基于三维视觉重构技术的船载土石方体积测量方法
2020-12-23唐印徐天畅张伟雷鹏李园常留红
唐印 徐天畅 张伟 雷鹏 李园 常留红

摘 要:为提高船载石料体积测算的效率,基于无人机三维视觉重构技术的体积测量方法,分别对50米、80米和100米三种飞行高度,采用纵向回字形和横向回字形两种拍摄线路拍摄,利用ContextCapture软件对图像数据进行特征提取、点云重构、三维模型重构,通过体积换算公式计算得到石料的总体积。结果表明,基于无人机技术的测量方法误差较小,能满足工程精度要求,同时具有速度快、效率高、对施工干扰较小等优点。
关键词:体积测量;无人机;三维重构;石料体积;特征匹配
中图分类号:TP23 文献标识码:A 文章编号:1006—7973(2020)11-0084-03
1 研究背景
随着大规模航道建设和护岸工程的实施,大量抛石工程需要用到相当数量的石料,石料交付使用前中需快速对石料的体积进行测量估算,以确定材料成本和抛石方量[1]。由于抛石需求量巨大,且运输船船体吨位型号不一,传统的人工测量方法费时费力,效率低下,对施工干扰较大。
为此,基于无人机视觉运动重构技术,通过无人机搭载的摄影平台,从不同的角度进行数据的采集,快速、高效获取丰富的数据信息,真实地反映客观情况,极大提高了测算效率[2]。并研发一套基于无人机视觉重构的船载石方测算系统,对抛石料的体积进行测量估算。与传统方法相比,基于无人机视觉重构的石方测算方法能够提高石方验收的工作效率,有效减少了对施工现场的干扰。
2 无人机技术和三维重构技术
2.1航拍方式
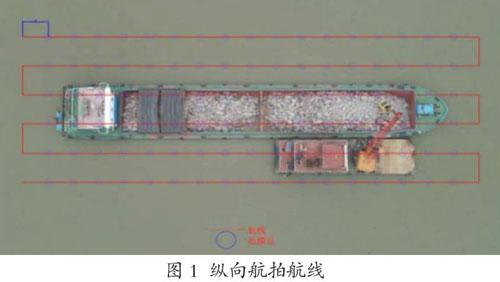
为了解无人机航拍船載堆石方案的可行性,对无人机航拍模式进行研究,包括拍摄航线、飞行高度、拍摄角度。拍摄航线包括纵向拍摄回字形和横向回字形拍摄,见图1所示。飞行高度分低(50米)、中(80米)、高(100米);拍摄方式为单镜头垂直拍摄。航拍设备为大疆精灵4 Pro,通过普通数码相机获取影像数据大大降低了实际应用成本,而且能获取清晰的三维边缘轮廓[4]。
2.2图像采集
图像数据采集是对物体进行三维重构的最重要的一步,contextcapture通过上传的图像数据进行分析,生成点云需要图像有适当的重叠度,来精确地还原物体[8]。因此,图像数据采集的好坏关系到模型的好坏。确定合理的图像采集方案能够有效地提高模型质量。
图像采集时,应该至少从三个不同的视角拍摄需要被重构的物体,相邻每张图像的重叠区域通常需要超过2/3。为了获得最佳重构效果,可采取垂直拍摄与和倾斜拍摄相结合的方式[9],并提前计划飞行航线。此次航拍采用垂直拍摄方式,采集了深舱舶现场施工的图像共计137张,涵盖50m、80m和100米三个拍摄高度。
2.3数据分析和模型重构
2.3.1相机标定
对三维重构的数据处理的第一步,就是相机标定。广泛使用的是张正友[12]提出的二维棋盘标定方法,该方法精度高、经济性好,适用于无人机的相机标定。相机标定目的是了解计算相机的内参数和畸变参数。二维棋盘法将要拍摄的物体和图像看作处于一个棋盘,在世界坐标中Z=0,以左上角为坐标原点,那么棋盘上的每个点的实际坐标(X,Y,Z)为已知。在图片的像素坐标中,也是以左上角为坐标原点,棋盘上的每个角点坐标(x,y)也已知。
