用于双探针原子力显微镜的定位平台的设计及实验验证
2020-12-18林之东高思田
林之东,高思田,黄 鹭,李 琪
(1.浙江理工大学机械与自动控制学院,浙江杭州310018; 2.中国计量科学研究院,北京100029)
1 引 言
双探针原子力显微镜凭借其在线宽测量中可以避免探针尺寸所带来的影响,成为线宽的一种重要测量方式[1,2]。为了实现线宽的高精度测量,需要具有高精度的定位系统保证其对针结果精确。
双探针原子力显微镜在测量线宽之前需要将两个探针在三维方向上对准,以此作为零点; 然后两个探针分别下降,沿着相反的方向上去扫描线宽的轮廓,测量此时相对零点位置,求出线宽真实值。在探针对准方面,国内外众多研究者有着不同的设计,并在装置机构、对准系统、信号处理等不同方面对双探针原子力显微镜进行改进,取得了较好的效果[3,4]。近年来,美国Xidex公司首次提出了同时测量线宽两侧的双探针原子力显微镜的方案[5]。天津大学王龙龙[6]以单测头为基础,搭建了双探针测量系统,实现两探针针尖在100 nm内完成对准。合肥工业大学张华坤[7]利用近场力对准的纳米级对准方法实现了双探计的纳米级对准,对准精度为3 nm。
目前,微动定位平台在结构设计、驱动方法和控制方式上有许多不同的方案。压电陶瓷利用压电材料的逆压电效应,实现电能与机械能的转换。由于其高带宽、高响应和高分辨的特点,是微动平台应用最广的驱动器之一[8~10]。柔性机构通过具有柔性的构件变形而产生位移,具有无摩擦和无配合间隙的特点,可以实现超高的分辨率[11,12]。李庆样等[13]开发了基于柔性铰链的二维柔性微动平台,其运动行程为10 μm,定位精度达0.03 μm。美国密歇根大学的Awtar S等[14]设计了一个基于约束模式的平行运动柔性铰链运动平台,可实现10 nm的运动行程,而交叉耦合误差小于60 μm。
本文设计的定位平台采用柔性铰链作为导向机构,并以压电陶瓷驱动,各个方向位移相互独立,可以实现双探针AFM的精确对针。
2 定位平台的结构设计与分析
为满足双探针原子力显微镜的两根探针精确对准的需求。定位平台需在X轴与Y轴方向上拥有100 μm的行程,在两个Z轴方向上拥有50 μm的行程,位移分辨率为5 nm。两个探针分别固定在两个Z轴上,定位平台需要满足其中一根探针在X和Z方向上能够实现独立的位移,另一个探针在Y和Z方向上能够实现独立的位移。因此,本文设计了如图1所示的机械机构,定位平台采用柔性铰链作为导向机构,PZT作为驱动系统,叠加支链如图1(b)所示,Z轴和X轴结构如图1(c)和图1(d)所示。

