水下导向攻泥器应用研究及改进方案
2020-12-23徐永琦
徐永琦

摘 要:本文通过抓住沉船打捞工程中关键技术——攻打千斤洞技术面临的风险、效率、关键性这一痛点,结合传统打捞和现代打捞的实践经验,梳理了传统、陆用、国际国内攻打千斤洞的装备和作业流程,针对现有装备、技术的不足,提出了系统的装备改进方案。
关键词:沉船打捞;水下攻泥器;水下导向攻泥器;改进
中图分类号:U676.6+2 文献标识码:A 文章编号:1006—7973(2020)11-0142-05
水下沉船打捞一般包括以下几个流程:沉船探摸、打捞方案制定、打捞工程船舶进场就位、清防油污、水下卸货、攻打过底千斤洞、穿引过底千斤、沉船起浮、封舱抽水、调整难船姿态直至自浮。
国内外沉船打捞目前大部分采用工程起重船抬浮打捞法或浮筒抬浮打捞法,攻打千斤洞技术是沉船打捞工程中经常采用的,也是一项非常关键的技术,千斤洞攻打的效率、质量和精度往往直接决定了打捞作业的成败。随着陆用攻泥器装备在沉船打捞中的应用,攻打千金洞的效率和安全性得到较大提高,但现有装备仍然存在明显不足,难以满足大深度、大吨位沉船打捞的需要,本文通过对水下导向攻泥器的应用研究,创新性地将现代海工装备的新技术综合应用到新一代的水下导向攻泥器上,大大提高了攻泥器的性能、作业效率及施工的安全性,将沉船打捞攻打千斤洞技术提高到了一个新的水平。
1水下攻泥器应用的起源
以往沉船打捞作业主要集中在30m以浅水域,千斤洞的攻打方式有“潜水员水下人工攻打”和“非开挖定向钻机攻打”两种方式。
1.1潜水员水下人工攻打
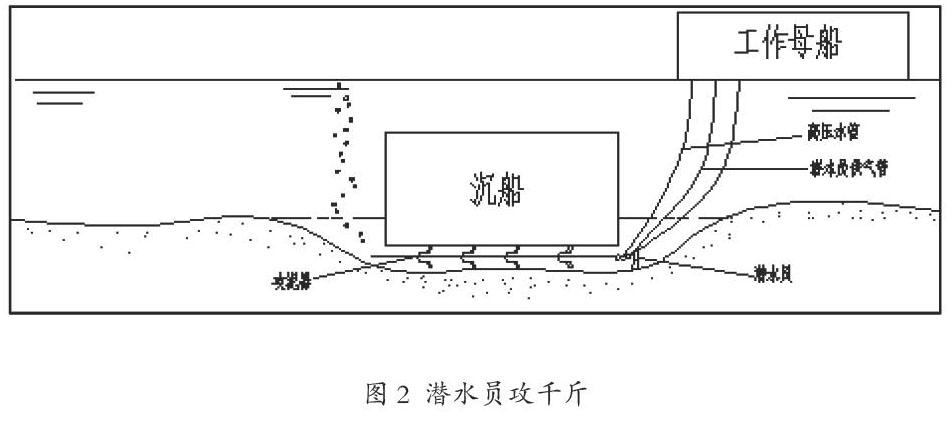
长期以来,救捞系统打捞工程攻打过底千斤洞一直采用由潜水员水下手持分级攻泥管,蹬在预先在沉船舷侧开挖的工作井井壁上,利用高压水完成攻打千斤洞的任务。这是以多级式攻泥管和高压水枪为主要施工设备,以潜水员为水下作业主体的施工方法。施工方法如图2所示,施工程序如下:
(1)按照施工方案中预定的过底千斤洞位置,潜水员沿沉船艏艉向,将每道千斤洞位置计量准确,做好标记。
(2)在沉船舷侧攻打千斤洞位置先冲出一个深度低于船底,其长、宽便于潜水员作业的工作井,同时在沉船另一侧的对称位置,也冲出一个相似的工作井。
(3)潜水员在工作井中,用攻泥器喷射头借高压水的冲力,在船底泥砂中冲出一个孔洞,孔中冲散的泥砂会随喷射头上的反射水孔喷出的水流流出洞口,每当潜水员攻过一节管都要探摸攻泥器方向是否准确,以便及时纠偏。
(4)当预计攻泥器管节数已全部攻过船底时,在最后一节原来用封头封住的短管旁侧的接头上,连接压缩空气气管,并向攻泥器供气,当空气从攻泥器前端冒出时,潜水员在沉船的另一舷的工作井中可通过空气泡寻找到攻泥器前端,并在其上先连接一根细钢丝,通知对面潜水员回收攻泥器,将细钢丝牵引过船底,再将较粗的钢丝绳引过船底。
1.2非开挖定向钻机攻打
陆上非开挖定向钻机攻打沉船过底千斤洞技术是将陆地管线施工中所采用的非开挖定向钻机应用到浅水沉船的过底千斤洞攻打中,是陆地非开挖定向钻机应用的扩展。由于钻机是安装在作业母船的舷侧,从钻机到泥面有较远的距离,所以为了支承和保护钻杆,需要专门设计一个导向架直接从钻机延伸至泥面。
