超短基线水声定位系统动态定位误差测试研究
2020-12-25胡圣航闵小龙
胡圣航,闵小龙
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
超短基线(USBL)水声定位系统由于安装简单并且使用方便,是目前水下声学定位的主流设备[1-3]。超短基线水声定位系统的静态定位误差可以很方便地在消声水池或湖泊中进行精确测量,同时也可看到有较多的研究和试验成果[4-9],但鲜见对其动态定位误差的相关研究和试验。水下航行器搭载超短基线水声定位系统进行动态作业时,其实时位置是操作者关注的一个重点,因此研究超短基线水声定位系统的动态定位误差测试评估方法十分必要。根据水下测量定位计量检测系统研究的要求,开展超短基线水下定位系统定位动态定位性能测试技术研究,评判超短基线水下定位系统的动态定位精度,对水下定位系统校准/标定方法的研究具有重要意义。
1 超短基线水声定位系统的原理及组成
超短基线水声定位系统一般由声基阵和声信标组成。声基阵集成了发射换能器和多个接收阵元,其通常安装在船上,发射换能器向水体中发射询问信号并接收响应信号,往往是半球形或无指向性的。声信标放置在海底或安装在水下移动载体上,只有在收到询问信号时才返回响应信号。解算单元根据声基阵接收阵元收到的询问信号和响应信号之间的时间差测出声基阵与水下目标之间的距离,同时利用响应信号到达声基阵各阵元的相位差,测出水下目标相对于阵元的方位,从而得到水下目标的空间位置。