2.3.2特征点提取与特征匹配
进行图像数据采集后,通常会有一些无效的无法利用的数据,通常会造成计算机的计算负担,因此通过特征点提取将包含大量冗余的照片转换成只包含关键信息的特征点。
特征点提取是计算机视觉和图像处理中的关键,提取特征点是将影像上的具有某种性质的点作为共轭实体,通过计算特征点之间的相似程度来识别共轭实体能否进行匹配。因此这些点一般要具有一定的灰度值或同其他点具有一定的位置关系等。特征点可以是物体的圆心、角点、建筑物的边缘点等[13]。为了有效匹配,这要求我们提取出来的特征点具有较强的适应能力。
特征匹配就是要在两幅图像之间建立尽可能多的匹配点对。特征点匹配领域的研究者提出了许多不同的匹配方法,不同的方法有着各自的优点和局限性。特征匹配使用的方法多数为经典的灰度相关性算法、松弛法、极线约束等等。基于特征的匹配方法通过提取图像的显著特征,尽可能的压缩了图像的信息量,运算量较小,匹配的速度较快,充分利用了图像之间的相互约束关系,能尽可能多地利用图像的结构信息,在处理细节较少的景物时比较可靠,特别是在处理影像有不连续、阴影与被遮挡时能达到比较好的效果。
2.3.3 空中三角测量
空中三角测量是以图片上测量的像点坐标为基础,采用严格的数学模型,根据最小二乘法原理,用少量地面控制点为平差条件,在电子计算机上求解测图所需控制点的地面坐标。空中三角测量时双像解析摄影测量的扩展,后者以一个相对坐标为计算范围,根据两张图片的内在几何关系,用一定数量的控制点求解待定点的地面坐标,空三是将计算范围扩大到一条航线或多条航线,可根据少量的控制点进行加密计算,求得加密点的高程和平面位置。
在ContextCapture软件中导入137张航拍照片,进行空中三角测量,空中三角测量见图2,经计算得到的结果见图3。
2.3.4三维点云及点云构网
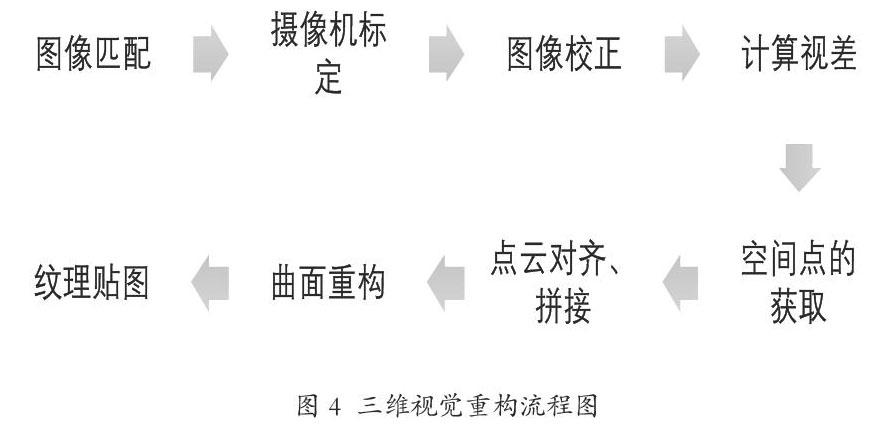
点云三维显示技术一般有两个部分,点云表面重建和点云重投影。三维重构的第一步是得到视差图,再根据视差图计算出点云图的三维信息,即为三维点云重投影的过程。三维信息数据只是空间中离散的点,并不能描述现实场景中各个物体之间的相互关系、相互位置,因此需要进行三维表面重构,就是为了区分环境中的物体并将离散点云集合重构到物体表面。重建的过程步骤如下。
空间三角测量完成之后,进行图像重建,获取其三维点云,重构结果见图5所示。其中,图5(a)为无贴图点云图像,图5中(b)为有贴图点云图像。纹理是识别的重要因素之一,可根据它判断物体的细节。
2.3.5航拍图像重构结果
在点云网格基础上,还可以进一步获取船体的三维重构图像,以获得高度真实感的模型,重构结果见图6所示。
3 土石方的测算
根据体积测量原理(见图7),重构图像无法直接获取船舱内部抛石料的体积,只能获取抛石料表面到船舱上表面之间的体积,然后再根据船舱尺寸进行体积换算,即抛石料总体积等于船舱总体积减去填方体积,再加上挖方体积。
根据图7的计算示意图,得到抛石料体积计算公式:
(1)
根据重构得到的三维视图,选择深舱驳货仓顶部的四个角点,程序能自动计算得到填方体积V1=1045.90m3和挖方体积V2=6.61m3,见图8。
根据船舱体型参数(长41.6m,宽10.7m,深6.13m),计算得到船舱总体积V0=2728.59m3。将V0、V1、V2代入公式(1),得到抛石料总体积为1689.30 m3。根据现场实测结果,抛石料总体积约为1600 m3。计算结果表明,航拍测算结果与现场测量结果非常接近,誤差为5.6%,可见,现有航拍平台和分析方法的测算精度较高,能满足实际使用要求。
4 结论
针对航道整治中的抛石料体积测算需求,提出了一种通过无人机航拍方式快速获取石料体积的方法,提高了测量效率,减少对施工现场的干扰。得到如下结论:
(1)在航线提前规划的前提下,无人机航拍速度较快,对施工现场干扰较小,能节省人力,提高了测量的效率;
(2)从航线策划、图像采集、生成点云、三维重构等方面可以看出,实施效果满足工程的实际需求,在重构模型的过程中,由于自动化程度高,大大提高了三维重构的速度,能提高土石方验收的效率;
(3)测算结果与实测结果对比,该方法测算误差约5%,总体误差较小,现有航拍平台能满足工程精度要求。
参考文献:
[1]孙可朝. 芜申线高淳段航道整治工程经济性研究[D],武汉理工大学,2010.
[2]杨国东,王民水.倾斜摄影测量技术应用及展望[J].测绘与空间地理信息,2016,39(01):13-15+18.
[3]高尚. 基于无人机的小流域地形提取技术[D]. 华北水利水电大学,2017
[4]李畅,李熙,朱爱琴,李奇.城市建筑物框架轮廓三维自动重构研究[J].计算机工程与应用,2011,47(08):4-6+10.
[5]谢榛. 基于无人机航拍图像的室外场景三维重建技术研究[D],浙江工业大学,2014.
[6]李鲜. 无人机三维立体重构与物体识别系统研究与实现[D],湖南大学,2017
[7]郑盼. 基于Smart3D软件的无人机倾斜摄影三维建模及精度评价[D],成都理工大学,2018
[8]王文敏,王晓东.基于ContextCapture Center平台的城市级实景三维建模技术研究[J].测绘通报,2019(S1):126-128+132.
[9]周杰.基于倾斜摄影测量技术构建实景三维模型的方法研究[J].价值工程,2016,35(25):232-236.
[10]毕凯,赵俊霞,丁晓波,刘飞.倾斜航空摄影技术设计与成果质量检验[J].测绘通报,2017(04):71-76.
[11] 马如进,董一庆,潘子超,潘玥.基于消费级无人机的古桥三维重构分析[J].华南理工大学学报(自然科学版),2019,47(6):94-100+126.
[12] ZHANG Z Y.A flexible new technique for camera calibration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(11):1330-1334.
[13] 高尚.基于无人机的小流域地形提取技术[D],华北水利水电大学,2017.