1.2.1钻杆导向架参数确定及安装
确定钻杆导向架技术参数,包括导向架水底端距离沉船的距离、钻头与水平面的夹角、钻杆导管与工程船船舷的夹角以及受钻杆影响的导管弧度。导向架的相关参数要根据沉船状况及沉船水域的实际情况预先制定。
1.2.2定向钻机的安装
导向架安装完毕后,按导向架位置安装定向钻机,并以定向钻机首部为支点固定在船舷上,定向钻机液压设备将钻机艉部支起,机身与导向架入水角相等并在同一直线上,钻机位置调整好后,焊接拉杆将其固定。定向钻机就位后,将钻机上的钻杆与预先放置在导向架中的钻杆对接。
1.2.3攻打千斤洞、 牵引过底千斤
攻打千斤洞时,定向钻机驱动钻杆旋转,将钻杆通过导向管架攻入船底,当攻过一节钻杆后测量一次钻头的实际位置,确定位置无误,钻机动力头回转卸下钻杆退回原位,工作人员接入另外一根钻杆,如此反复进行钻进作业,当预计钻杆攻过船底后,接入高压空气,潜水员在沉船另一舷通过气泡寻找钻头,并在钻头上连接一根细钢缆,操作定向钻机回拖钻杆,将细钢缆引过船底,将较粗钢丝绳引过船底。
1.3传统设备的局限性
1.3.1手持分级式攻泥器
潛水员水下人工攻打千斤洞技术已经有几十年的应用历史,在30m以浅和海底地质比较理想的情况下,人工攻打千斤洞已是一项比较成熟的技术。人工攻打千斤洞工作量太大,受条件限制较多,水下劳动强度也比较大,施工中往往要花费非常多的时间(其作业时间可能占到整个打捞工期的一半以上)来完成这道工序,对施工造成了不利影响,手持分级式攻泥器都无法满足目前大型船舶深水打捞及快速打捞的要求。其局限性如下:
(1)工作环境差,危险性高;
(2)水下工作量大,劳动强度高,效率极低;
(3)缺少导向定位,精度不足。
1.3.2陆上非开挖定向钻机
将陆地非开挖定向钻机应用到沉船过底千斤洞攻打作业,虽大大降低了人工作业的劳动强度和安全风险,显著提高了作业效率和施工质量,但也存在着一定的使用局限。
该技术在30米以浅水域中已经得到了非常有效和成熟的应用,但对于更深的水域却难以调和钻杆导向架延长所导致的结构强度降低和导向架重量增加的矛盾。随着作业水深的加大,钢套管的尺寸和结构强度还要继续加大,甚至需要加桁架来保护钢套管。因为钢套管及保护桁架连接着水面工作母船和水下作业平台,所以导向管架在海况恶劣的情况下极易发生折损。
2水下导向攻泥器国内外现状
2.1水下导向攻泥器
水下导向攻泥器(深水非开挖定向钻机)是用来对沉没水域水深较大的沉船沉物进行过底千斤洞攻打的设备,该设备采用类似于陆地非开挖定向钻机的施工原理,不同之处在于钻机模块需要放置在海床上,作业环境为水环境。