2 动态定位误差测试试验构思
定位误差分析需要分别获取测量值和真实值,然后通过两组数据比对计算得到动态误差。
试验中可以将超短基线水声定位系统输出的声学应答器实时位置作为测量值,取定位精度高于超短基线水声定位系统定位精度的系统输出结果作为真实值。
消声水池高精度行走机构、基于全球导航卫星系统的载波相位差分(GNSS-RTK)测量等均可提供精度高于超短基线水声定位系统动态定位精度的定位结果,但不同的方法有各自不同的使用范围[10-13]。本文将以超短基线声学定位惯性导航系统(GAPS)作为被测设备,采用 GNSS-RTK测量的方法获取真实值,研究超短基线水声定位系统动态定位误差。该方法非常适合在没有消声水池的条件下,对超短基线水声定位系统动态定位误差进行快速评估。GNSS-RTK测量是GPS载波相位测量技术和通信技术的结合,其动态精度可达cm级,在定位精度和实时性方面可以很好地满足要求[14-16]。
3 动态定位误差分析
本文对 GAPS的动态定位精度评估采用比较通用的圆概率误差评定法[17-20]。此方法根据概率为P时圆概率误差半径Rp的大小来评定[21]。
将第i次的GAPS输出的声基阵纬度、经度分别记为φin和λin。为方便进行数据处理,需将声基阵的World Geodetic System-1984世界大地测量系统(WGS84)经纬度坐标(φin,λin)转换为平面坐标(Ein,Nin)。转化方法如下:
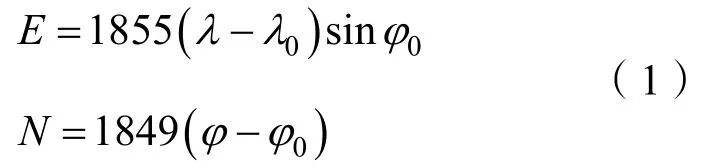
式中:E为平面直角坐标系东向坐标,m;N为平面直角坐标系北向坐标,m;φ为 WGS84坐标纬度值,’;λ为 WGS84坐标经度值,’;φ0为参考基准纬度值,’;λ0为参考基准经度值,’。其中:λ和λ0东为正,西为负;φ0北纬为正,南纬为负。对于本例中λ0和φ0取声基阵经纬度坐标第1组值。
定义 GAPS定位结果的东向坐标误差均值为μE,北向坐标误差均值为μN。
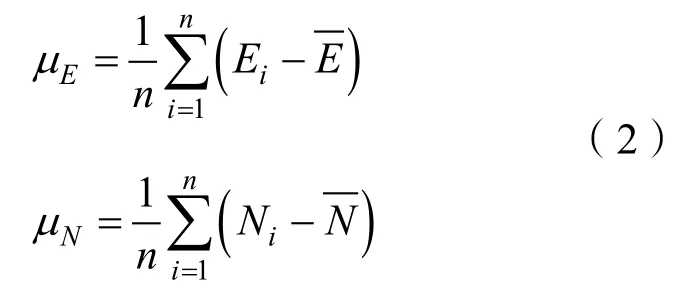
式中:μE为GAPS的东向坐标误差均值,m;n为GAPS定位结果总组数;i为GAPS定位结果此序号;Ei为GAPS第i次定位结果东向坐标,m;为RTK或捷联惯导目标位置东向坐标,m;μN为GAPS的北向坐标误差均值,m;Ni为GAPS第i次定位结果北向坐标,m;为 RTK或捷联惯导目标位置北向坐标,m。
定义GAPS定位结果的东向坐标方差为σE,北向坐标方差为σN。
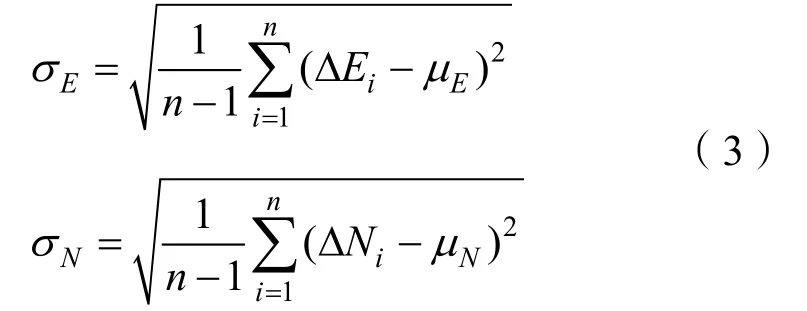
