无人机机载LiDAR 在铁路勘测中的应用探讨
2020-12-17聂虎啸
聂虎啸
(中国铁路设计集团有限公司,天津 300251)
随着高速铁路的快速发展,铁路勘测的任务越来越重,工期越来越紧,给既有航测技术带来巨大挑战。近年来,随着无人机机载LiDAR 技术的逐渐成熟,将其应用于铁路勘测项目中,可有效弥补有人机机载LiDAR 在该领域应用中的不足,发展前景十分广阔。
1 现状分析
1.1 铁路勘测现状分析
大比例地形图、纵横断面测绘等是铁路勘测阶段的重要工序。 随着技术的发展,这些工序的完成方式从数码航空摄影测量到有人机机载LiDAR,再到三角翼搭载轻型LiDAR,尽管技术不断进步,但仍存在如下问题。
(1)受天气影响大
常常会由于天气原因,如多云天、雨天、雾天等,导致项目停滞不前,尤其是项目刚好处于南方梅雨季节。
(2)空域申请费时费力
由于有人机的飞行高度较高,常常需要申请空域,目前空域申请流程较为复杂,给项目的顺利开展带来困难。
(3)项目成本较高
目前有人机飞行平台多由通航公司提供,价格较高,日费用高达10 万~20 万元。
1.2 机载LiDAR 应用现状分析
机载LiDAR(Light Detection And Ranging)是一种新型的综合应用激光测距技术、全球定位系统(GNSS)、惯性导航系统(IMU)、数码相机等光谱成像设备于一体的航空遥感系统[1-4]。 机载LiDAR 的应用研究越来越多,杨卫从检校方法、测距误差精度评定、LiDAR 数据处理质量控制与评定三个方面,详细研究了有人机机载LiDAR 在高山区水电工程中的应用[5];杜磊等利用有人机机载LiDAR 构建精细DEM,有效地获得三峡库区张家湾滑坡群的滑坡信息,认为机载激光雷达技术是一种直观、快速而经济的地质灾害调查与监测的方法[6];叶松等将LiDAR 技术与土地调查工作相结合,丰富了土地调查的技术手段[7]。 随着无人机软硬件技术的迅猛发展,无人机飞行平台以机动性强、结构简单、成本低等优点,逐渐占据机载LiDAR 平台。 如:郑长春等研究无人机机载LiDAR 在公路勘测中的应用[8];陈利明将无人机机载LiDAR 应用于电力巡检中,取得了良好的效益[9];胡小青深入研究了无人机机载LiDAR 在山洪调查中的关键技术[10]。 图1 和图2 分别为动力三角翼、无人机搭载激光LiDAR的照片。

图1 动力三角翼搭载激光LiDAR

图2 无人机搭载激光LiDAR
上述研究表明,机载LiDAR 已成功应用于高山区水电工程测绘、土地调查、滑坡调查、公路勘测(交通)、电力巡检(电力)、山洪灾害中(环境)等领域,取得良好的效果和社会效益。 然而,无人机机载LiDAR应用于铁路勘测项目中的相关报道较少。 因此,对无人机机载LiDAR 在铁路勘测项目中的应用进行深入研究很有必要。
2 无人机机载LiDAR 数据处理及应用
2.1 数据处理
无人机机载LiDAR 的数据处理主要包括点云预处理和点云滤波,其中,点云预处理主要目的是获得不含误差的的点云数据,点云滤波的主要目的是获得分类点云数据,为后续生产提供基础数据。
(1)数据预处理
机载LiDAR 获取的原始数据并没有三维坐标信息,需进行预处理。 其预处理过程如图3 所示。
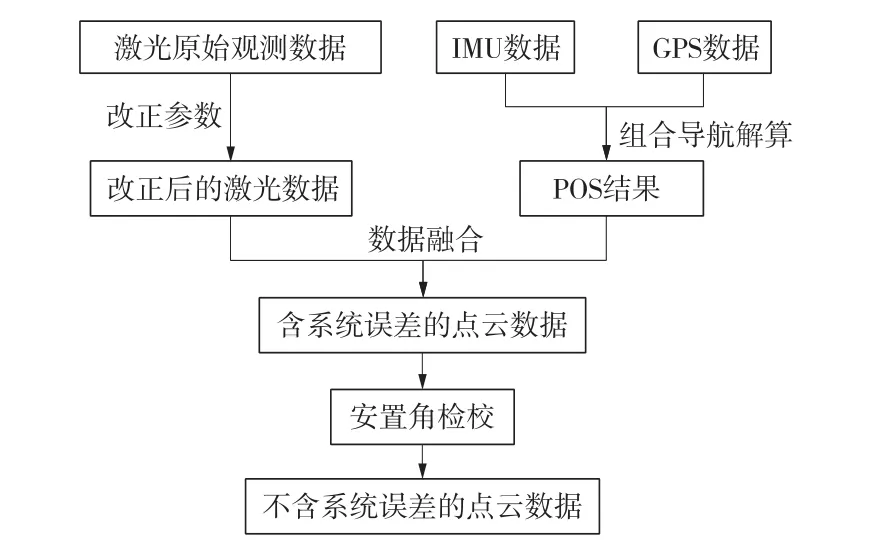
图3 LiDAR 预处理流程
由图3 可知,将原始的激光观测数据利用改正参数进行修正,即得到初步点云数据,该过程可以去除一部分系统误差。 利用精确的pos 将改正后的点云数据做进一步处理和点云航带间匹配检查,得到的点云仍然存在安置角误差的影响。 选取测区内有尖顶房、平坦公路的检校场地对LiDAR 设备进行安置角检校,利用检校参数再次对点云数据进行改正,可得到不含系统误差的点云数据。
(2)点云滤波
点云滤波是指通过一定的算法模型,从无人机机载LiDAR 的激光点云数据中分离出地面点的过程。算法主要有:数学形态学滤波法、移动窗口法、迭代线性最小二乘内插法、顾及地形坡度的滤波法和渐进不规则三角网法等[11-15]。 以常用的点云数据处理软件Terrasolid 为例,其点云滤波是基于渐进不规则三角网算法实现的,该算法执行效率高,算法稳定,具有一定的可靠性与实用性。 该方法的主要工作原理如下:首先通过设置范围值选取少量点作为地面种子点,构建初始不规则三角网;然后通过点云到三角网的垂直角度和距离,判断其是否处于设定的阈值内,如果在,则认为其是地面点,加入到地面点集合中,重新构建三角网;其次然后再对其他点进行判断,如此迭代,直至得到一个最优的地面点模型。 因此,基于该算法的点云滤波效果主要取决于距离和角度阈值的确定,需根据经验不断尝试。
构网参数示意如图4 所示,距离为当前点与三角形面的垂距,一般设置为1~2 m;角度为当前点与投影所在的三角形的最近顶点的连线与三角形面的夹角,一般设置为6°~10°。 在点云覆盖的区域植被较多时,应将距离和角度的值降低,以防将低矮植被误分为地面点。
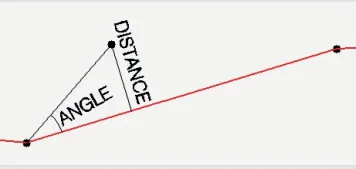
图4 构网参数示意
2.2 数据应用
(1)高精度DEM 制作
利用处理后的点云数据,可采用GlobalMapper、EPS、INPHO 等软件,构建高精度的DEM。 通过机载LiDAR 点云构建高精度DEM,是对既有航测技术的有效补充。