水下导向攻泥器需要将钻机的动力系统、集控系统放置于作业船舶的主甲板上,这些系统通过脐带缆与海床面上的钻机模块进行连接,来进行动力、监控、操控等的传递。由于施工作业的海床面不同于陆地,钻机模块需要放置在具有防沉和锚固功能的水下作业平台上,以保证钻机模块的作业姿态以及为钻杆推进和回拖提供支持力。为直观和全面地监控钻机系统的水下运行情况,钻机模块内需要配置全方位的监控功能,包括照明、视频监控、水下钻机姿态的三维实时显示、艏向指示、传感器信息显示(钻进力/回拖力、液压系统参数、触地状态、钻头限位等)、钻杆轨迹显示(钻进距离、钻进速度、钻头深度、钻头体方位角度等)以及各种应急报警界面等。操作人员通过在集控室内观察各监控界面的实时状态,来操作和调整钻机系统的运行。
当钻杆从难船的一侧贯穿船底到达另一侧并露出泥面时,潜水员下水寻找钻头位置并将牵引钢丝连接到钻头上,钻机回拖钻杆完成牵引钢丝的过底穿引,再由牵引钢丝完成沉船沉物起浮千斤的穿引。
2.2国外设备情况
国内外大型打捞公司都开展过水下导向攻泥器的研究,其原理都是基于陆地非开挖定向钻技术,并且已经将技术成果应用于打捞实践,对改善水下作业安全和提高施工效率起到了巨大的促进作用。
欧洲SMIT打捞公司与TERRA专业非开挖技术设备公司合作成功开发出了第一套水下导向攻泥器系统,该系统采用典型的陆用非开挖定向钻机进行水下适用性改造,如图7所示。
2.2.1技术规格
本套设备是TERRA公司在2000年根据陆地用非开挖设备研制的水下导向攻泥器,最大作业水深50m,每节钻杆长度1.5m,钻杆有3200N·m扭矩,能够自动换杆,自动定位,自动钻进及回拖。该系统通过水面中央监控站对水下主机进行遥控操作,具备对5万吨的大型沉船完成水下自动攻泥作业的能力。其主要技术参数如下:
扭矩,3200 N·m;
顶推力,65 kN(6.5tons);
回拖力,130 kN (13tons);
钻进泥浆流量,87 Itr/min;
钻进液压力,72 bar;
最大水平钻进长度,84m;
最大回扩直径,260mm;
最大作业水深,50m;
脐带缆长度,130m;
适用土壤条件砂土及粘土;
沉船淤埋最大深度,4m;
千斤洞在沉船下方的深度,4m;
沉船最大宽度,40m。
2.2.2设备组成
整套设备由水面系统、水下系统和脐带缆系统三部分组成,水面系统用于提供动力和操控,水下系统用于钻进和回拖,脐带缆系统用于连接水面系统和水下系统。
水面系统主要包括中央控制单元、钻杆轨迹实时监视单元、动力单元和脐带缆绞车单元。水下系统主要由水下钻机模块、地锚单元和导向定位单元组成。脐带缆系统包括动力缆和信号缆,用于为水下系统提供动力、传输监视和控制信号等。
SMIT公司的水下导向攻泥器的钻杆采用节杆形式,需要配备自动换杆单元进行钻杆的连接和分离。
2.3国内设备情况
目前,我国救捞系统在深水过底千斤洞攻打方面,已经投入使用的有2套设备。
2.3.1“深鳗I”
“深鳗I”也是基于陆地非开挖定向钻机研制,通过对水下钻机遥控完成定向钻孔,穿越沉船、沉物下的泥底,再将牵引钢丝回拖,达到穿引过底千斤的目的。
该设备钻机采用2″的连续柔性钻杆及惯性定位导航技术,钻头通过高压喷冲+液控换向器旋转实现破土钻孔,可实现最大100米钻进距离的千斤洞攻打作业。
“深鳗I”的钻机模块尺寸为9.1m(L)×4.1m(W)×4.51m(H),空重约40T,最大设计深度为200m,最大设计钻进距离为100m。基本技术参数如下:
顶推力,3t;
回拖力,6t;
钻杆长度,120m;
最大水下工作深度,200m;
外部供电制,380V/50Hz;
适用土壤条件,淤泥、粘土、砂质;
钻机具有自动钻具保护功能(报警、自動停机等);
钻机遥控作业系统兼有钻杆推进、回拉等工序;
推送机构角度调节的范围,纵倾角11°~28°;
结构形式:开敞式,即滑撬和框架相结合的形式;
监控导航系统:综合水下的传感器和信息采集设备,具有水下设备遥控功能;具备钻头位置测量和导向功能,并提供GPS和超短基线系统接口,当与定位设备连接时,具备攻泥器水下定位能力;
主监控界面:显示攻泥器的系统状态和位姿信息;
钻杆轨迹显示界面:显示钻进轨迹和预定义轨迹;
脐带缆和脐带缆绞车:脐带缆采用3000V铠装脐带,绞车采用带滑环和排缆机构的液压绞车,储缆200m,操作可在控制室进行;
水面控制室:配电、泵控等设备均布置在水面操作控制室内,监控导航、液压操作、绞车操作和送缆机的操作及数据反馈也在监控室内。
2.3.2“深鳗II”
该设备是在原“深鳗I”的技术基础上,研制的第二代水下攻泥器系统,适用水深200米,最大顶推力18吨,回拖力36吨,与“深鳗I号” 的3吨顶推力相比,其能力放大6倍,采用了更加先进的钻具及控制系统,支持海底穿越,高效无人作业。
该水下导向攻泥器主要由水下钻机模块、水面支持系统和脐带缆系统三部分组成,攻泥器钻杆仍采用柔性连续钻杆,水下钻机模块采用四点锚固形式,可满足200m水深范围内的水下导向攻泥作业。其性能要求如下:
水下本体工作水深定为200m以浅;
适应地质:沿海浅地层的淤泥、粘土、砂质,不适宜于较硬地质;
千斤洞穿引长度以沉船宽42m计、沉船埋深5m以内(不含淤泥层),考虑到富有余量,水下导向攻泥器钻杆长度为120m,可根据需要连接直径不小于300mm的扩孔器进行回拖扩孔;
水下各系统均采用液压为动力,钻机回拖力不小于36t,挤推力不小于18t,扭矩不小于1000N·m;
打捞工作船可监视导向攻泥器的运动轨迹,钢丝在水底的穿入及穿出点的位置可控;
脐带缆长度不小于250m;
攻泥器的整机高度不大于4.1m,以便公路运输。
2.4现有设备存在的问题
(1)接杆式攻泥器的自动换杆、接杆装置在深水下工作,可靠性、故障处置效率存在较大风险;
(2)“深鳗”系在深水作业投放时,对起重船的深水投放能力要求较高,投放条件受到限制;
(3)现有设备水下钻机的定位、调向能力欠缺,作业精度和效率受到影响;
(4)攻泥器的顶推力和囘拖力偏小,不适用于较硬地质。
考虑国内外连续管设备制造企业的设计制造能力,以及救捞系统对于水下导向攻泥器的应用需求,提升改进水下导向攻泥器的性能势在必行,需要在原有技术基础上结合作业经验,进一步提高设备的作业能力及可靠性,以满足更加复杂和困难的作业工况。
3水下导向攻泥器改进方案
3.1功能定位
以“反应快速、处理高效”为目标,提出水下导向攻泥器改进方案,保障大吨位、大深度沉船的快速清除打捞,提高深水沉船打捞效率。
3.2功能要求