图1 机械结构图Fig.1 Mechanical structure
为保证定位平台具有大行程的同时有高分辨率,定位平台加入杠杆放大机构,以弥补压电陶瓷形成小的缺点。X与Y轴结构均采用双柔性平行四杆机构,其支链采用叠加支链结构,见图1(b),以保证在足够大的运动行程时所产生的集中应力较小。双柔性平行四杆机构由两个单柔性平行四杆机构组成。由于双柔性平行四杆机构在结构上存在对称性,当受到外力作用时,两个相互对称的连杆产生相同方向,相同大小的位移,使得运动部分只会产生沿着力方向上的位移,消除其他方向上的微动。为了减小整个机构的尺寸Z轴结构采用单柔性平行四杆机构,当其沿着Z轴方向运动时会产生垂直运动方向的耦合位移,耦合位移随着位移的增大而增大。由于Z轴方向上的位移较小,故单柔性平行四杆机构所带来的耦合位移可以忽略不计。此外,该系统所使用的PZT均在动态情况下工作,为避免PTZ工作中受到惯性力而产生的拉应力,导致其损坏,需使用弹簧对其进行预紧。
3 定位平台的工作刚度和固有频率
3.1 工作位移刚度
假设外力F施加在定位平台上,这使得在平衡状态下沿Y方向上的位移为δ。
由于结构的其他尺寸远大于柔性铰链尺寸,其他机构可视为刚体。柔性铰链中储存的弹性势能为
(1)
根据能量守恒定理可得:
(2)
(3)
式中:θ=δ/L为偏转角;L为连杆长度;kθ为铰链的转动刚度;kX为X轴方向上的工作刚度;lX为X轴铰链长度;E为材料的杨氏模量;b为铰链的厚度h为铰链的宽度。
由式(1)、(2)、(3)可得到X轴工作刚度为
(4)
由于定位平台采用了杠杆机构,所以定位平台的输出刚度:
(5)
同理可得Z轴工作刚度为
(6)
Z轴输出刚度为
(7)
式中:lZ为Z轴铰链长度。
3.2 固有频率
为了在使用过程中适当地调节压电陶瓷驱动器参数以避免出现共振,需要对其固有频率进行分析和计算。为了简化平台的振动模型,可将定位平台视为弹簧-质量系统,因此其固有频率为
(8)
式中:k为位移台固有频率方向上的刚度;m为定位平台运动部分的质量。
4 有限元仿真
选用商业软件ANSYS对定位平台进行了有限元仿真。定位平台所选用材料为SKD11,屈服应力为120 MPa,杨氏模量为210 GPa,泊松比为0.3。定位平台的结构尺寸参数示于表1中。

表1 定位平台参数Tab.1 Positioning platform parameters mm
4.1 静态分析验证
首先,通过ANSYS对定位平台进行静力学分析仿真以验证分析模型的输出刚度。对定位平台施加固定约束,在一个输入端施加F=100 N的稳定力以查看相应的输出位移。静态分析结果云图如图2所示。由静态分析结果可以看出定位平台X与Y轴的刚度为5.46 N·μm-1,和理论计算的相对误差分别为5.5%。Z轴的刚度为2.242 N·μm-1和理论计算的相对误差分别为18%。从有限元模型和分析模型获得的结果之间的比较结果见表2,显示两者之间具有良好的一致性,位移台设计可靠。

图2 静力学仿真Fig.2 Static simulation
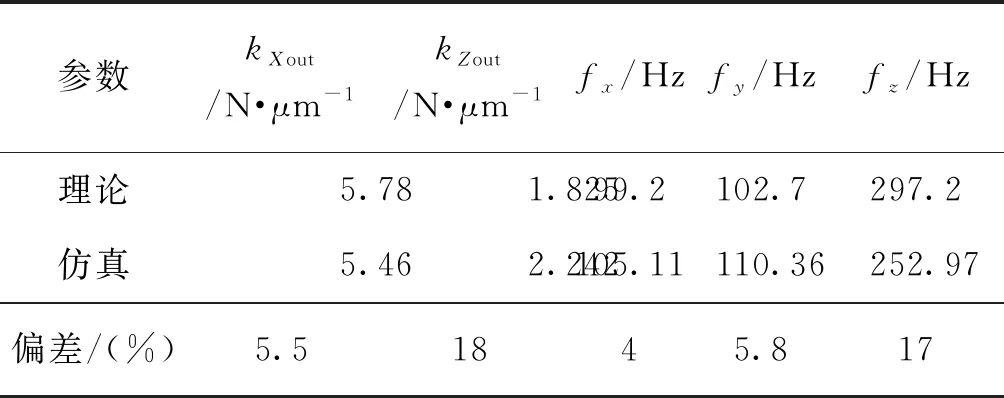
表2 理论与仿真结果Tab.2 Theory and simulation results
4.2模态分析验证
本文主要考虑模特中的固有频率和模态振型,以防止定位平台产生共振。图3显示了定位平台的模态分析结果,分别为定位平台的一阶、二阶、四阶共振频率和振型。定位平台在X、Y和Z方向上的模态频率fx、fy和fz分别为105.11 Hz、110.36 Hz和252.97 Hz。有限元分析和理论计算的相对误差分别为4%,5.8%和17%。定位平台沿X方向和Y方向具有相似的结构,故定位平台沿X方向和Y方向具有几乎相同的谐振频率和动态特性。