式中:σE为GAPS定位结果的东向坐标方差,m;σN为 GAPS定位结果的北向坐标方差,m;n为GAPS定位结果总组数;i为GAPS定位结果此序号;ΔEi为GAPS第i次定位结果东向坐标误差,m,表达式为 ΔEi=Ei-; ΔNi为GAPS第i次定位结果北向坐标误差,m,表达式为 ΔNi=Ni-。
在概率为P的条件下,圆概率误差半径RP的计算方法为
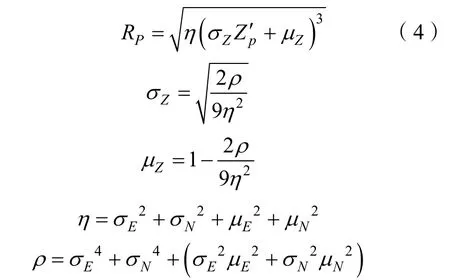
式中:RP为圆概率误差半径;σZ、μZ、η、ρ为圆概率半径计算中间数据。
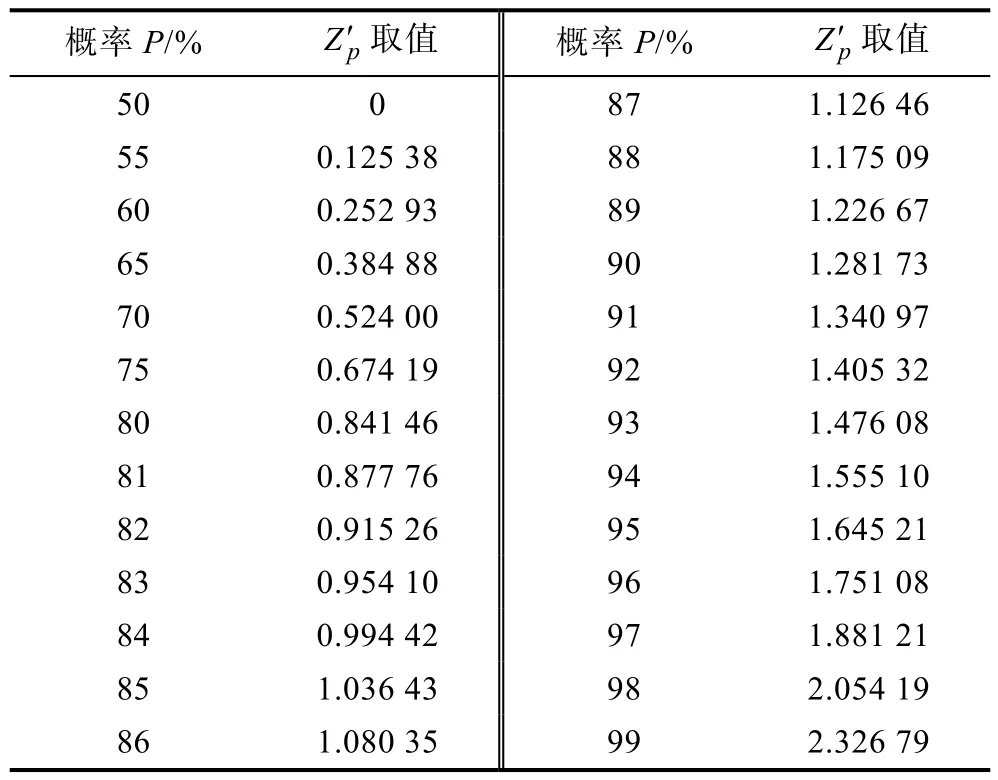
表1 ZP’ 随概率P变化的取值Table 1 Value of ZP’ changing with probability P
4 测试系统组成
4.1 系统组成
整个测试系统如图1所示。GAPS声基阵阵元向上通过试验架放置在水底,经水密电缆连接至试验船的简易控制盒(ECB)上。该水密电缆将GNSS的定位同步信号传输至GAPS声基阵,声信标的定位结果传输至试验船,进一步通过网桥传输至测量船,用于数据的集中记录和处理。
GAPS声信标与 GNSS-RTK天线通过刚性固定杆连接在一起并以 GAPS声信标沉于水下的方式固定在测量船上,在固定时确保声信标换能器与GNSS-RTK的天线垂直以减小测量误差。