攻泥器系统应包括但不限于以下功能:①系统布放回收功能;②钻机水下固锚功能;③钻杆自动进退功能;④钻具遥控导向功能;⑤钻头导航定位功能;⑥液压驱动/控制功能;⑦水下传感与监视功能;⑧钻机姿态控制功能;⑨钻头自动保护功能;⑩系统冗余保护功能;
水下本体控向功能。
系统作业时,利用专用的水面布放系统将水下攻泥器本体安放到沉船附近的河、海床上,布放期间可通过水下本体自带的推进器姿态调整系统对攻泥器艏向进行精确控制,确保坐底时钻具艏向与作业方位保持一致。船上操作人员通过遥控操作将本体进行海底锚固,防止本体在作业过程中移动,并通过遥控操作将钻机、钻具等调整到预定的工作位置。工作时,钻杆在河、海床攻泥钻孔穿越沉船底部,由潜水员将一根直径20~25毫米的钢缆连接在钻具上,或通过扩孔器将48毫米钢缆系在钻具上,攻泥器将该钢缆回拖至开孔起始处。
3.3性能要求
(1)最大工作水深:为满足公益辖区范围内沉船打捞要求,将打捞作业攻泥器最大工作水深设计为200米。
(2)工作海况:4级海况,3节流速。钻机模块的固定须能防冲刷和抗沉陷。
(3)适应地质:适应淤泥、粘土、砂质、硬土等地质条件。具备对10万吨级的大型沉船完成水下攻打过底千斤洞的能力。钢丝穿越长度以沉船宽50m计、沉船埋深8m以内(不含淤泥层)并富有余量,水下导向攻泥器钻杆长度150m。
(4)考虑千斤穿引及回扩功能,钻具出土口可连接直径48mm的回拖牵引缆,或连接400mm以内扩孔器用于扩孔直接拖引钢丝绳。
(5)水下运动部件均以液压动力,钻机额定回拖力不小于45吨,额定顶推力不小于22.5吨。换向器扭矩达到2000Nm。
(6)打捞工作母船可监视攻泥器的运动轨迹,钻杆在水底的穿入及穿出点的位置可控。
(7)水下本体艏向控制误差不大于±1°。
(8)脐带缆/软管绞车为恒张力绞车,容绳量不小于250m,配置脐带缆/软管长度不小于250m。
(9)系统可拆装,且拆解后各模块尺寸应满足公路运输的限制要求。
3.4系统组成
根据空间分布,可将水下攻泥器系统分为水面支持系统、水下本体系统和脐缆系统三部分组成。
(1)将“布放回收、配电系统、水面监控监视系统、操纵控制、泥浆混合、脐带卷筒”等功能单元放在船舶甲板上,形成攻泥器的水上支持系统。
(2)将“水下锚固、钻杆推进、水下监控系统、液压系统、导航定位、姿态调控”等功能单元放在水下,形成攻泥器的水下作业系统,工作主机设计成全液压驱动的水下挤压钻机。
(3)水下本体系统和水面监控动力系统由脐带连接,以完成强电动力、高压泥浆的输送,以及各种操纵控制信号、姿态控制信号、摄像监视信号以及姿态传感信号的实时上下传输。
根据功能及系统组成,水下攻泥器系统主要由如下几个部分组成:①A型架布放系统;②水面监控动力站,包括水面监控系统和高压供配电系统;③脐带缆绞车;④泥浆软管绞车;⑤泥浆混合系统;⑥泥浆泵;⑦甲板泵站;⑧水下攻泥器本體。
系统组成关系如图9所示。
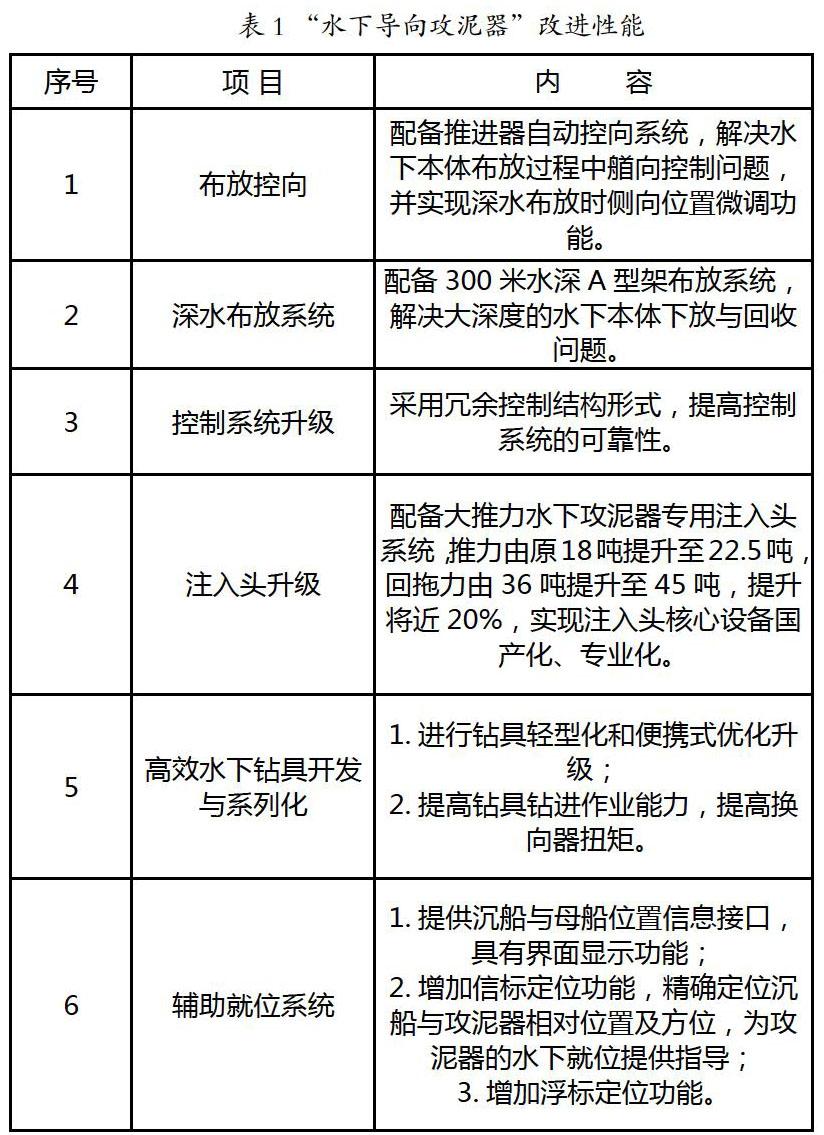
3.5技术升级内容
通过对现有攻泥器性能及使用情况的研究,结合沉船打捞的经验,优化升级形成“水下导向攻泥器”改进版。增加的主要性能有:
