数、新模型估算的距离长度与实测距离偏差三个参数迭代校正概率影响参数Q, 直至误差小于指定阈值ε,结束递归调用,算法收敛。
设目标节点M 测得其到k 个邻居锚节点参考距离分别为d1,d2,…dk,速率分别为v1,v2,…vk,以M(x,y)表示目标节点初始位置,f(x,y)表示目标节点M 到周围锚节点距离为di的距离差值,根据极大似然估计法,有:

将式(2)中距离目标节点M 处的节点(x,y)及其初始距离M(xd,yd)和初始速率V(xv,yv)利用泰勒级数展开并舍去高次项以降低算法复杂度,得到:

将式(3)转换为矩阵运算形式“A·△=B ”,其中:
利用参数Q 修正移动速率v 对概率Pn造成的影响,以此对A·△=B 做加权矩阵修正:
求线性方程 A·△=Q·B 的解,即:△=A-1·Q·B,令:
3 动态指纹数据库的建立
信号经泰勒级数修正后,文章将移动节点信号参数转变为概率事件,以此建立井下动态指纹数据库,步骤如下:
1)在煤矿井下通道部署k 个传感节点,Cn是第n 采样点处第k 个锚节点采集的相位叠加信号个数。设C 是样本n 采集的次数,PCk是样本测得来自AP,k且 NRSSI值等于 NRSSICk的概率,计算 PCk概率为:

式中分子部分为相同样本经采集C 次后,其相位信号强度值为“NRSSICk”出现的次数。
2)根据式(9)统计井下通道样本相位为“NRSSICk”出现的概率,建立概率分布直方图,形成RSSI 指纹参数。若第k 个锚节点收到来自i 个不同相位信号源叠加的衰减信号,其指纹概率直方图见图1。
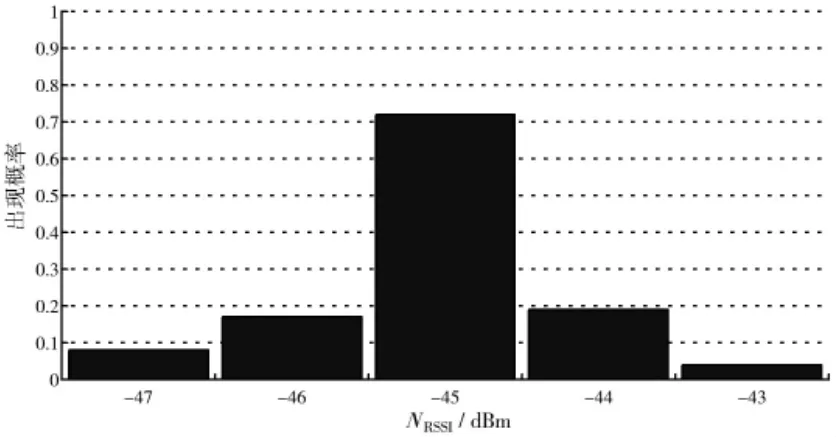
图1 RSSI 概率直方图
3)根据概率直方图,将位置为Lx、实测信号叠加强度向量为“NRSSIx”的节点,依据贝叶斯公式将其转换为指纹参数值,建立井下指纹数据库,如下式:
4 基于球体质心定位的算法
4.1 质心定位
每个锚节点都以自己为球心,根据井下指纹数据库最近匹配原则找出其邻居锚节点向量和之间距离,构成立体球体。穷尽所有组合,计算球体交集区域质心定位目标节点坐标,见图2。
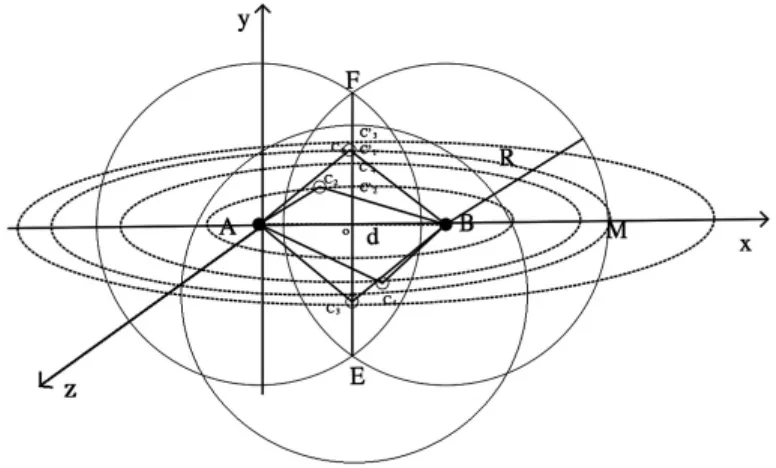
图2 基于球体质心定位原理图
通过计算所有球体交集区域质心,人员节点坐标可表示为:

4.2 误差分析
将 n 分别代入 n 和 n-1 项,计算 n-(n-1)项有:

则目标节点M 的平均定位误差为:
5 系统部署与实验测试
煤矿井下无线传感网络定位系统由定位服务器、传感节点、定位终端三部分组成[12]。定位服务器集成定位算法程序和指纹数据库,负责井上定位系统的管理与控制。传感节点固定在井下通道墙壁,利用交换机连接至控制系统。煤矿定位系统部署的结构如图3 所示。
5.1 环境拟合曲线测试
测试环境选用在真实煤矿井下通道部署90 个锚节点,限制人员节点移动速率v0∈[0,9],测试信号多径衰减和人员移动对RSSI 指纹特征参数影响,所得数据在MATLAB 平台上拟合,结果如图4。
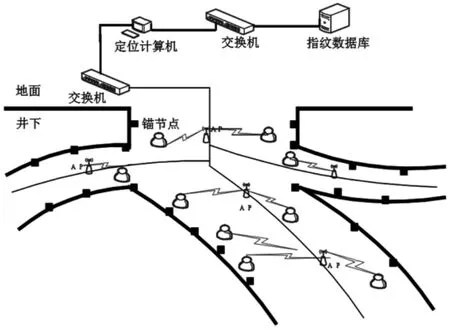
图3 煤矿定位系统部署结构图
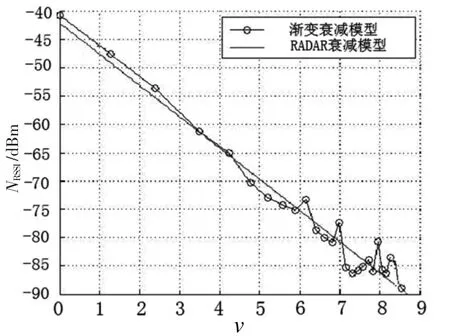
图4 环境拟合曲线图
从图可知,井下人员节点移动速率较小时,渐变模型环境参数拟合曲线与空旷环境下RADAR 模型非常接近;当节点移动速率大于4 m/s 时,节点移动对周围信号产生较大波动和多普勒频移,经泰勒级数反复修正后数据起伏较大,曲线抖动明显。
5.2 动态节点定位偏差测试
移动节点定位偏差的测试结果如图5。两种算法定位偏差都随网络锚节点密度增加而逐渐减小,符合定位共性规律。由于RSSI 算法易受干扰,并非RADAR 模型中简单的线性关系,在井下复杂电磁环境下定位偏差较大,波形起伏也较大。新算法考虑节点移动对周围信号波动和多普勒频移的影响,利用泰勒级数修正RADAR 模型,平均定位偏差比传统RSSI 算法低约14.2%。
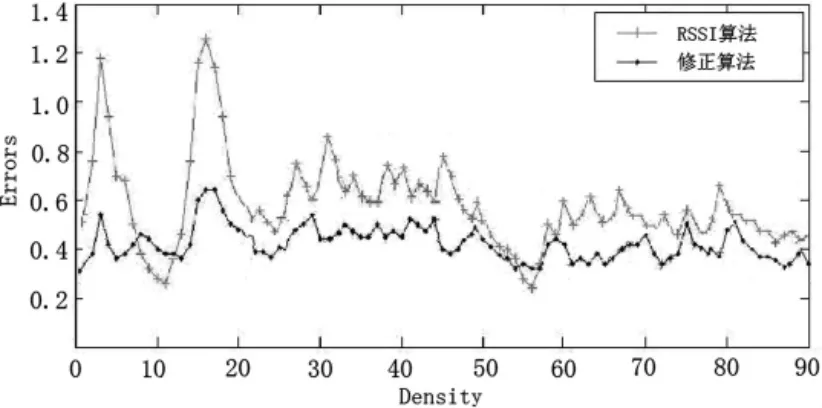
图5 移动节点定位偏差图
6 结束语
煤矿井下电磁环境复杂多变,移动节点位置和速率对周围信号波动与多普勒频移影响是一个渐变的过程。提出的基于RSSI 信号衰减的渐变模型,可根据信号多径衰减和多普勒频移现象,利用泰勒级数反复修正,有效弥补RSSI 易受环境干扰的不足。算法相对复杂,但定位精确,满足工程需求。