试验时,试验船锚泊在GAPS声基阵附近,测量船则以声基阵为圆心按照3 kn、5 kn的速度缓慢转圈,绕圈半径不小于 1 km。在每种航速下,记录GPS的位置信息。
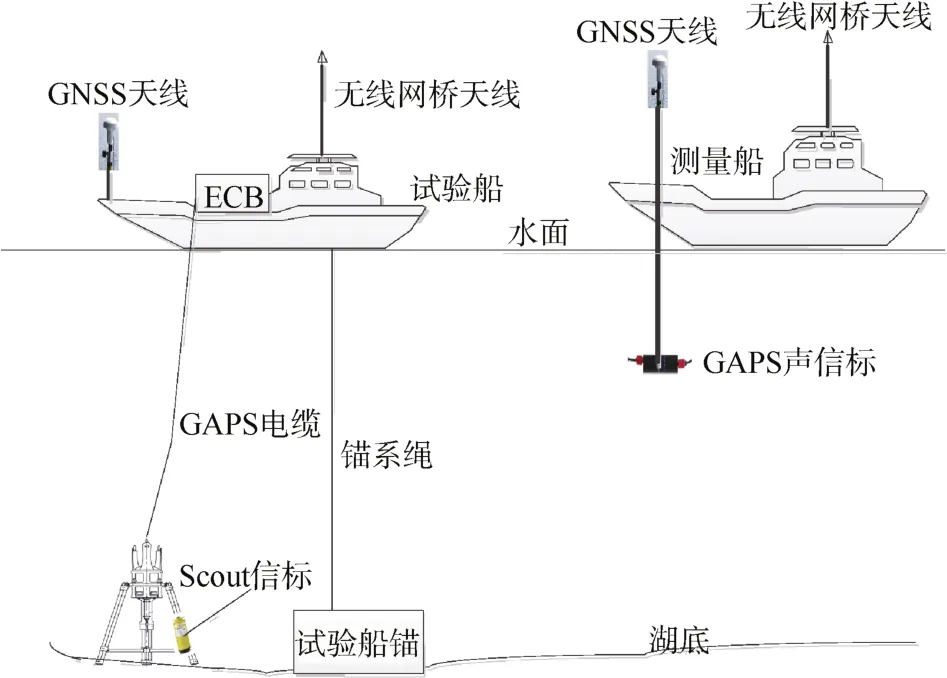
图1 固定点测试系统示意图Fig.1 Schematic diagram of fixed point test system
4.2 试验架的构成
试验架如图 2所示,将布放在湖底。考虑到水底不是平整底面,试验架整体形式设计成类似于重型的三角架,通过 3个点的支撑使得试验架放置稳定。
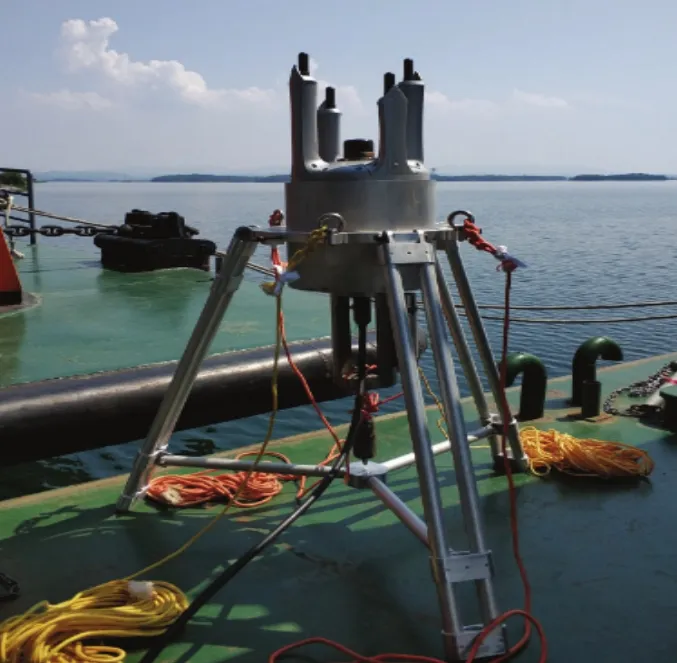
图2 GAPS声基阵安装试验架Fig.2 Support for GAPS acoustic array installation test
试验架安装座设计有万向架装置,使用时通过万向轴上部的被测设备的自身正浮力和万向轴下部配重铅块的作用,使GAPS声基阵接收阵元在水中呈现竖直向上的姿态。
万向架的设计可满足试验架任意方向 30°倾斜状态下,接收阵元都能保持竖直向上的姿态。如通过 GAPS内置姿态传感器得知声基阵倾角不满足试验要求,可进行重新布放。
4.3 高精度定位系统信标
