无人机综合技术在某艰险山区铁路勘测中的应用
2020-12-17葛玉辉
葛玉辉
(中国铁路设计集团有限公司,天津 300251)
1 概述
某艰险山区铁路大渡河桥位于四川省甘孜藏族自治州泸定县,桥梁全长1 294 m,主跨长1 060 m,桥面距河面375 m,其周边地形环境复杂,桥位比选困难。为了更好地开展大渡河桥高中低桥位比选咨询工作,决定利用无人机航飞来解决其难点问题[1-4]。
近年来,无人机在铁路工程中的应用非常广泛[5],冯威认为利用无人机可高效获取高海拔山区的勘测资料[6];吕晓煜利用无人机对铁路沿线进行机载LiDAR 航摄,并对出现的技术问题给出解决方法[7];方留杨等使用无人机对昆楚二级公路某拱桥、高海高速海口大桥、观音山大桥开展了无人机三维建模和检测试验[8];在武汉天兴洲长江大桥桥索聚乙烯(PE)保护套外观检测中,梁亚斌等利用无人机进行拍摄,取得了良好的效果[9]。 以下基于前人的研究,利用无人机综合技术相结合的方法,对某艰险山区铁路大渡河桥位方案进行研究。
2 技术路线
大渡河桥位地处青藏高原向四川盆过渡地带,环境恶劣,地形复杂,4 km 的航飞范围高差达1 000 m(呈V 形),造成无人机信号遮挡严重;大渡河两侧山体呈S 形走势,不利于航线设计,造成起降场选择困难,像控点布设和测量困难;同时,地形高差大易导致影像分辨率、像幅大小、点云密度不均匀,不利于后期的数据处理。 另一方面,各专业对航飞需求不同,桥梁专业需要利用三维实景模型展示桥梁优化设计成果;隧道专业需要三维展示隧道进出口设计优化成果;站场专业需要在三维实景模型上展示设计优化成果。 考虑大渡河跨河大桥、泸定站以及隧道设计的周边地形环境,采用单一的测量技术方案很难满足专业全部的需求。 因此,决定采用无人机倾斜摄影测量、无人机视频和摄影技术、无人机激光雷达相结合的技术方案进行三维系统的航飞,具体步骤如下。
(1)制定无人机倾斜摄影和激光雷达的拍摄方案,采用旋翼机大疆精灵4pro 对测区进行详细的拍摄和踏勘,采用大疆M600+五镜头对测区站场范围进行优于0.05 m 的倾斜影像拍摄,建立实景三维模型。
(2)采用无人机激光雷达对隧道洞口和整个站房部分进行拍摄,得到整个测区的三维模糊和隧道进出口地形图;另外,根据线路专业的要求,对整个测区山体进行视频拍摄,获取重点区域的的静态照片和动态视频。 其技术路线如图1 所示。
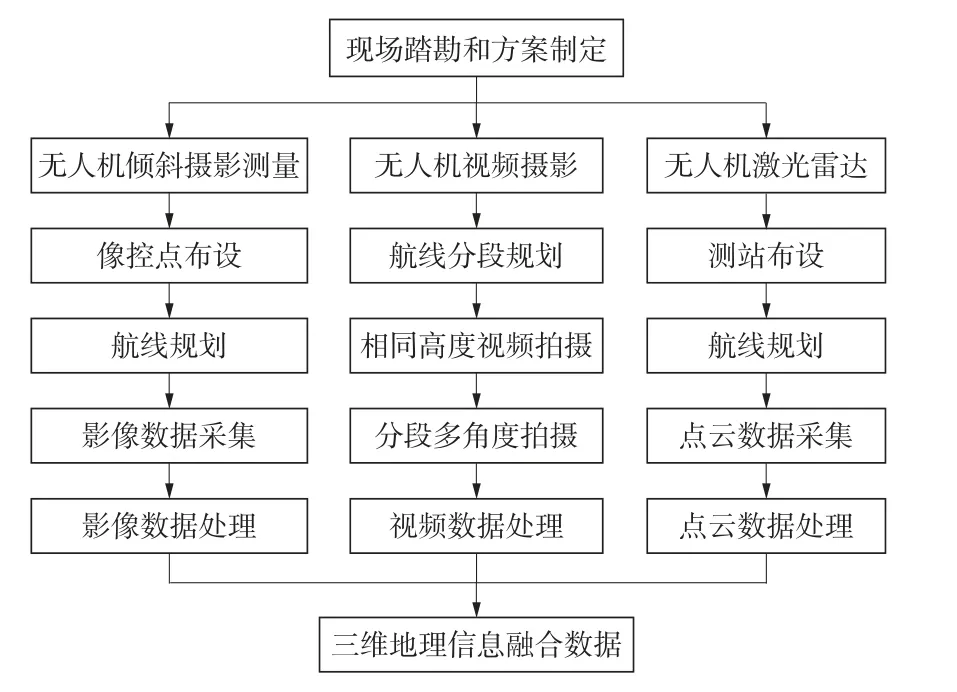
图1 技术路线
3 航摄情况
3.1 工程概况
某艰险山区铁路泸定站及大渡河位于四川省甘孜藏族自治州东南部的泸定县内,地处青藏高原向四川盆地过渡地带,东与天全、荥经接壤,西与康定、九龙毗邻,南连石棉县,是进藏出川的必经之地。 受东南、西南季风和青藏高原冷空气双重影响,气候垂直差异明显,早晚温差达15 ℃。 另外,航飞区域位于两个高山之间,周边地势高差大,坡面短,坡度陡峭,岩体破碎,且山上分布有高压线,给外业航飞和内业处理带来很大困难。 某艰险山区铁路大渡河线位走向如图2 所示。