(2)地形图制作
在铁路勘测的定测阶段,常常需要线位两侧大比例地形图成果,采用无人机机载LiDAR 航测技术,一方面可通过其搭载的数码相机获取影像数据,经处理可得到地形图的矢量数据;另一方面,利用点云数据可用于地形图等高线和高程点的制作。
(3)横断面制作
在铁路初定测阶段,横断面测量是必不可少的工序。 铁路横断面是指中线上各点的法向切面,其水平投影为横断面轴线,横断面轴线左右两侧的端点为断面范围。 比如,横断面可用于路基挡墙位置设计、隧道仰坡排水沟设计、土石方计算等。 目前,铁路纵横断面的测量方法有:实测法、航测法、机载LiDAR 技术。 利用无人机机载LiDAR 获取的点云数据制作纵横断面,首先要基于点云滤波分离出的地面点构建不规则三角网(TIN)模型;其次是基于TIN 模型和断面线获取横断面成果,传统的做法是采用等间距采样的方法,通过该方法得到的特征点与实际特征点会存在误差,且其冗余计算较多。 文献[11]提出基于叉积和Q(x,y)函数的横断面获取算法,直接求取横断面轴线与三角形边的交点,三角形边正好是两个不同坡度面的交界,该交点正是横断面地形变化点。 计算过程中,从边桩到中桩不会出现地形变化点遗漏或重复计算,获取的横断面更准确。
3 应用实例
为进一步探讨无人机机载LiDAR 在铁路工程项目中的应用流程,选取某铁路专用线作为实例进行介绍。
3.1 项目背景
该项目位于北方地区, 项目需求主要是1 ∶2 000 地形图和横断面。 由于空域协调难度较大且工期较紧,无人机机载LiDAR 是该项目的最优之选。采用的无人机是成都纵横CW30,激光LiDAR 设备为RIEGL 的VUX-1。 飞行高度为390 m,航带间距380 m,激光雷达发射频率400 kHz,激光雷达视角为60°,飞行天气为阴天,地速为2 ~3 m/s,空速为5 ~6 m/s,空中无人机姿态稳定。
3.2 LiDAR 点云数据处理及精度评定
(1)点云消冗
数据预处理后,激光点云整体密度满足项目需求。但局部点云密度分布不均匀,经分析,由于无人机平台结构简单,飞行过程中受风力影响较大,导致飞机姿态不稳。 从整体看,在航带重叠处,点云密度明显高于未重叠处,这样会导致点云成果精度不均匀。 可采用点云消冗的方法解决,大致过程如下。
首先,考虑到航带边缘处点云精度相对较差且点密度较低的问题,应去掉航带边缘的点云,一般选择相邻航带重叠区域的10%~20%,具体应视点云边缘处数据质量而定。
其次,采用基于连接线的LiDAR 点云航带间平差方法对点云进行处理,通过在两条相邻航带重叠区域以同名点构造及同名连接线计算点云的系统偏移量,以实现点云数据的精确校准。