试验架在沉入水底前,可通过 GNSS-RTK信息确定精确位置,但在布放过程中,受各种环境的影响,试验架不会垂直落入水底,所以布放结束后的试验架位置只能通过高精度的水声定位系统进行确定。
本测试试验使用Scout超短基线系统。该设备是英国Sonardyne公司专门为近岸带(0~500 m水深)、近距离(0~1 000 m)跟踪而研发和生产的,主要用于跟踪1~10个水下目标物,并将跟踪到的目标物的大地坐标从系统的串口输出到外部数据采集系统从而完成水下定位。经多方验证,该设备的静态测试精度可以达到0.5%。在使用时,将1个信标安装在试验架上,通过试验船多次围绕试验架测量,可精确确定试验架的经纬度信息。

图3 Scout短基线系统Fig.3 Scout short baseline system
4.4 试验船设备
试验船上安装设备如图 4所示,通过 Moxa NPort5045串口服务器实现网桥网络接口至串口的接口转换及数据共享。网桥则选择成熟的BreezeNET DS.11型网桥,其传输距离为10 km,带宽为11 Mbps,试验船上所有设备通过发电机供电。
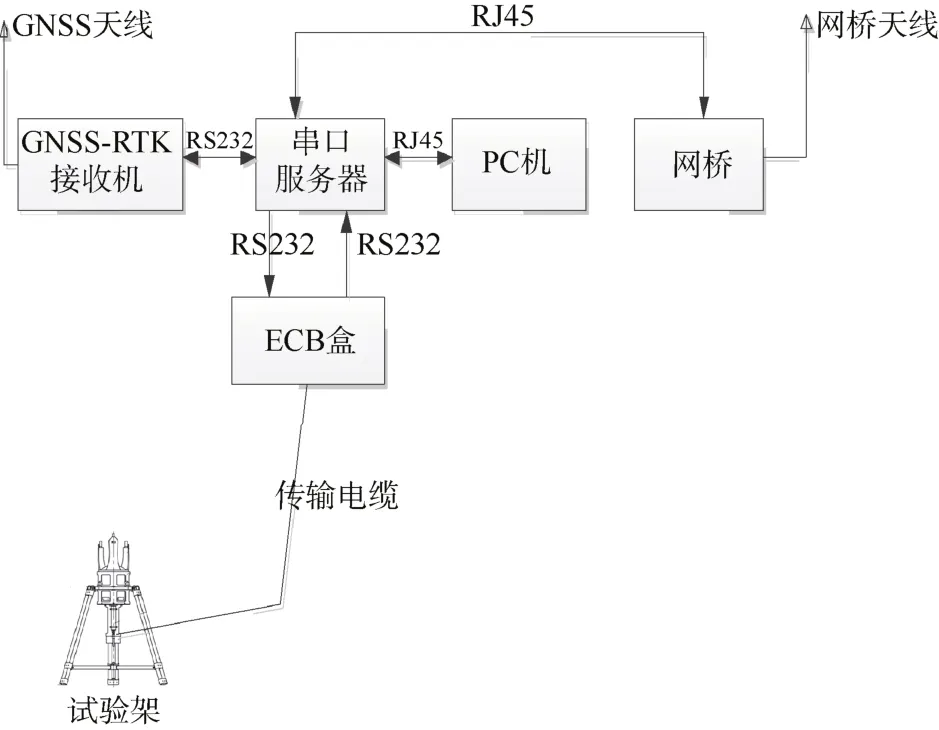
图4 试验船设备组成框图Fig.4 Block diagram of test ship equipment
4.5 高精度GNSS-RTK接收机
