基于太阳能聚光照明跟踪系统的研究与实现
2020-12-24齐学红
齐学红

摘 要:研究了聚光照明跟踪系统及转向装置,分析了隔板式光敏三极管组成光电跟踪系统和L298模块驱动的转动装置;设计了跟踪器的控制电路,采用加减法电路比较相对方向信号,由比较器获得太阳方位信号,经单片机控制机械转向装置,实现对太阳方位和阴晴天的精确判定。对系统的跟踪精度和效果进行了测试,满足室内照明要求。
关键词:聚光照明;光电跟踪;控制系统
中图分类号:TP29 文献标志码:A 文章编号:2095-2945(2020)26-0037-02
Abstract: The spotlight illumination tracking system and steering device is studied, and the photoelectric tracking system composed of a baffle-type photosensitive triode and the rotating device driven by the L298 module is analyzed. The solar azimuth signal is obtained by the comparator, and the mechanical steering device is controlled by the single-chip microcomputer to realize accurate determination of the solar azimuth and cloudy and sunny days. The tracking accuracy and effect of the system is tested, meets the requirements of indoor lighting.
Keywords: spotlighting; photoelectric tracking; control system
太阳能资源具有丰富性、普遍性、清洁性、经济性、健康性等優点,太阳能的开发利用日益成为新能源的开发研究的热点[1]。太阳能可以缓解能源危机,但因存在不足而限制推广[2-3]。光伏聚光照明可将太阳光面积压缩,提高光能量密度,提高效率。光辐照度是光伏聚光照明关键技术,论文分析隔板式光敏管组成的跟踪系统及转动装置,控制转动方向以提高光照度。
1 太阳聚光照明系统
系统由跟踪系统、聚光系统、传输光纤和照明装置等组成。跟踪系统包括太阳方位跟踪器、机械转动装置和控制电路,跟踪系统探测太阳方位,方位信息经处理后,驱动照明装置转动,实现太阳光始终垂直入射光学透镜,光学透镜将太阳光汇聚于焦点,再耦合进光纤,由光纤传输至室内照明。
2 光电跟踪原理及探测器选择
2.1 隔板遮挡式光电跟踪原理
光电转换输出电流或电压与光强关系,单位面元ds上的光通量为d?椎,则面元上光照度E为:E=d?准/dS。由立体角定义得到:d?赘=cos?琢·ds/r2。单位面元ds上的光通量为:d?椎=I·d?赘。面积ds上的光照度为:E=I·cos?琢/r2。可见点光源照射平面,光照度与发光强度成正比,与光源到平面的距离平方呈反比,并和光线与平面的夹角余弦呈正比;垂直照射时光照度最大,水平照射时光照度为零。
2.2 光电探测器和放置方式
光电跟踪器由光敏电阻,光敏二极管,光敏三极管,硅光电池等组成,光敏电阻受温度影响大,探测误差大;硅光电池本质上是太阳能电池;光敏二级管的光电流与光照度成正比,光敏三极管具有电流放大作用(β倍),适合于低光照度环境。探测器放置方式有隔板式、金字塔式、光筒式三种。本设计选用结构简单的隔板式光敏三极管探测器,将探测器置于一个平面内且被隔板隔开,当阳光照射时由于隔板的存在使隔板两侧的探测器受到的光照度大小不等,形成电压,根据电压大小即可判断太阳方位。长方体的4个侧面光敏管探测太阳方位,顶部光敏管探测阴晴天。
3 跟踪系统控制电路设计
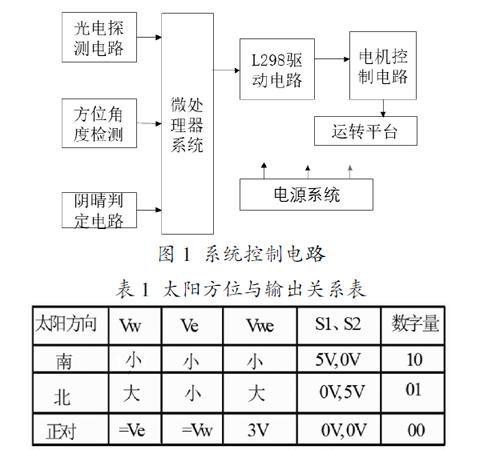