图2 某艰险山区铁路大渡河线位走向
3.2 设备选取
为了满足不同角度的拍摄需要,视频和摄影方面,选择具有仿地拍摄功能的大疆精灵4pro(2000 万有效像素);倾斜摄影选择大疆M600+AMC536(5 镜头)相机,AMC536 相机由1 台正拍相和4 台倾斜相机组成,正拍相机负责垂直地面拍摄,倾斜相机一般采用45°倾斜拍摄。 对于同一区域,只需飞行一个架次即可获得垂直拍摄及东、南、西、北4 个方向的倾斜影像,可以满足各种条件下的航测拍摄,对于高差悬殊,环境恶劣的地区效果较好; 激光雷达选择华测金刚6 +AS1300HL,其具有较好的安全性能和稳定性。
为了保证安全和效率,应提前设计航线,航线布设需满足以下原则:①保证LiDAR 点云数据旁向重叠度50%~70%;②保证影像旁向重叠度 30% 以上,航向重叠度 60%以上;③保证影像地面分辨率优于0.1 m;④保证LiDAR 点云密度5 个/m2;⑤保证航飞数据采集效率及飞行安全高度。
对应的倾斜摄影航飞参数见表1。

表1 倾斜摄影航飞参数

续表1
3.3 像控点测量
所有像控点成果均利用当地CORS 网络,采用RTK 方式进行测量,每点均独立初始化4 次,每次在连续地形测量模式下观测30 个历元,每个历元采样间隔为1 s, 取其平均值作为点位的最终坐标成果。 激光雷达基准点为测区已知精密控制点。 其测量精度水平误差最大为5 mm,垂直误差为6 mm,均满足测量规范要求,某艰险山区铁路大渡河像控点和检查点成果精度分析见表2。
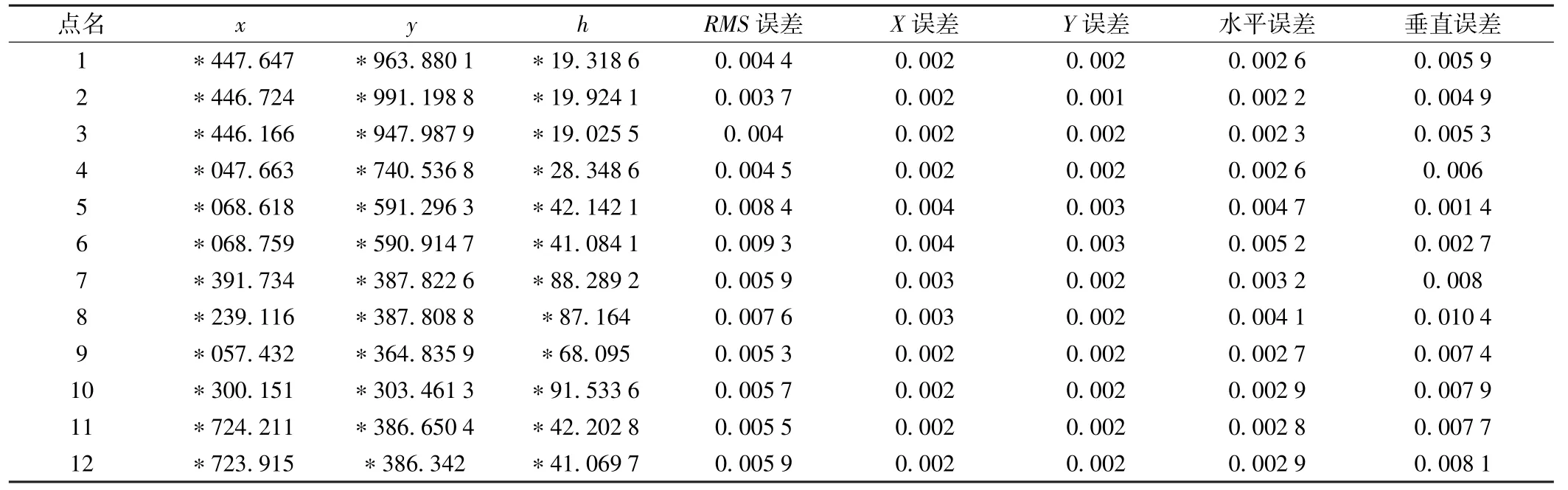
表2 某艰险山区铁路大渡河像控点和检查点成果精度分析 m
4 基于大渡河无人机综合技术三维模型
4.1 无人机倾斜摄影测量
根据站场专业要求,对站场区域按1 ∶500 的精度进行精细化航飞,因航飞区域高差悬殊,根据精度要求,将倾斜摄影航飞范围分成了3 部分,分别进行航飞,泸定站站房大渡河的航飞范围如图3 红色区域。

图3 泸定站大渡河站场航飞范围
为有效提升空三的效率和质量,选择Context Capture Center 软件进行数据处理,对倾斜空三部分进行了加强,经过严密的数据处理,空三成果符合精度要求,控制点坐标与模型上实际的点的坐标对比精度也符合精度要求,其成果能够满足1 ∶1 000 和局部站场范围1 ∶500 测量要求(见图4、图5)。

图4 倾斜摄影第一架次的模型细节

图5 倾斜摄影模型总览
4.2 无人机视频和摄影技术
根据线路、桥梁等专业要求,为了保证近距离的视频拍摄效果,充分利用天地图、谷歌地球等手段研究测区整体方案,针对山坡陡峭、高差巨大的现状,采用分段、仿地飞行方案,把航飞区域分成多个区域,根据航飞的路线适当调整航飞高度,尽量保证同区域的相对航高相同。 为了保证近距离的视频拍摄效果,将整个横跨大渡河4 km 的线位分成了8 段,进行不同高度的视频拍摄,为更好地表达整体的效果,又进行了相同高度的视频拍摄。 视频拍摄的现场情况如图6、图7所示。

图6 大渡河航飞区域

图7 布满了高压线的航飞区域
4.3 无人机激光雷达技术
为减少山体和高压线对无人机飞行的影响,采用先预飞(采用小型视频无人机)、后实飞的方案;为了得到高精度的雷达数据,首先对对激光雷达进行了航飞前的标定,划分了4 个航飞区域;为解决后续数据处理的难题,利用倾斜摄影、激光雷达等不同的数据处理手段相互印证和纠正,反复的进行测试和处理,保证成果的准确性,其激光雷达成果细节和三维合成模型如图8、图9 所示。
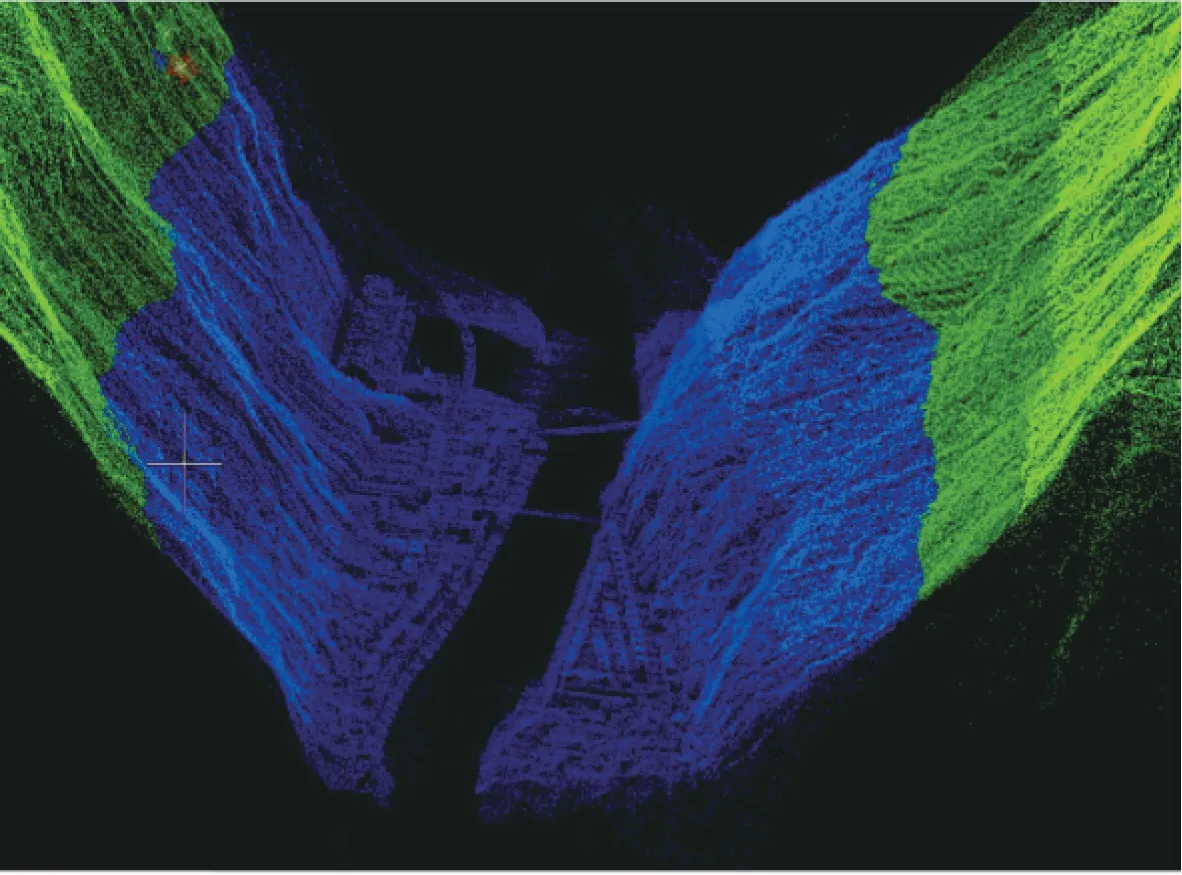
图8 激光雷达大渡河细节点云
5 结束语
通过无人机多技术融合方法在某艰险山区铁路大渡河中的应用,探索倾斜摄影测量、视频和摄影技术、激光雷达技术各自的技术优势,可有效提高建模效率和模型精度,及时准确提供大渡河桥及沿线的实景三维模型等资料;利用倾斜摄影测量实景建模技术可生成站场站房范围三维模型,有效查明了线路走向、周围环境、建筑对方案的影响。 研究表明,激光雷达技术和倾斜摄影相结合,可使建筑密集区的三维实景模型精度达到5 cm。

图9 基于彩色点云的三维模型