本文使用DOVE-E4-PLUS型GNSS-RTK接收机,如图5所示。该接收机使用4G网络接收千寻的网络RTK信号,实现水平精度小于2 cm,高程精度小于5 cm的精确定位。

图5 高精度GNSS-RTK接收机Fig.5 High-precision GNSS-RTK receiver
5 试验方法
试验前将按图4将设备布放、安装完成。测量船围绕试验船绕圈航行。试验船将GAPS输出信号通过网桥传输到安装信标的测量船的数据处理中心,数据处理中心通过软件将 GAPS数据、GPS数据保存到一个文件中。通过计时设备得到数据对比的时间点,在同一个时间点上以 GPS数据为真值,GAPS数据与真值之间通过圆概率误差评定法进行评定。
6 数据结果
本次试验在某水库水域进行,该水域开阔。试验船在以R为半径绕圈时,有不小于2R的机动范围,在2倍声基阵作用距离以内无其他水声干扰。使用RTK定位方式,试验区域离无线电信标台站或基准站的距离应与 GPS定位精度要求相适应,水文地理条件的要求与相关设备要求一致。试验时,试验船以3 kn和5 kn的速度航行时,要求移动测量船在以R为半径绕圈航行时具备良好的机动性。运行轨迹及GAPS定位轨迹,如图6和图7所示。在3 kn和5 kn速度下,圆概率误差半径结果见表2和表3。
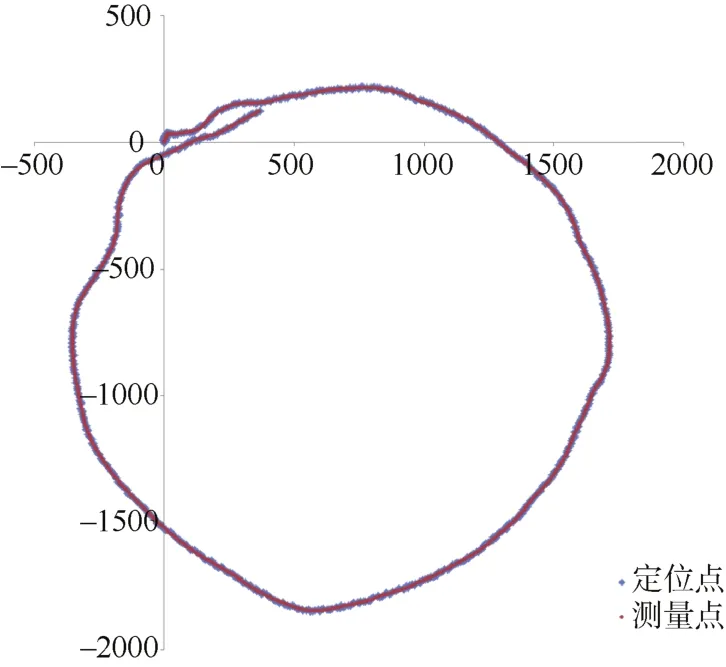
