基于MRAS的永磁同步电机无传感器矢量控制系统
2020-12-23赵俊杰刘旭东
赵俊杰 刘旭东 肖 朋
(营口职业技术学院机电工程学院,辽宁营口115000)
0 引言
永磁同步电机(PMSM)具有功率因数高、力矩惯量比大、体积小、重量轻、结构简单等诸多优点,现已逐步取代直流电机,且在机器人、工业生产、数控机床等各个领域被广泛应用。然而,在传统的控制方法中,通常利用各种传感器(例如光电编码器)来精准采集转子的位置以及速度等信息,并通过信息反馈来构成一个闭环控制系统,从而使得永磁同步电机传动系统具有较好的控制性能。但是,传感器的安装在实际应用中存在着一系列问题,例如会使系统成本提高、占用空间、不利于系统小型化、不适用于一些集成度要求较高以及特殊的环境等。因此,基于电机绕组中的电信号实现对转子的位置和速度进行估计的永磁同步电机无传感器矢量控制系统目前得到了广泛的关注,并且发展非常迅速。基于上述背景,本文对传统的永磁同步电机矢量控制系统进行优化,首先从PMSM的数学模型出发,推导并构建出MRAS的速度与位置辨识算法,再基于该优化算法实现对PMSM的无传感高性能矢量控制。
1 永磁同步电机的MRAS算法
1.1 MRAS算法基本原理
MRAS算法又称为模型参考自适应,它的主要原理:通过选取两个物理意义相同的输出模型来构造出一个误差矢量,这两个模型中一个被称为参考模型,另一个被称为可调模型,再根据这个误差构建出适当的自适应率来调节可调模型的参数,从而使可调模型的输出量能够实时追踪参考模型。并且一旦实际的输出量出现偏离后,该矢量控制系统通过自适应率能够快速进行调整并及时修正。因此,只要保证该系统误差的状态变量收敛到0,即可估算出PMSM的参数。
1.2 系统的数学模型构建
数学模型是针对某种事物系统的特征,采用数学语言或数学表达式刻画出某种系统或研究对象的关系结构,在研究实际问题中具有至关重要的作用。PMSM是一种具有多变量、强耦合的非线性控制系统,为了方便研究和分析计算,本文首先对PMSM进行了坐标变换,在同步旋转的d-q坐标系下建立PMSM的简化数学模型,其电压方程和磁链方程分别如式(1)和式(2)所示:

式中:ud、uq分别为电机在d轴和q轴上的电压;id、iq分别为电机在d轴和q轴上的电流;Ld和Lq分别为定子在d轴和q轴上的电感;R为定子电阻;p为微分算子;ωre为转子旋转电角速度;ψf为永磁体磁链。
由式(1)和式(2),可以得到简化后的PMSM电流方程,如式(3)所示:
由式(3)可以看出该电流方程与PMSM的转速相关,故可以把其中不含有位置参数的PMSM电机本身视作参考模型,把含有待估参数的电流模型视作可调模型,并将这两个模型以并联的方式连接。假设可调模型可以简写为:

根据以上两个模型的选取,可以定义误差矢量如式(5)所示:

要想保证该矢量控制系统的稳定性,需要同时满足波波夫(Popov)不等式的超稳定性原理的条件,再根据稳定性分析验证,最后可以得到PMSM的转子速度以及位置的辨识算法,求解后可得式(6)和式(7):
式中:k2为比例增益参数;k3为积分增益。
2 PMSM无传感器矢量控制系统的实现
该系统采用双闭环控制方式,其中速度环为外环,电流环为内环。根据上述推导的基于MRAS算法下永磁同步电机转子位置以及转速计算式(6)和式(7),同时结合PMSM的矢量控制策略,构建该控制系统的结构框图。在仿真软件平台中,按照文中所设计的永磁同步电机无传感器矢量控制系统结构框图搭建仿真模块,并对其系统可行性进行仿真验证。在仿真模块中所选用的永磁同步电机相关参数如下:额定电压UN=380 V;额定功率PN=1 kW;额定频率f=50 Hz;极对数为2;定子电阻R=1.93 Ω;d轴电感Ld=42.44 mH;q轴电感Lq=79.57 mH;电机惯量Jm=0.003 kg/m2;磁链系ψf=0.311 V/(rad·s);额定转速n=3 000 r/min。
PMSM转子估计速度与转子实际速度的仿真图如图1所示,根据在Matlab/Simulink仿真环境下的结果图可知,当电机初始给定转速为1 500 r/min且空载时,电机启动速度很快,虽然在PMSM刚启动时转速稍微有一些误差,但很快电机便进入平稳运行的状态,此时估计转速和实际转速逐渐趋同,误差基本趋于零。当电机运行到0.025 s时,在外加突变干扰电磁转矩Te=5 Nm的瞬间,PMSM的转速发生波动,导致转速微降。但经过大概0.002 s的一小段时间后,PMSM又进入稳定状态,估计转速与实际转速又恢复逐渐趋于一致。因此,仿真试验结果可以表明,该MRAS算法在PMSM矢量控制系统具有可行性和有效性,同时也验证了PMSM矢量控制系统具有响应速度快以及较好的稳定性能等优势。
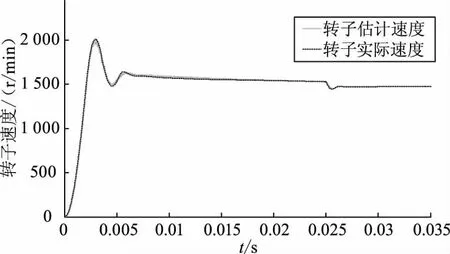
图1 PMSM转子估计速度与转子实际速度的仿真图
3 结语
在传统的永磁同步电机运动控制系统中,往往使用机械式的传感器来采集检测电机的转子位置和速度等信号,以此来提高系统的控制性能。传感器虽然能够精确检测到系统所需要的各种信息,但同时也存在一系列问题,比如在集成度要求较高的系统中,传感器的安装会占用一定的空间,增加系统的整体重量,不利于系统的集成化。为了优化PMSM的矢量控制方法,本文提出了一种基于MRAS算法的永磁同步电机无传感器矢量控制系统。该控制系统具有结构简单、便于分析和计算等诸多优点。本文使用Matlab/Simulink仿真软件对其进行验证,验证了该算法的有效性和可行性。永磁同步电机在空载启动时响应速度非常快,并且在突加负载干扰的情况下,PMSM的输出转速与给定转速虽然在突加干扰的那一瞬间会有微小的波动产生,但在很短的时间段内电机的转速便能够快速恢复并达到稳定状态。因此,该系统具有良好的跟踪特性,且控制精度高、响应速度快、抗扰动能力强。
