脑瘫患儿爬行训练架设计及分析
2020-12-23姜吉光王楚超张文杰
姜吉光, 王楚超, 张文杰
(长春理工大学 机械工程学院,长春130022)
0 引 言
脑瘫(Cerebral Palsy,CP)是一种因非进行性脑损伤所导致的神经发育障碍性疾病[1]。而小儿脑瘫是指婴儿在脑发育尚未成熟的阶段由于脑瘫所致的以姿势各运动功能障碍为主的综合征。临床上小儿脑瘫种类可分为手足徐动型、痉挛型、共济失调型,同时伴随着无意识动作增多、四肢僵硬、肌无力且无法保持身体平衡等特征。统计数据显示,目前全球脑性瘫痪患儿超过1200万。我国脑性瘫痪患儿超过600万。小儿脑瘫严重影响患儿的身心健康,给家庭和社会带来沉重负担,因此脑瘫患儿的治疗与康复尤为重要[2]。
爬行作为婴儿期具有里程碑意义的位移活动[3],是步态以外最具代表性的移动方式。儿童典型爬行方式包括手膝式、手足式、匍匐式、快速式等。其中手膝爬行模式是最为常见的爬行方式[4]。对脑瘫患儿进行爬行训练可以明显改善其运动功能[5]。目前的爬行训练疗法,主要包括Bobath技术和Vojta技术中的R-K法,以及配合爬行辅具进行训练[6],能够阻止患儿异常姿势的发展、防止肌肉萎缩和关节痉挛、促进脑组织发育,进一步提高患儿的生存质量[7]。
传统训练需要在人工辅助的情况下进行,且疗效长、效果不明显、治疗费用高。借助训练设备进行康复训练已成为发展的必然趋势[8],针对上述存在问题,设计一种具有爬行训练功能的爬行架,模拟四肢交互训练模式中的四爬训练,采用末端执行器的牵引方式,在康复训练机构的带动下,模拟普通婴儿手膝爬行规律,进行康复训练,同时通过调节摇杆长度可以改变患儿的爬行步距,为患儿提供个性化康复训练。
1 机构设计
