直接测量活体环节重量及重心位置的理论与方法探究
2020-12-24金季春肖丹丹李世明
金季春,肖丹丹,李世明
(1.北京体育大学 运动人体科学学院,北京 100084;2.国家体育总局体育科学研究所,北京 100061;3.中国海洋大学 体育系,山东 青岛 266100)
身体环节重量及其重心位置作为基本的人体环节惯性参数,能够反映人体形态结构及质量分布特征,是建立精准的个性化人体动力学模型的关键参数(郑秀瑗等,1998),在提高运动员表现、康复机器人研发、探索生命规律等方面具有广泛的应用前景——个性化工具、防护服、设备和工作站的设计(Chaffifin et al.,2006)以及需要输入环节位置、长度、质量和质心位置的人体三维力学模型等(Chaffifin et al.,1991)。
鉴于上述两个人体环节惯性参数的重要性、基础性,一百多年来,人们一直在探索测量它们的更准确更便捷的方法、手段和技术。已有的最主要测量方法有尸体解剖法、活体测量法和数学模型法(Zatsiorsky et al.,1983)。尸体解剖法是通过解剖尸体对肢解的人体进行环节惯性参数测定(Dempster,1955;Clauser et al.,1969;Chandler et al.,1975)。但由于人体死组织与活组织之间的明显差异以及不同作者收集到的尸体例数均较少,切割技术又很复杂,所以尸体解剖法的样本含量很难达到大样本的要求,因而所测结果的推广必然受到限制。活体测量法能够克服尸体解剖法的局限性,近一百多年来,先后曾出现了称重法、水浸法、快速释放法、机械振动法、放射性同位素法(Zatsiorsky et al.,1983)、CT法(郑秀瑗 等,1998)和MRI法(Cheng et al.,2000;Jeremy et al.,2007;Mungiole et al.,1990;Pearsall et al.,1994)、双能 X 线吸能测量法(Ganley et al.,2004;Laschowski et al.,2016;Merrill et al.,2019a,2019b)等多种活体测量方法。