最后,对重叠处点云设置阈值较为严格的参数进行低点和噪点滤波,一方面提高点云精度,另一方面达到平衡点云密度的效果。
图5 为采用上述点云消冗方法后,部分点云数据的前后对比。
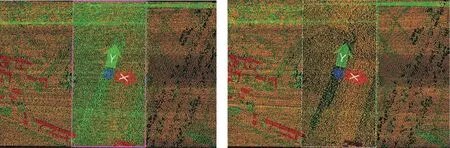
图5 点云消冗前后对比
(2)点云穿透力评定
点云穿透力是评价激光LiDAR 设备的一项重要指标。 为评价本项目点云的穿透力,选取面积约0.6 km2的一块点云数据作为基础数据,该区域植被覆盖率接近70%(如图6 所示)。

图6 被选取区域点云效果
经统计,该区域整体点云密度为7.33 个/m2;地面点点云密度为3.19 个/m2,满足项目需求。 由此也可看出,点云穿透效果良好。
另外,利用该区域点云进行横断面生产,并与外业实测数据进行对比,高程精度可满足0.3 m 较差的精度要求。 选取其中一个点云剖面和实测断面进行对比,如图7、图8 所示。

图7 点云剖面
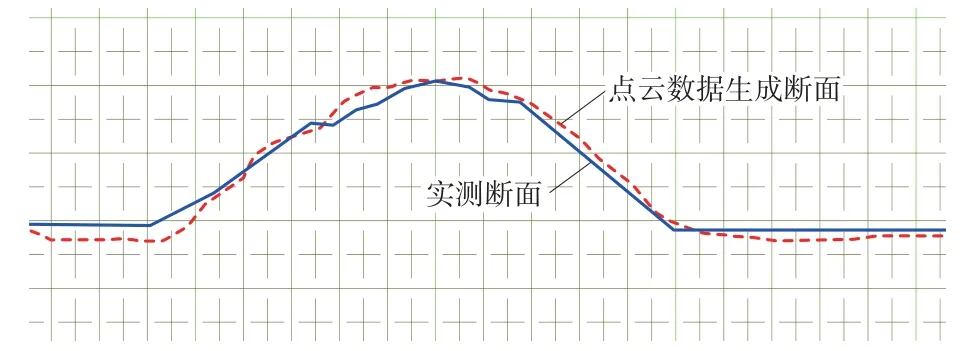
图8 横断面对比
(3)点云精度评定
采用基于渲染点云和地面控制点对比的精度评定方式,分别对点云的平面和高程精度进行评定。 本项目采用的高精度的IMU 和GNSS 系统保证了POS 的精度,而POS 的精度直接决定点云的精度。 选取部分测区进行统计,精度对比结果如表1、表2 所示。
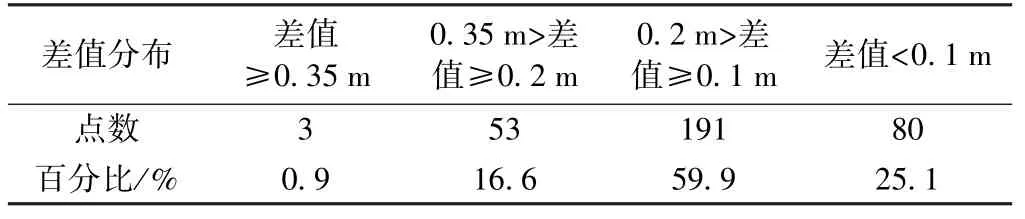
表1 平面精度比较差值分布
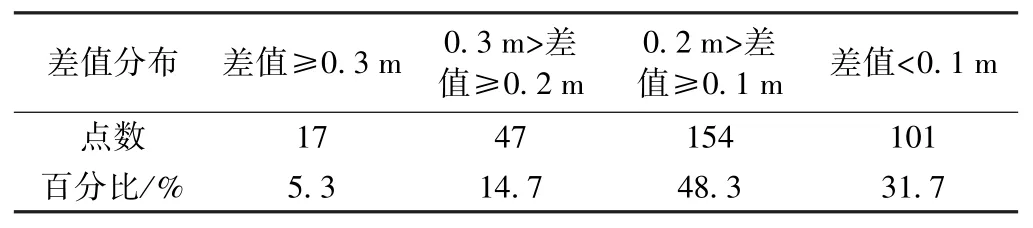
表2 高程精度比较差值分布
由表1 可知,平面精度良好,可满足生产要求;由表2 可知,高程精度高于0.3 m 的点云占比5.3%。 经分析,这些点多分布于有植被的地方,受植被影响,其点云精度低于其他地方。
4 结论
(1)无人机搭载激光LiDAR 具有机动性能好、环境适应能力强、精度可靠等优势。 将其应用于铁路勘测中,可作为传统数码航空摄影、有人机机载LiDAR、三角翼搭载轻型LiDAR 等航测技术的有效补充。
(2)通过点云消冗的方法,可有效消除航带重叠处点云密集情况,并能剔除部分系统误差和粗差,保证点云成果整体精度的可靠性和均匀性。
(3)点云滤波是点云数据的关键工序,其参数的设置多依赖于经验,研究自适应性强的自动分类滤波算法十分必要。
(4)无人机机载LiDAR 点云精度可靠,绝对精度高,可用于铁路勘测高精度DEM 制作、地形图制作、横断面等实际生产。