运用SolidWorks三维软件创建爬行架的人机模型如图1所示,机械结构主要包括安装于爬行架下侧的康复训练机构、机械传动系统和适应性调节机构。同时设计了下颚牵引带缓解了患儿颈部肌张力亢进,设计了手部托板、腿部缓冲型限位夹套,抑止其异常爬行姿势,促进正常爬行方式的培养和恢复。此外,为满足患儿精细化、个性化康复训练的需要,该爬行架针对不同年龄段的婴儿设计了适应性调节机构。下面对主要组成机构进行具体介绍。
1.1 康复训练机构
根据婴儿的爬行规律[9],爬行过程中其手部与膝部的运动轨迹均呈弧线型,考虑到患儿在进行原地爬行训练时,身体驱干保持中立位,根据相对运动原理患儿手部呈封闭曲线轨迹,膝部呈弧线运动轨迹。
康复训练机构中,左右侧机构结构对称,下面以左侧康复训练机构为例进行具体介绍。图2所示为手臂训练机构与腿部训练机构的机构运动简图。其中,摇杆均由可变长度的电动推杆充当。

图1 人机模型
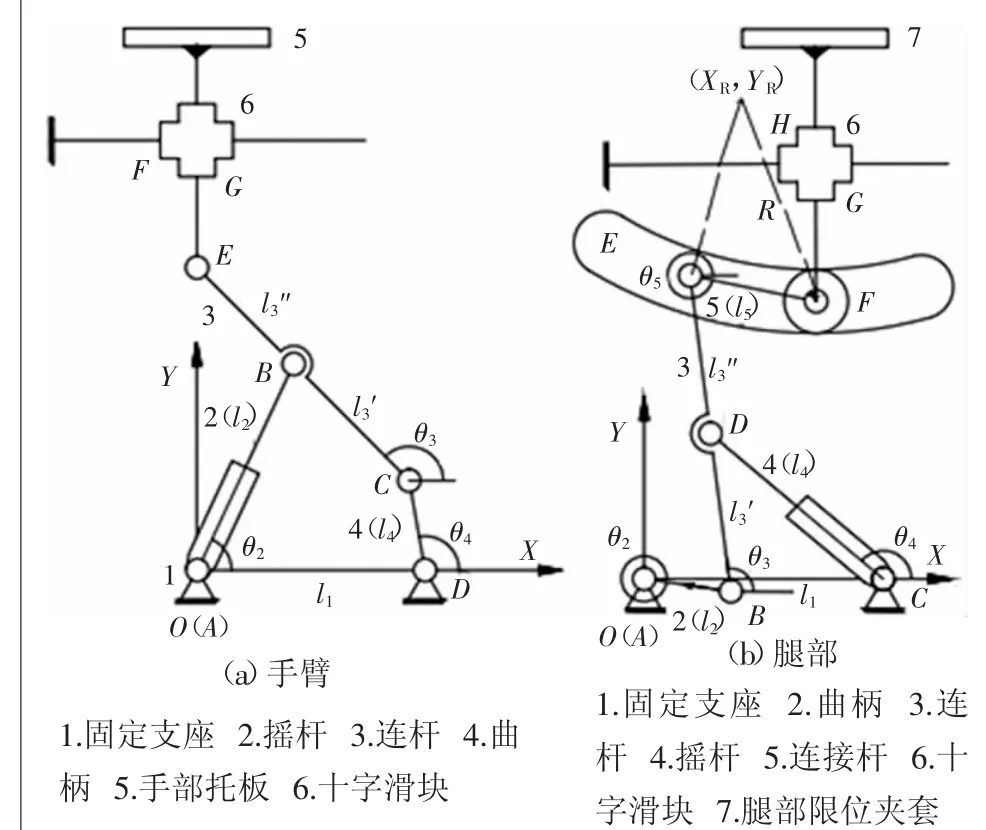
图2 手臂、腿部训练机构运动简图
手臂训练机构由切比雪夫连杆结合十字滑轨组成,通过曲柄转动,带动摇杆摆动,使连杆3末端近似成一“面包型”封闭曲线轨迹,在手部托板5带动下,患儿进行爬行训练。通过调节电动推杆长度可以改变患儿实际手部的运动轨迹,进一步改变患儿手部的水平与竖直方向的位移,方便患儿进行不同程度的训练。
腿部训练机构的主要执行机构仍为四连杆机构,不同之处在于,连杆5的末端铰接轴承,轴承一方面与U形槽采用线面接触的高副连接方式,另一方面轴承与滑轨铰接。曲柄2的转动带动连接杆5做平面运动,推动轴承沿U形槽做纯滚动,通过十字滑轨进一步带动腿部限位夹套完成弧线型运动轨迹。与手臂训练机构类似,通过改变电动推杆长度,可以调节患儿膝部的运动参数。
1.2 机械传动系统