活体测量方法中最著名的是苏联莫斯科中央体育学院的Zatsiorsky等(1983)采用的放射性同位素法又称γ射线扫描法和郑秀瑗等(1998)采用的CT法。这两种方法尽管测试精度较高,但都带有放射性,且不能客观区分身体环节重量及其重心位置的关节轴的位置。此外,γ射线扫描法需要利用床上方的可移动辐射源对准床下方的辐射源检测器对躺在床上的受试者进行全身扫描,而CT法则需要利用CT机把人体从头至脚每隔3 cm扫描一次形成一套横截面图像(郑秀瑗等,1998),因此很难获得大样本数据。除了上述两种直接测量法,数学模型法是利用几何图形模拟人体环节以求得环节参数的方法,如Yeadon(1990)提出的40个环节组成的人体数学模型。数学模型法一般要建立在其他方法的基础之上,各环节重量的计算是利用尸体资料建立的回归方程(Hay,1973)。由于尸体资料有限,直接导致人体数学模型的建立同样存在样本量少的问题,回归方程的精度会受到影响。
当前,随着外骨骼机器人、康复机器人等智能类人产品的飞速发展,人体环节重量和重心位置的精确测量在该领域得到了前所未有的重视,人体环节参数对于更好地维持机器人的平衡和正常工作具有重要的现实意义。尽管测量人体环节惯性参数不是一个新问题,但对该问题的探讨国内外学界却一直没有停止,如如何利用一维平衡板来推算人体环节的重心位置(Adolphe et al.,2017),研究如何利用无标志点的运动捕获系统测量从坐到站的人体总重心位置(Tanaka et al.,2019)等。从目前的研究和使用现状来看,对于身体环节重量及其重心位置这两个参数还远未实现个性化测量,对于活体的测量又多是间接的方法,严重影响了精准的个性化人体模型的建立以及人体运动规律的探索。因此,本文拟利用平衡板法(金季春,1998;李世明,2004)对身体环节重量及其重心位置两个惯性参数的测量方法进行数学推导,在分重心与总重心联动关系的基础上进一步提出了“金三角”的形成假说,以此为基础,可以推算15个人体环节重量和重心位置,为人体的称重实验测量奠定理论基础。同时,期望“金三角”的形成假说能够抛砖引玉,以更好地揭示人体运动的内在奥秘。
