一种配电网高低压开关操作机器人的研制及应用
2020-12-23牛景光李国成冯忠奎颜炳辉郭杰婷
牛景光 李国成 冯忠奎 颜炳辉 郭杰婷
(国网山东省电力公司淄博供电公司,山东淄博255000)
0 引言
分合断路器或负荷开关是配网停电检修工作中最危险的环节,根据当前状态检修和供电可靠性要求,停电检修时间被压缩,运行人员难以掌握开关的健康状况。但是,配网中不带远方遥控功能的设备仍占绝大多数,分合此类设备时只能依靠就地操作方式。配网设备停电检修、新设备投运时,无论是使用电动操作按钮,还是手动操作把手,就地操作配电设备的断路器(配电室高压断路器、配电变压器低压总断路器、环网柜断路器)、负荷开关(环网柜、电缆分支箱)、隔离开关、接地刀闸时,容易引起开关爆炸,电弧伤人的事故时有发生[1-2]。
目前,运行人员在操作开关前尚不能准确判断柜内开关的健康状况,一旦发生开关爆炸事故,只能依赖柜门保护人员的人身安全,但是瞬间爆轰的电弧往往会引燃运行人员,造成人身伤亡事故。另外,开关设备母线或者进线电缆头带电,一旦操作过程中发生了接地故障,工作人员距离设备仅1 m左右,小于《国家电网公司电力安全工作规程(配电部分)》规定的距离,易引发人员触电事故。目前遥控机器人在输变电领域已有应用[3],国内外对配电网高低压开关操作机器人也进行了部分研究,但是它属于专用设备,仅针对某一类型开关柜,适用范围小[4-6]。因此,研制一种具有普适性的辅助操作工具,代替工作人员执行分合开关操作,保护运行人员的人身安全十分必要。
本文研制了一种配电网高低压开关操作机器人,针对目前配网检修中的分合开关过程,可以代替运行人员执行柜前操作,保证人身安全,实现断路器(负荷开关)、隔离开关、接地刀闸的分合操作(旋转一定的角度)和摇入、摇出小车开关的操作,能够匹配多种类型的操作把手操作多类型设备,通过现场试验验证了机器人的可靠性和安全性。
1 高低压开关操作机器人结构与原理
1.1 机器人结构
该机器人集就地电动操作和就地手动操作功能于一体,具备过流保护功能,由遥控模块、电源模块、电动操作模块、手动操作模块四部分组成,总体结构如图1所示。
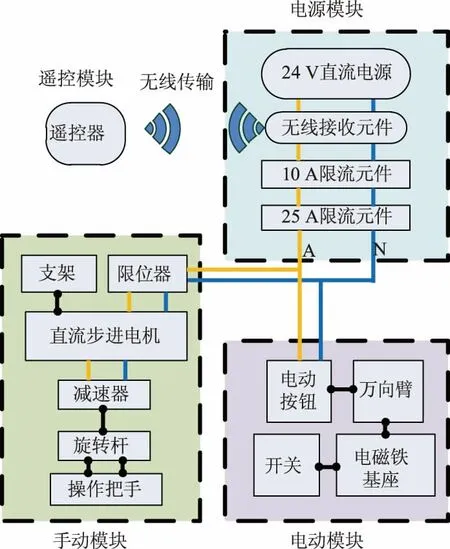
图1 机器人结构
该机器人操作采用无线遥控方式,使用遥控器控制电源模块的通断。电源模块由24 V直流电源、无线接收元件、双限流元件串联组成,其中限流元件采用自恢复式熔断器。电动操作模块由开关、电磁铁基座、万向臂和电动按钮组成。电动按钮与电源模块连接,在电路连通时动作,用以按压配电设备的电动操作按钮;万向臂两端各自连接电动按钮和电磁铁基座,可以360°旋转;开关控制电磁铁基座的磁性。机器人各模块的实体图如图2所示。

图2 机器人各模块实体图
1.2 就地电动操作原理
电动操作原理即遥控机器人电动按钮完成按压动作,代替工作人员按压设备的分合闸按钮;使用电动模块开关控制电磁铁基座磁性,使之可以稳定吸附在柜体表面;将万向臂调整至合适位置,使得电动按钮正对分合闸按钮,使用遥控器开关控制电源通断,从而控制电动按钮完成操作过程。
1.3 就地手动操作原理
就地操作原理即遥控机器人转动部分带动设备操作把手旋转,代替工作人员完成开关分合操作。三足支架提供支撑,并能够调节高度适应不同位置的开关;直流步进电机提供旋转动力,通过减速器输出,转动旋转杆,每次连通电路时自动旋转180°;旋转杆可以匹配多种操作把手,以完成不同类型开关的操作;同时附有限位器,固定限位器至合适角度,当旋转杆旋转角度超过180°自动断开电源。
2 机器人操作方法
高低压开关操作机器人的现场应用,可以根据现场设备情况选择相对应的电动操作方式或手动操作方式。连通机器人电路,设备接地之后,两者操作步骤如下:
电动操作:(1)打开电动操作模块开关;(2)将基座吸附在需要操作的分合闸按钮附近;(3)调整万向臂使得电动按钮正对分合闸按钮,拧紧万向臂螺栓;(4)保持安全距离,按下遥控开关。
手动操作:(1)安装设备操作把手至旋转臂;(2)调整支架至合适高度;(3)根据旋转角度安装限位器;(4)保持安全距离,按下遥控开关。
3 高低压开关操作机器人试验验证
3.1 可靠性验证
本文选取4种类型环网柜,2种类型开关柜进行有效性验证,现场测试如图3所示。
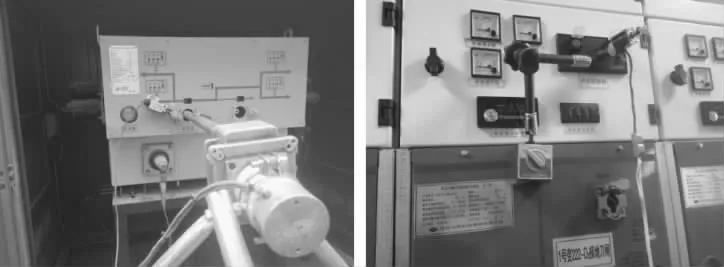
图3 机器人现场测试图
就地电动操作,每种设备测试50次,试验数据如表1所示。