图3所示为传动系统的机构示意图。86系列步进电动机通过同步带轮将动力传递给主轴,主轴上固定有齿轮,通过齿轮与不完全齿轮间的啮合将运动分别传递给左、右侧的康复训练机构,通过设置不完全齿轮的初始摆放角度,实现齿轮1、4运动的同时齿轮2、6保持静止;齿轮2、6运动时,齿轮1、4保持静止。该间歇机构的设计实现了患儿身体对位侧肢体的轮换运动,模拟婴儿手臂与膝部的伸展姿态,达到患儿手膝式爬行运动要求。
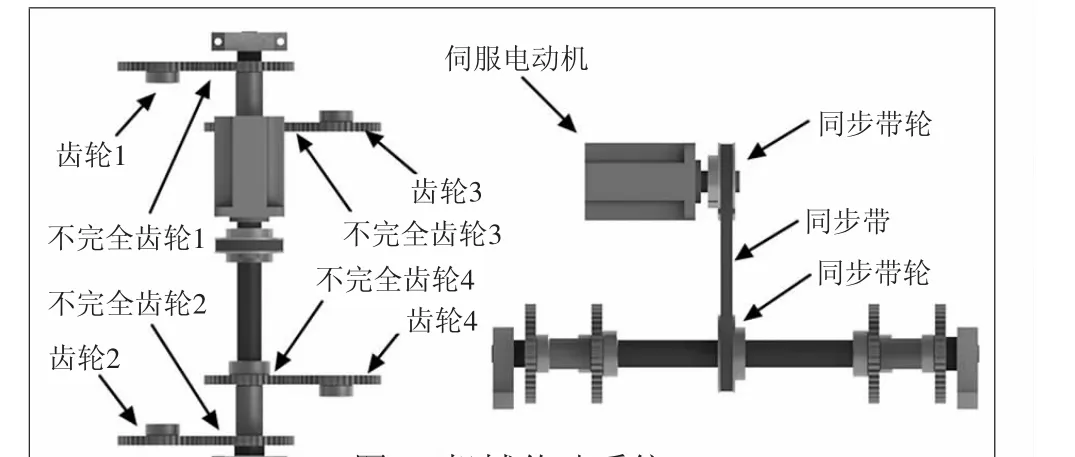
图3 机械传动系统
1.3 适应性调节机构
适应性调节机构主要包括调节滑轨、调节滑块、锁紧扳手和滑轨卡块。当逆时针转动锁紧扳手时,滑轨卡块与调节滑轨之间呈脱离状态,调节滑块可在调节滑轨上自由移动,从而实现脑瘫患儿手臂与手臂、腿部与腿部之间距离的调节,从而适应肩部宽度不同的脑瘫患儿;当锁紧扳手顺时针转动时,滑轨卡块靠近调节滑轨,调节滑块与调节滑轨保持相对静止,调节滑块紧锁不能移动。手臂、腿部训练机构中的适应性调节机构原理相同,如图4所示。
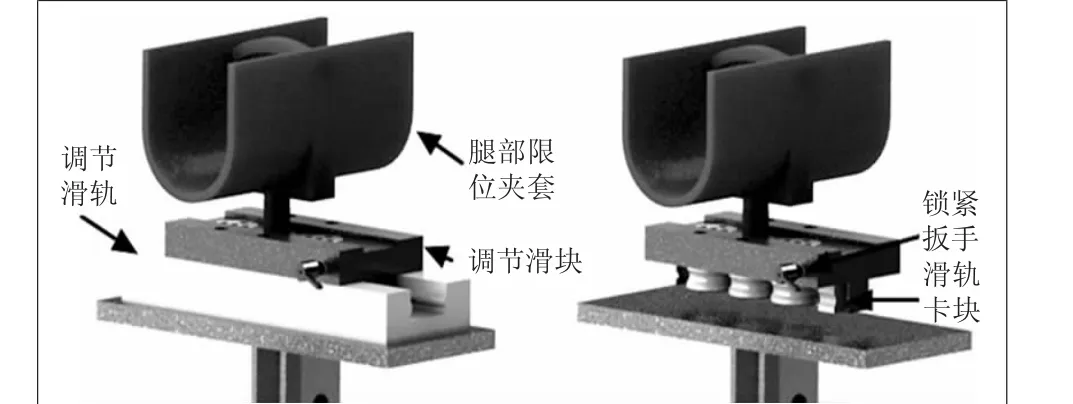
图4 适应性调节机构
2 运动学分析
通过对康复训练机构进行运动学分析,理论计算手掌托板和腿部限位夹套的位移、速度表达式,分析影响其运动变化规律的运动参数,通过合理设置参数,验证得出合理的整体机构设计,确保脑瘫患儿的爬行训练达到预期的康复效果,有利于病情的康复。
2.1 正运动学分析
对手臂训练机构进行正运动学分析, 图2中由闭环矢量关系经欧拉公式展开可得:

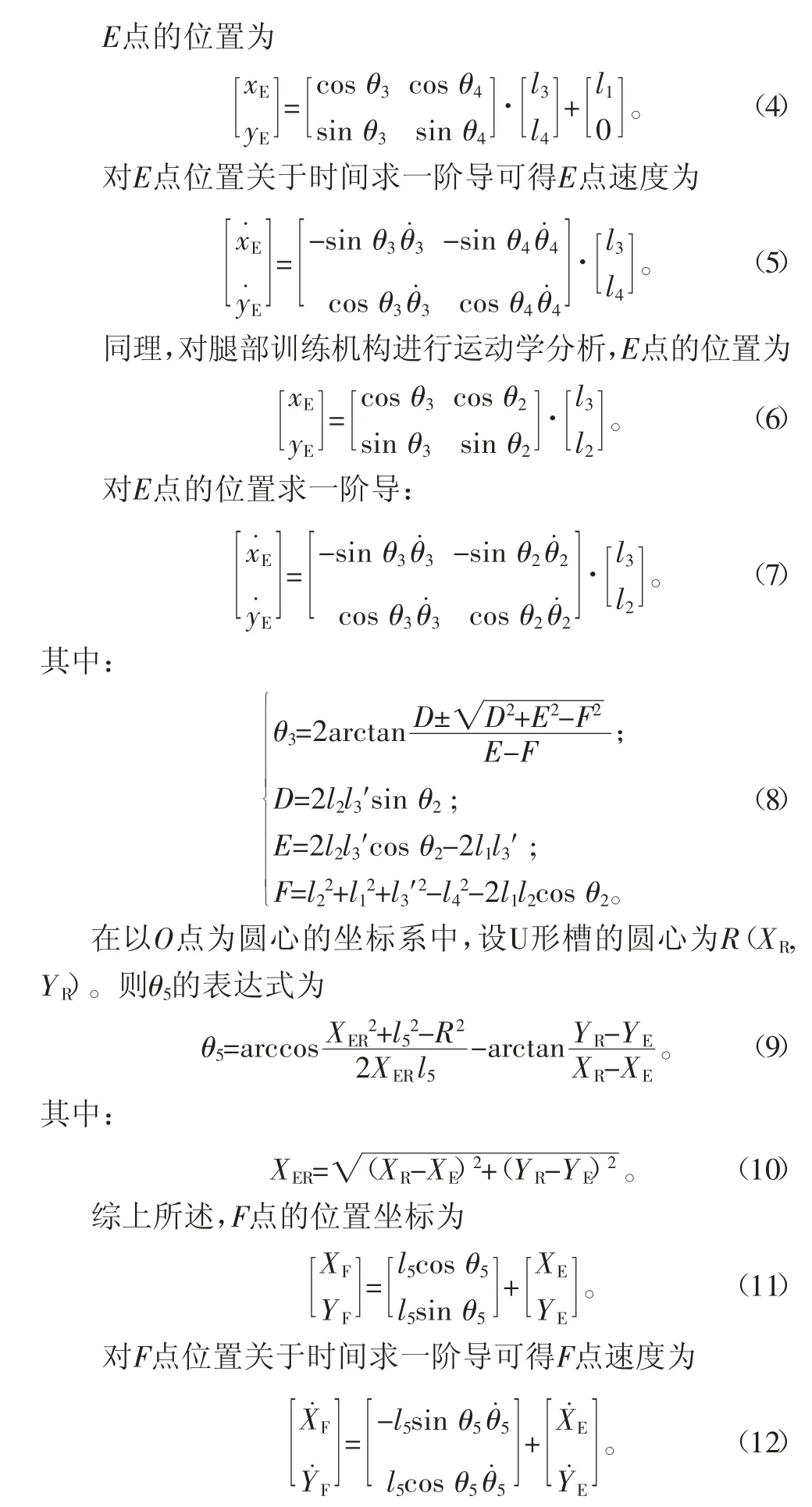
通过对康复训练机构的运动学分析,得到末端执行器位置坐标式(4)、式(10),并结合式(3)、式(8)可知,患儿手部和膝部的运动轨迹与康复训练机构中的摇杆长度和曲柄的瞬时转角有关,通过调节电动推杆长度可以改变患儿的运动参数。
2.2 摇杆长度的影响