太阳方位跟踪器的外形设计、光电探测器的选择和放置方式决定了跟踪的精度。光敏管采集光照度,经运算放大器放大后到比较整形电路,数字化后传输给单片机,由单片机控制电机转动,电机驱动机械转动装置,实现太阳光的精确跟踪,如图1所示。
3.1 跟踪信号采样电路[4]
选用光敏传感器XD/GB3-A1DPS,当光照强度达到一定程度,光敏管导通,C、E电压降低,输出电压升高,输出至电压跟随器,获得采样电压。
3.2 方向信号处理电路
隔板探测器四个方向光敏管输出采样电压,顶部电压获取太阳方位,南北方向和东西方向电压进行比较。将比较电压送入运放构成的加减法器处理,输出东西方向采样信号,同理设计获得其他方向采样信号。
3.3 方向判定电路
东西方向处理电路输出模拟信号,通过比较电路实现信号模数转换,南北方向判断原理相同,结论见表1。
3.4 阴晴判定电路
光伏聚光照明系统在阳光充足时工作,阴天和晚上应休眠节约电能。
3.5 单片机控制电路[5]
系统对转动速度要求不高,选择普通的AT89S52单片机。在此基础上与采样电路、方位电路、比较器、阴晴判定电路、电源电路构成控制电路。
4 转动设备
4.1 L298驱动模块[6]
L298N驱动芯片15脚封装,内部4路电机驱动输出,二个H桥驱动器,分别驱动直流电机和步进电机。单片机通过I/O接口与模块相连,单片机控制驱动模块,进而控制电机正反转,实现对太阳的跟踪。
4.2 电机及减速传动
直流电机具有调速性能好,调速范围广,易于平滑调节等优点。但是转速太快,不适合太阳跟踪,采用蜗轮蜗杆作为电机减速传动装置,设计采用90°角垂直咬合传动,由蜗杆带动蜗轮转动。
4.3 运转平台
运转平台用于固定、支撑、转动、安放其他部件的装置,底部铁块基座固定整个装置,铁管置于底座起支撑作用。电机转动带着齿轮转动,齿轮带动铁杆转动,实现垂直方向跟踪;垂直方向点转动带着齿轮,齿轮带动铁杆,实现水平方向跟踪。
5 控制软件设计
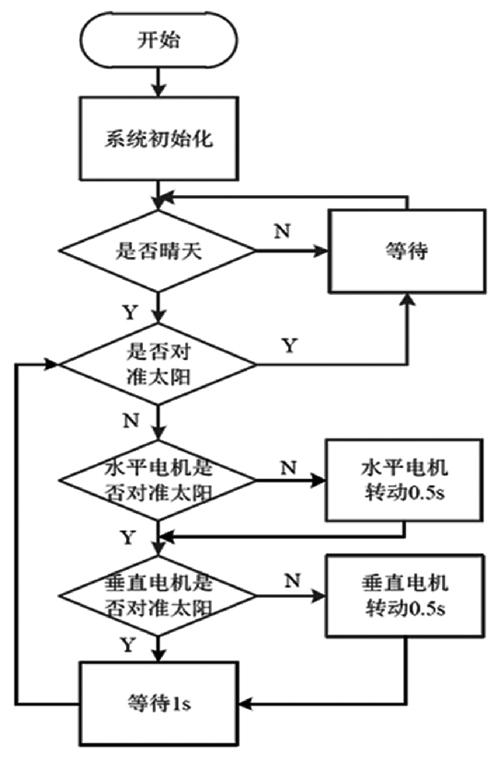
采用C语言编写程序,对管脚和参数初始化,判断阴晴天,如果为阴天,等待一段时间再次判定;判断为晴天,根据比较器的输出值判断跟踪系统是否已经对准太阳,如果判断为对准,则等待一段时间后重复上述过程;如果判断为未对准太阳,则判断水平电机是否对准太阳,未对准则水平电机转动后;再判断垂直电机是否对准太阳,未对准则垂直电机转动,完成上述动作后等待1s后再重复上述过程[5],软件的流程如图2所示。
6 跟踪精度测试分析
采用光电跟踪,具有实时性,当太阳光强度超过预设值时,控制电路启动太阳方位跟踪。比较器输出电压控制机械运转装置,直到对准太阳,跟踪精度取决于跟踪器。设计采用L298N 控制蜗轮蜗杆直流电机的跟踪方案,将菲涅尔透镜安装在固定框内,跟踪器放置于固定框一端,并保持跟踪器侧面的四个光敏管与固定框在同一平面,将坐标纸置于固定框底部,坐标原点置于光斑理论焦点。装置在太阳照度理想的状态下测试,启动电源对太阳跟踪,稳定后记录坐标纸上聚焦光斑中心的位置,連续记录,得到如图3所示的焦点光斑中心位置分布图。测试表明,跟踪精度小于1.0°,误差不大于0.8°,最小精度达到0.4om,最佳出光效率为0.84。经过分析,在阴天测量时,调节可变电阻器,改变参考电压以提高测量精度。
7 结束语
太阳方位跟踪器、控制电路、机械转动装置等硬件和软件设计。能模拟阴晴天跟踪,分析比较器参考电压的取值;测试精度小于1.0°,达到设计要求,实现自动跟踪。
参考文献:
[1]荆雷,王尧,赵会富,等.实现均匀照度光伏聚光镜设计[J].光学学报,2014,34(2):80-85.
[2]安远.太阳能光电技术的发展状况研究[J].中国科技博览,2012(29):370-371
[3]闫云飞,张智恩,张力,等.太阳能利用技术及其应用[J].太阳能学报,2012(51):47-56.
[4]童诗白,华成英.模拟电子技术基础(第五版)[M].北京:高等教育出版社,2015.
[5]张毅刚.单片机原理及应用(第3版)[M].北京:高等教育出版社,2016.
[6]孟智远,任丽娟,王先勇.基于L297/L298步进电机的精确单片机控制程序[J].电子世界,2011(4):43-46.