1 平衡板原理:测定人体总重心的位置
当物体平衡时必须满足两个条件:作用在它上面的合力等于0以及合力矩等于0,即∑F=0和∑M=0。应用这两个方程,可以求出在平衡板上人体某个姿势时的总重量和总重心位置(运动生物力学编写组,2016)(图1)。

图1 测量人体总重量和总重心位置的平衡板Figure 1.The Balance Board for the Measurement of Body Weight and Center of Gravity
人体是由多个环节(两个关节之间的肢体)组成的。人体在运动中主要活动的关节有髋关节、膝关节、踝关节、肩关节、肘关节、腕关节、颈椎关节和腰椎关节,因此有头、上躯干、骨盆、大腿、小腿、足、上臂、前臂和手共15个环节,每个环节都需要测定重量和重心位置。但是,利用平衡板只能列出两个方程,解两个未知数。也就是说,已知人体在某个姿势下的总重量和总重心位置的条件下,无法获得各个环节的重量和重心位置。
2 分重心与总重心联动关系:两个运动轨迹是相似形
图2是本文所用的智能身体环节参数测量仪的机械图,由两部分组成:底下支在测力传感器上的一块平衡板和顶上的激光定位装置(图2a)。上、下两部分处于同一坐标系内(图2b)。测力平衡板测身体重量及总重心的位置,激光定位装置安放在所测环节上标志的坐标,即该仪器同时测量身体重量及总重心和所测环节上的标志的坐标。
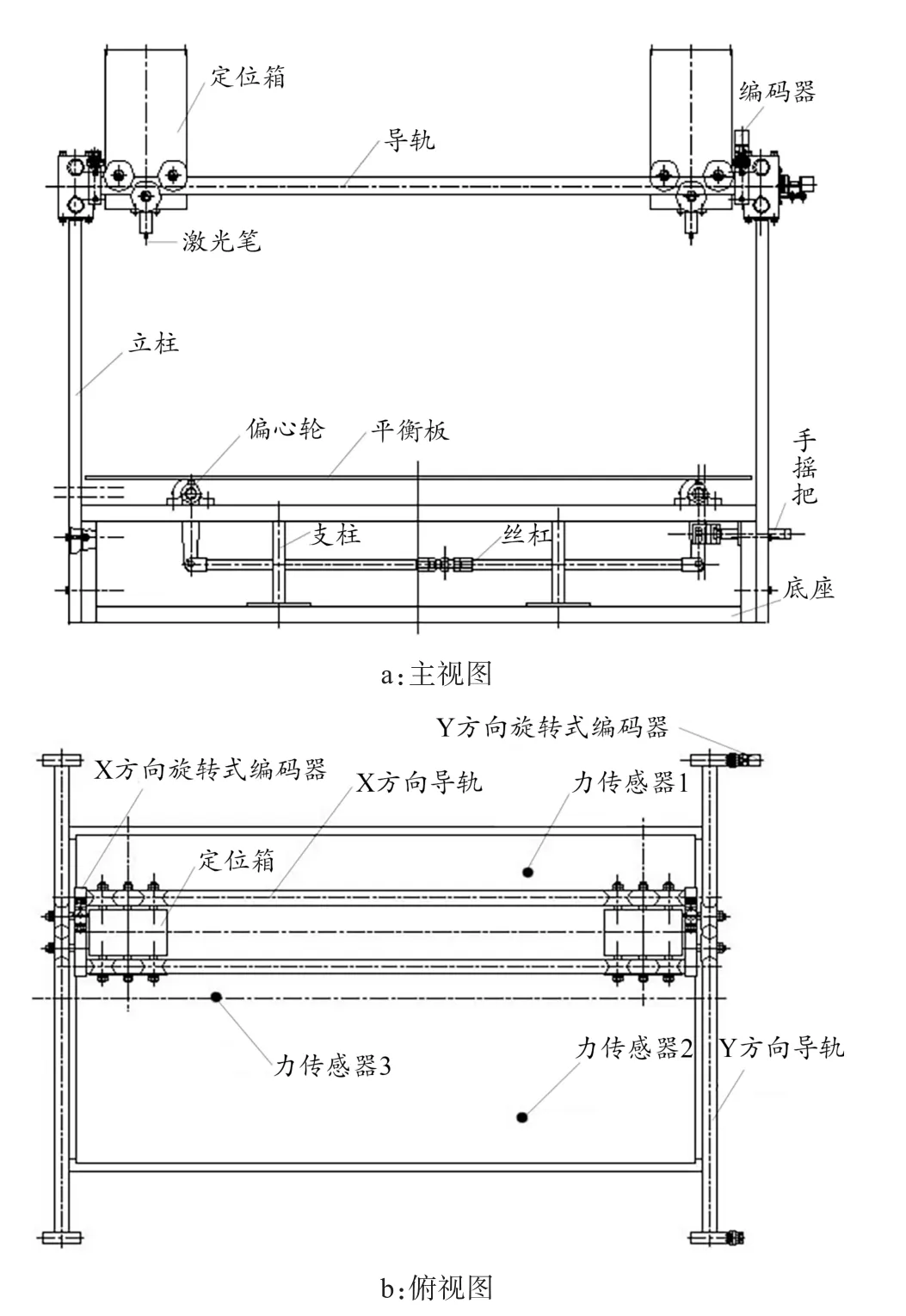
图2 智能身体环节参数测量仪Figure 2.The Mechanical Chart of the Intelligent Instrument in Body Segment Measurement