为对患儿手部与膝部位移起到适应性调节的作用,手臂训练机构与腿部训练机构中的摇杆均由电动推杆充当。通过控制电动推杆的伸出长度能够灵活、方便地调节摇杆长度。以5 mm为长度间隔,摇杆长度为90~130 mm的患儿手部仿真运动轨迹如图5所示。
同理可对腿部训练机构进行分析,同样以5 mm为长度间隔,摇杆长度为80~110 mm的患儿膝部仿真运动轨迹如图6所示。
摇杆长度不同,对应的患儿手部与膝部的运动轨迹会发生变化,具体体现为患儿手部的最大水平、垂直位移和患儿膝部的最大水平、垂直位移会发生相应改变。

图5 不同摇杆长度对患儿手部轨迹的影响

图6 不同摇杆长度对患儿膝部轨迹的影响
由图5可知,患儿在进行康复训练时手掌的运动轨迹均呈一近似“面包型”的光滑、连续封闭曲线。如图7所示,手部最大水平、垂直位移与摇杆长度间没有明显的比例关系,由图5可知,当摇杆长度为125 mm、130 mm时,轨迹最下端出现“尖点”,患儿手部在回程过程中会出现明显的“顿挫感”,因此在调节过程中应避免摇杆长度处于该范围内。摇杆长度越小,轨迹曲线的平滑度越好。
同理,随摇杆长度变化,患儿膝部的运动轨迹呈弧线型(如图6),当摇杆长度从80~110 mm变化过程中,患儿膝部的水平位移与垂直位移也随之增大,当摇杆长度为110 mm时,患儿膝部的最大水平与垂直位移分别为108.41 mm和52.74 mm。可知患儿膝部的运动参数由轴承与腿部训练机构U形槽的接触区域决定。通过合理调节并组合两组机构中电动推杆的长度,达到患儿训练所需的强度要求。
3 结 语
本文以普通婴儿正常爬行姿势下手掌和膝部协调运动规律为设计目标。基于辅助爬行训练器械爬行架,设计了一种具有爬行训练功能的新型脑瘫康复辅助器械。对康复训练机构进行运动学分析,规划患儿手部和膝部的运动轨迹,从理论上证明了爬行架手臂和腿部训练机构帮助患儿实现爬行运动的可行性。通过调节摇杆长度,可对患儿的实际运动轨迹和运动位移进行相应调节,可针对不同患儿的训练需求进行个性化康复训练。