图6 速度3 kn时运行轨迹及GAPS定位轨迹Fig.6 Trajectory and GAPS positioning trajectory at speed of 3 kn
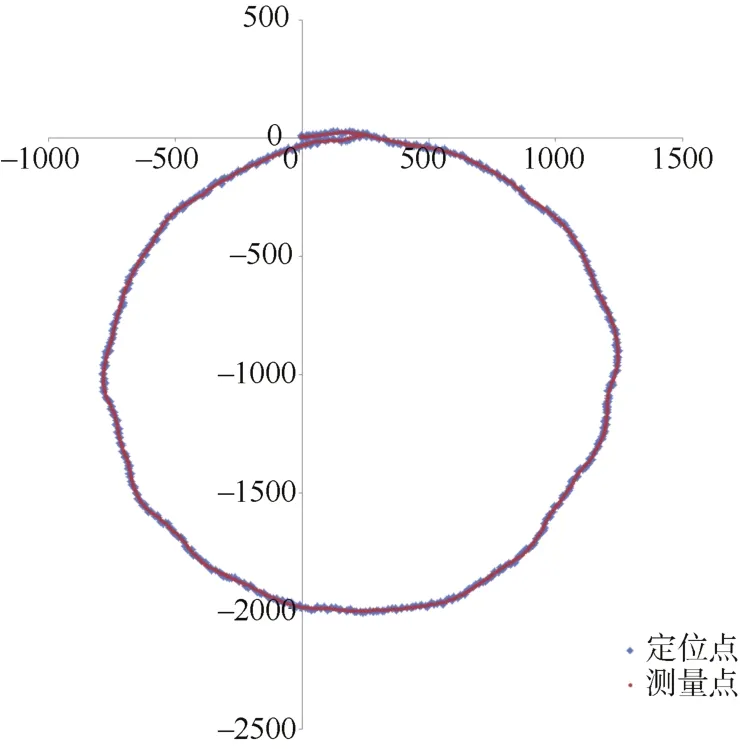
图7 速度5 kn时运行轨迹及GAPS定位轨迹Fig.7 Trajectory and GAPS positioning trajectory at speed of 5 kn
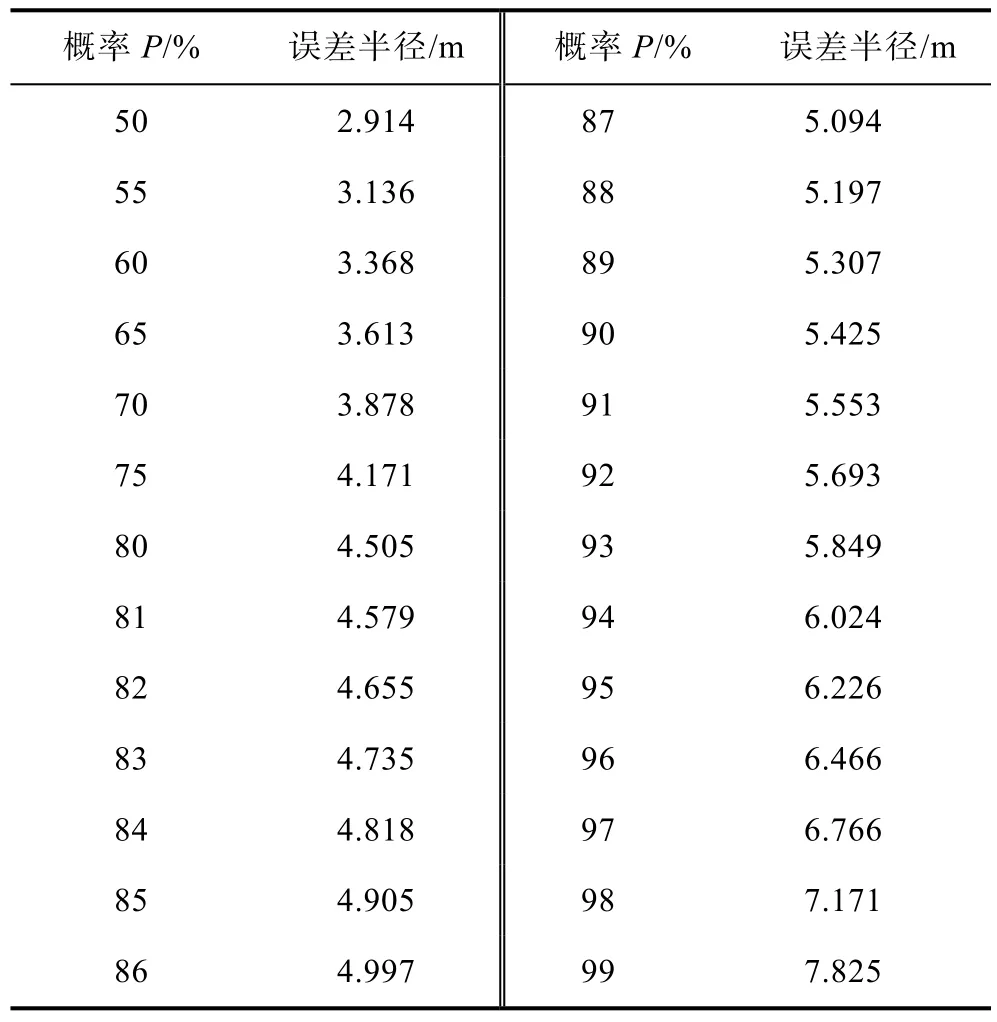
表2 速度3 kn时误差半径计算结果Table 2 Error radius calculation results at speed of 3 kn
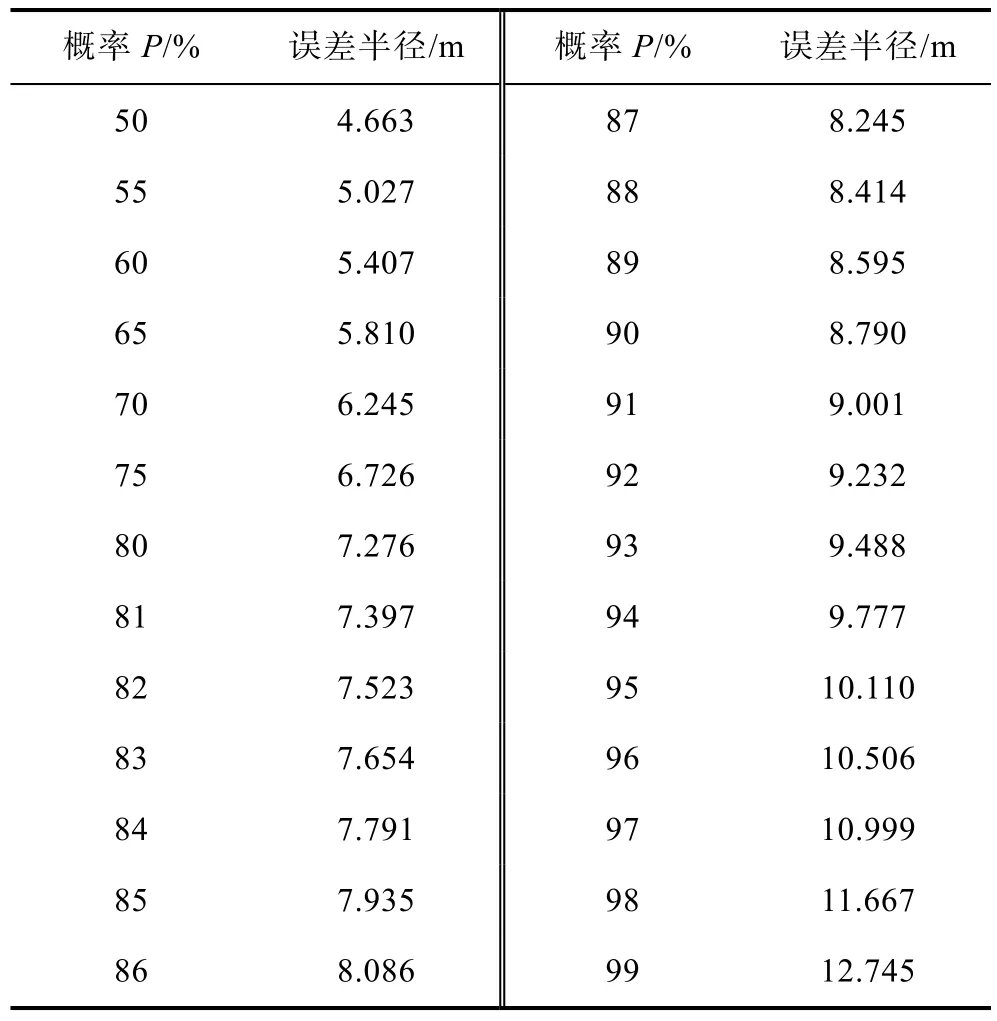
表3 速度5 kn时误差半径计算结果Table 3 Error radius calculation results at speed of 5 kn
7 结束语
本文以GAPS为研究对象,对超短基线水声定位系统动态定位误差进行了研究。其动态误差在速度3 kn时有86%的概率,其误差控制在5 m以内;在速度5 kn时有50%的概率,其误差控制在5 m以内,说明其动态误差与航速关系显著。