首先,假定身体由所测环节(如左下肢)和不动环节(除左下肢外的身体其他环节)两个环节组成。保持身体其他环节(不动环节)在平衡板上不动,让所测环节(左下肢)绕关节(左髋)移动3个位置,则通过平衡板可测得3个总重心位置。在所测环节上任意确定一个固定标志点,假设所测环节绕关节中心做圆周运动,则根据这个点的3个位置可以求出关节瞬时转动中心。从实验可知,当组成总重心的一个分重心运动时,总重心也随之联动,产生一个与分重心运动轨迹相似的轨迹,图形大小比例等于两个分重量之比。把这个规律叫作分重心与总重心的联动关系。下面来证明这个关系。
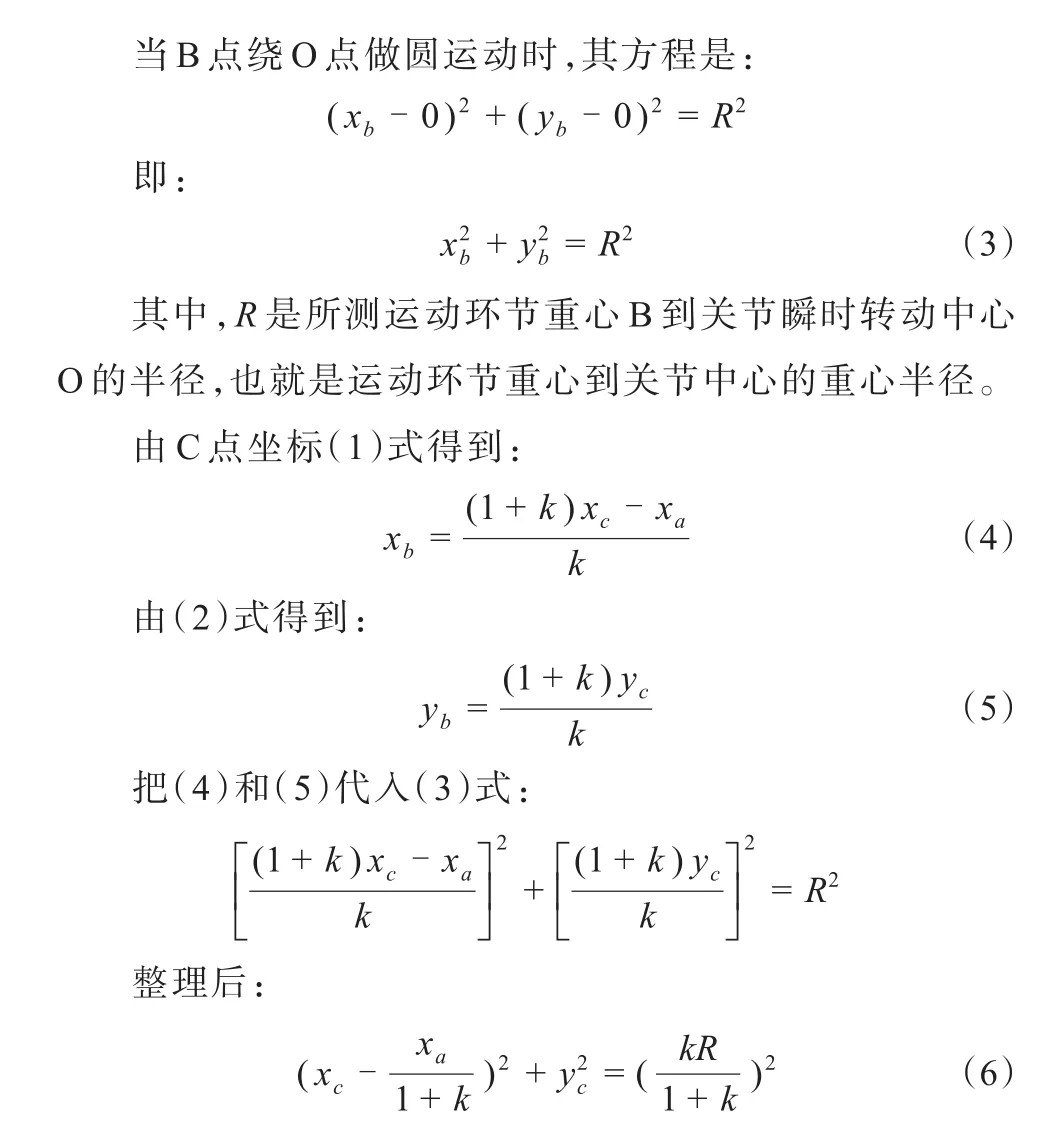
如图3所示,假设所测环节重心在B点,身体其他不动环节的重心在A点,建立直角坐标系:原点放在关节瞬时转动中心O。x轴是联结O点和A点的直线,则A点和 B 点的坐标是A(xa,o),B(xb,yb)。由于身体总重心 C 点总是位于直线上,且定分成一比例(重心合成定律),设定比例系数为k,则C点的坐标是:
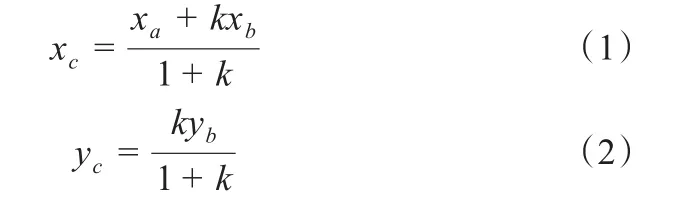

图3 分重心与总重心的联动关系Figure 3.The Law of Interaction between the Sub-center and the Total Center of Gravity


根据力矩等效原理,从图3可以得到一个关系式,即体重与总重心圆半径rc的乘积等于所测环节重量WB与环节重心半径RB的乘积:

根据分重心与总重心联动关系,所测环节移动3个位置可获得人体总重心的3个位置,由于3点可确定1个圆,故可得到总重心圆的圆心Q的坐标与半径rc,人的体重Wc可称得,根据式(8)可得 Wcrc,也就是可得WBRB,但所测环节重量WB及其重心半径RB无法分开获得。
3 构建“金三角”:求解游离四肢的环节参数
由于人体结构基本上是左右对称的,能否在上述联动关系基础上,让另一个对称肢体(如右下肢)运动,从而产生另一个总重心圆(QHR),进而找到解题途径呢?