图3 模态分析Fig.3 Modal analysis
理论分析和仿真结果存在误差的主要原因有:
(1)理论计算忽略了铰链的伸长、缩短和杠杆的弯曲,将除铰链外均视为刚体;
(2)理论计算时采用的简化力学模型和仿真分析使用的模型不同;
(3)仿真分析的网格划分的紧密程度影响分析结果,且仿真分析过程中采用近似解。
5 实验验证
图4为搭建的定位平台实验装置,采用PID控制来改善压电陶瓷驱动器的动态特性,并进行了初步的测试来验证其性能。输入位移由4个压电陶瓷(PI,P840.1B和PI,P840.2B)提供,其公称位移分别为15 μm,30 μm,刚度分别为57 N·μm-1,27 N·μm-1。电压增益为10的单通道压电放大器(PI,E-505)可以提供-30 V到+130 V的电压。采用测量精度高、测量速度快和抗干扰能力强的电容传感器(MicroSense2805)测量目标输出位移和测量可能的耦合位移[15~17],其检测分辨率为0.43 nm,量程为±100 μm。所有信号均采用16位分辨率的数据采集卡(研华,PCI-1706U)记录。
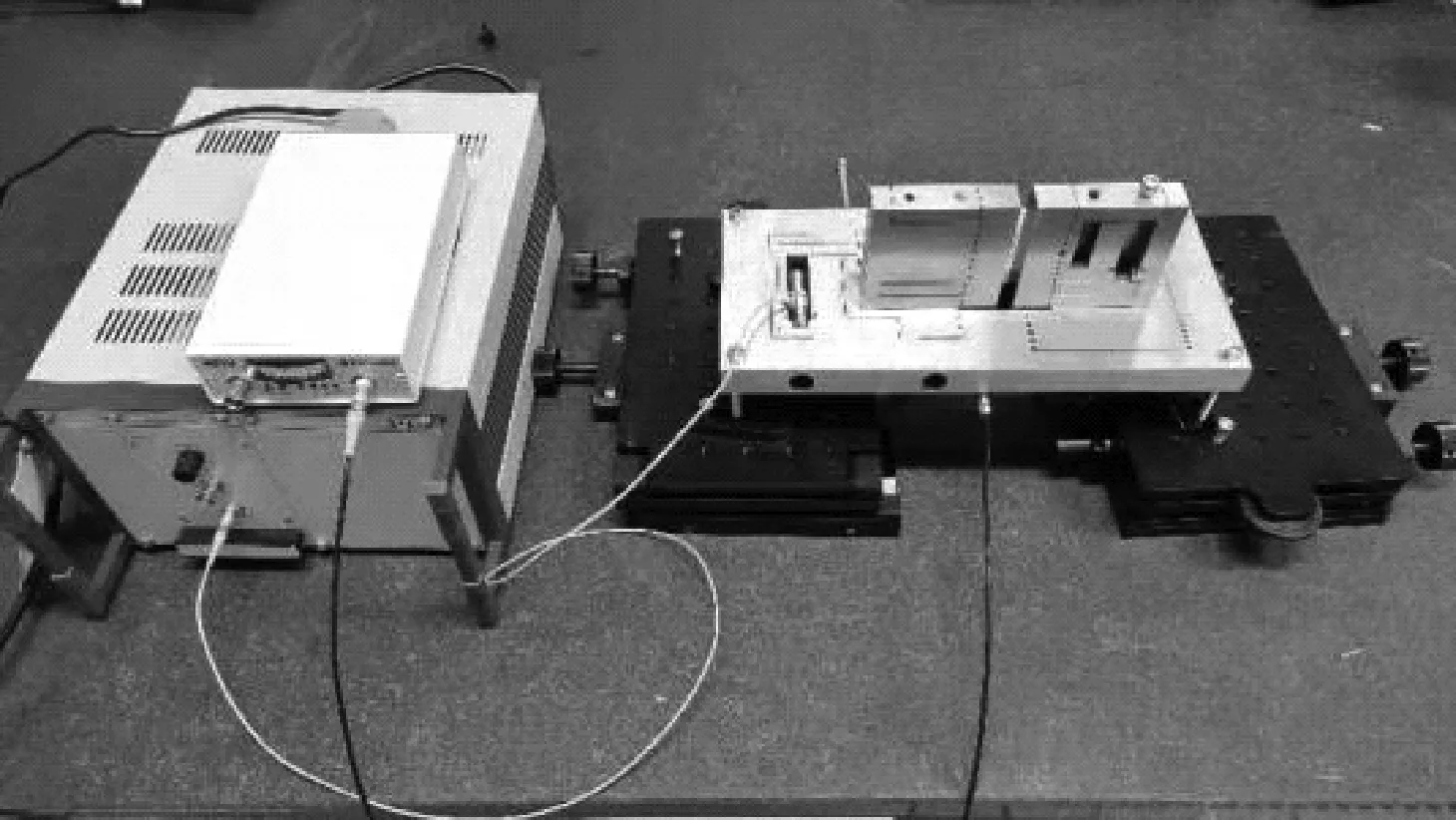
图4 定位平台实验装置Fig.4 Positioning platform experimental device
X与Y轴行程测试系统稳定性测试结果如图5所示。定位平台的读数在±3.4 nm内波动,平均值为1.24 nm。这表明测量系统的稳定性较高。