表1 就地电动操作试验结果
根据试验结果可知,电动操作50次全部成功,成功率达100%。
选取不同地点的高压断路器、低压断路器、负荷开关、隔离开关、接地刀闸进行就地手动操作试验,每类开关设备测试50次,试验数据如表2所示。
就地手动操作试验成功次数在48~50次,成功率均在96%以上。两轮试验表明机器人能可靠完成就地操作。
3.2 安全性验证
本文从3个方面验证操作机器人的安全性,包括机器人自我保护、人身安全。

表2 就地手动操作试验结果
3.2.1 机器人自我保护
该机器人电源模块外壳为液态硅橡胶,具有高耐磨性和绝缘性,可以有效保护电源器件。电路设有10 A和25 A双限流元件,可在机器出现故障或其他造成电流迅速增大的情况时断开电路,有效保护机器人组件。本文使用直流电源发生器测试安全性,设置电压为24 V,设置直流电流10~30 A,分别测试50次,记录电路断开结果如表3所示。

表3 电路断开结果
由表3测试结果可知,电流12.5 A以上时,元件可以100%断开电路,电流10 A时成功率为90%,分析认为是因电源稳定性和环境温度引起的差异。设备短路或者旋转机构卡涩时电流均迅速升高,不会稳定保持在10 A,认为电源可以在过流时自动断开,保证机器人电路安全。
如果机器人电机失控一直旋转,不仅损伤机器人本体,也威胁开关设备。因此,设计加入限位器,可以在旋转臂旋转超过180°时自动断开电路,保护机器人和设备安全。
3.2.2 人身安全
机器人操作过程中的人身安全威胁主要来自两方面:设备爆炸和接地故障。
本文经过对多起事故视频和案例进行总结分析可知,设备爆炸主要针对柜门方向并且冲击和火焰衰减明显,对4 m以外或者侧面的人员威胁很小。
根据《国家电网公司电力安全工作规程(配电部分)》规定,室内、室外10 kV设备接地时人员须远离接地点4 m、8 m以上,可以认为配电设备发生接地时室内和室外人员的安全距离为4 m和8 m以外。机器人遥控模块采用红外发射和接收方式,理论最远遥控距离为15 m。固定电源模块,设置5~20 m不同的遥控距离测试机器人动作成功率,结果如图4所示。
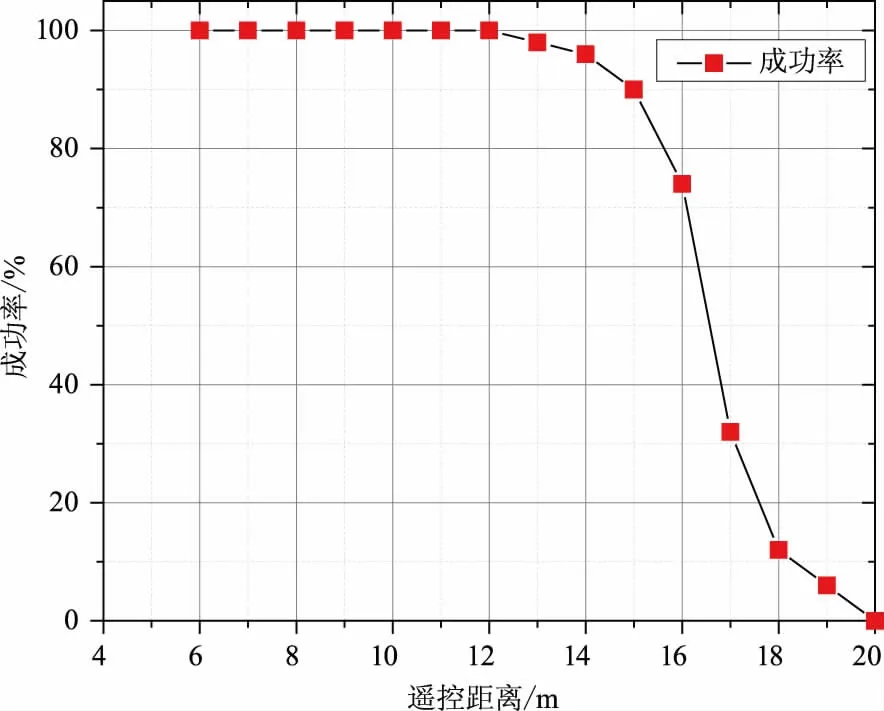
图4 不同遥控距离测试的机器人动作成功率
由图4测试结果可知,12 m内机器人遥控成功率达100%,在室外安全距离以外,可以认为机器人操作能保证工作人员的人身安全。
4 结语
本文创新性研究了一种适用范围广的配电网高低压开关操作机器人,具有以下创新点:(1)可以遥控分合配电网高低压开关电动操作按钮;(2)可以遥控操作手动操作把手分合配电网高低压断路器、负荷开关、隔离开关、接地刀闸;(3)可以遥控摇出或摇入高压开关、低压总开关。此外,本文试验验证了该机器人的安全性和有效性,具备良好的应用前景和推广价值。