如图4所示,以人体两侧下肢为例来说明“金三角”的形成假说。假设HL为人体左髋关节中心、HR为人体右髋关节中心,L点为人体其余不动环节(躯干+左右上肢+头)的重心,则HL、HR、L三点就构成了一个三角形。假设这个三角形能够确定的话,那么,两侧下肢和人体其余不动环节的重量和重心位置均可求得,这相当于找到了一把通过称重实测完全求解人体环节重量和重心位置的“金钥匙”,因此定义该三角形为“金三角”。
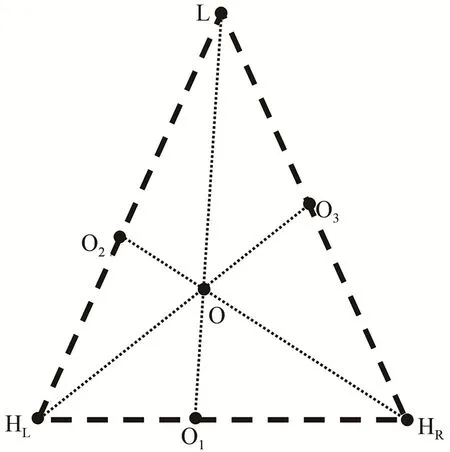
图4 “金三角”形成假说Figure 4.The“Golden Triangle”Theory Hypothesis
人在平衡板上将两侧下肢分别竖直置于两髋关节中心之上(这一动作身体柔韧性好的人群可以做到,如艺术体操运动员群体等),且让两侧下肢分别在平衡板上转动3个位置,利用平衡板上面的坐标定位系统可求得转动圆心即两髋关节中心的位置,即HL、HR两点的坐标已知。遗憾的是,目前人体其余不动环节(躯干+左右上肢+头)的重心L点未知,还无法唯一确定该三角形。但是,我们深信人体躺在平衡板上就一定存在这个三角形,且此三角形是解开称重法实测人体环节重量和重心位置这一世界级难题的一把“金钥匙”,故在此提出“金三角”假说,希望能够抛砖引玉,引起更多专家学者的重视,一起来寻找求解L点的路径和办法。
利用图4的“金三角”△HLHRL求解人体环节重量和重心位置的思路如下:假设已知人体其余不动环节重心L点,两侧肢体转动中心HL、HR点以及当两侧下肢均竖直置于两髋关节中心时平衡板所测得的人体总重心O点,连接L和O并延长交HL与HR的连线于O1点。按照同样的方法连接HL与O、HR与O,分别交HRL连线和HLL连线与O3、O2,则有:

联立上述公式,可得到 WL、WHR、WHL。
在确定了“金三角”后,以及求出3个未知重量WL(躯干+左右上肢+头的合重量),WHR(右下肢重量)和WHL(左下肢重量)后,可以确定所测环节的重心,即RHR(右下肢重心半径)、RHL(左下肢重心半径)、RL(躯干+左右上肢+头的合重心半径):

其中,rHR是右下肢对应的右总重心圆半径,rHL是左下肢对应的左总重心圆半径、rL是躯干+左右上肢+头的合重量对应的总重心圆半径,W为人体总重量。
“金三角”方法包含了式(9)~式(15)共计6个算式。已知参数:;可求出参数:WL,WHR和 WHL、RHR、RHL、RL。
依此类推,可求出小腿+足的重量(WsfR和WSfL)和重心半径(rsfR和rSfL),并按下式求出大腿的重量(WHRT和WHLT)和重心半径(rHRT和 rHLT)

上肢的整个肢体、上臂及前臂+手按同样方法测出。
4 循环搜索法:测量头、上躯干及骨盆的参数
上述方法可分别测量出四肢的运动环节参数:大腿、小腿加足、下肢、上臂、前臂加手、上肢,而头、上躯干及骨盆的参数需在之后进行。通过让骨盆和左右下肢(已测出下肢的重量和重心位置)保持不动,让上躯干加头和左右上肢组成一个环节绕腰椎关节运动,测出腰椎关节中心和总重心圆(图5)。

图5 循环搜索法:测量头、上躯干及骨盆的参数Figure 5.Cyclic Search:the Parameter Measurement of Head,Upper Trunk and Pelvis
由图5可知,在已知身体总重量W、总重心圆心Q及WHL、WHR、HL、HR和 L 情况下,须求 WL、WP及重心 P 的位置。
先求WHR和WHL的合重量WN及合重心N。联Q、N,可知WL和WP的合重心R必在直线QN上。由于已知W、WN、重心Q和N,可求出WR及重心R:

再通过循环搜索法求WP、WL及重心P。在直线上按一定步长取假想点P’,因为已知WR及’长度,则用 WP+WN+WL是否等于W进行判别:若相等,WP、WL是真实值,P’即是骨盆的重心;若不相等,继续按规定步长取下一个假想点P’,并做判别,直至找出真实值为止。