图5 X与Y轴稳定性实验Fig.5 X and Y axis stability experiments
对X与Y轴行程0到110μm的步进实验数据进行处理,得到拟合的直线,结果如图6所示。定位平台的X与Y轴行程的最大值为110 μm,线性拟合方程为y=1.000 12x-0.002 84。图6显示了实验值与拟合方程之间的误差,最大误差的绝对值为 3 nm。误差标准偏差为0.002 8 μm,最大线性误差为0.003%。

图6 X与Y轴步进实验Fig.6 X and Y axis stepping experiments
Z轴行程测试系统稳定性测试结果如图7所示。读数在±4.1 nm内波动,平均值为1.08 nm。因此测量系统的稳定性较高。

图7 Z轴稳定性实验Fig.7 Z axis stability experiments
对Z轴行程0到40 μm的步进实验数据进行处理,得到拟合的直线,结果如图8所示。定位平台的Z轴行程的最大值为45 μm,线性拟合方程为y=0.999 41x+0.012 8。图8显示了实验值与拟合方程之间的误差,最大误差的绝对值为5 nm,最大线性误差为0.0125%。
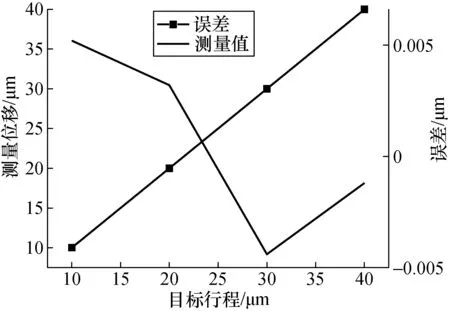
图8 Z轴步进实验Fig.8 Z axis stepping experiments
为了确定定位平台的的位移分辨率,PZT用于驱动以5 nm的步长移动。实验结果如图9所示。平台由着明显的太久。因此,平台最小位移分辨率小于5 nm,满足设计要求。

图9 分辨率实验Fig.9 Resolution experiment
定位平台的的输入与输出关系如图10所示。可以看出X与Y方向上的位移放大比为3.6,Z轴方向上的位移放大比为3.5,且当位移增加到一定值时,位移放大比会有所减小。

图10 输入与输出关系曲线Fig.10 Input and output curve
从以上实验数据处理结果可以看出:实验测量系统稳定,实验测量结果可靠,X、Y和Z轴在三维方向上的位移性能满足平台的行程要求,并且位移过程中的累积误差很小。可以满足定位平台的工作需要,确保定位平台的正常运行。
6 总 结
定位平台以低集中应力的叠加柔性铰链为导向机构,在保证结构强度的同时提高定位精度。X、Y和Z运动方向通过并联机构实现独立位移。根据推导得出的理论解析公式,确定相应的结构参数。基于机械结构模型,构建了电容传感器测量系统,用于定位平台的行程测量实验。实验结果表明:定位平台在X与Y轴方向上的行程为110 μm,分辨率为5 nm,在Z轴方向上的行程为45 μm,分辨率为 5 nm,可以满足工作需要,设计可靠。