WL是躯干+左右上肢+头的合重量,由于左右上肢已测重量,WL-2WSHL(左右上肢重量)就是上躯干+头的重量,它们距腰椎中心的距离也可求出。
为了求出头的重量,可让头绕颈椎关节运动,确定颈椎关节中心。由于身体其他各环节的重量和重心位置已求出,则头的重量和重心位置亦可确定。
由于人体手和足重量相对很小,其运动对总重心影响也很小,虽然理论上可以应用上述方法测量计算重量和重心位置,但实际测量时的相对误差较大。因此,可以将手和前臂看做一个环节,将足和小腿看作一个环节。至此,按照上述方法步骤,可以测量计算人体头、上躯干、骨盆、左右上臂、左右前臂手、左右大腿、左右小腿足共11个环节的重量和重心位置坐标,当然,也能获得左右下肢或左右上肢的重量和重心位置。
5 人体环节惯性参数个性化测量:应用前景
5.1 探索生命规律
1)已有研究都是从测量人体各环节的外形(长度、围度等)来研究身体体形和各部位比例特征,并用各种指数(腿指数、臂指数)来说明人体运动功能。而有了大量的个性化各环节重量和重心位置参数的实测数据,就像体重指数(BMI)那样,可以更深入探讨人体体形、比例及各种指数的生命原因,了解具体个体的特征,对于运动选材、个性化技术特征、运动成绩的提高以及采取针对性的干预措施、防病治病、强身健体均有一定的积极意义。
2)深入研究肌肉力量本质。目前技术已可测量人体运动环节的角加速度,正在探索应用肌电图技术定量肌肉力量的方法,但目前较为困难。如果确定了个性化的各环节重量和重心位置,则可通过动力学公式:F=ma(力)及M=Iα(力矩)计算出更为个性化的关节力(力矩),继而可深入了解肌肉力量变化的规律,包括肌肉力—长度和肌肉力—速度关系的规律。
3)定量人体运动的能量消耗。由于知道了人体运动环节的重量和重心半径,同时可以测量人体运动环节的位移(角位移)、角速度和角加速度,因此,可以运用功能原理及能量守恒定律来定量人体运动的能量消耗,进而探索身体活动与人体生理反应之间的客观规律,为全民健身促进全民健康服务。
5.2 深入了解肥胖发展的部位及时间,为科学控制体重打下基础
目前只能通过总重量来了解体重变化情况,通过人体运动环节参数测量可以进一步了解人体各部位体重的变化情况,确定肥胖发生发展的部位,进而采取针对性的干预措施。
5.3 提高假肢的适体性
假肢的物理性能(重量、重心位置及转动惯量)越接近该人的活体情况,安装的假肢就越舒适,使其恢复的正常功能也越大。因此,如能在他受伤之前就有各环节测量的数据,则假肢企业就有了依据,就可以定制出适合这个人原来肢体物理性能的假肢来。这对伤残者和假肢企业都有重大价值。
5.4 改进优秀运动员个性化技术
在奥运会赛场上,细节决定胜负。谁的技术动作更有效,更能节省体能,谁就更有机会获胜。同样身高体重的人的各运动环节参数也是不一样的,这决定了他们的动作技术有鲜明的个性化特征。本文为全面、准确地测量优秀运动员各环节参数提供了方便的、能为运动员和教练员接受的测量手段,即为设计、改进运动员的个性化、高效和安全的技术动作打下了坚实的生物学基础,在运动训练中具有广阔的应用前景。
5.5 建设人体运动环节参数数据库,为“互联网+”打下基础
本文采用返璞归真的称重方法测量人体运动环节参数,因此,可以大规模地、持续地、重复跟踪地进行测量,建立人体运动环节参数数据库,不仅可以进行流行病学调查,探索人体体形、肢体比例、各种指数与人体生命健康的关系,更可为“互联网+”的广泛应用打下基础。
6 结论
1)在基于平衡板法的分重心与总重心联动关系的基础上,进一步提出了“金三角”的形成假说,若该假说成立则会实现人体环节重量和重心位置称重测量的历史性突破,但目前该假说还有一个难点问题没有解决,在此希望抛砖引玉,吸引更多专家学者的关注和争鸣,一同探寻解决这一世界级难题的“金钥匙”。
2)实现人体环节惯性参数的个性化测量应用前景广阔,将为探索生命规律、解决肥胖问题、提高假肢适体性、改进个性化运动技术、建设人体环节参数数据库等领域奠定基础。
