航母气流场数值模拟方法研究
2020-12-17秦江涛
於 菟 秦江涛 方 乐
(中国舰船研究设计中心1) 武汉 430064) (武汉理工大学交通学院2) 武汉 430063)
0 引 言
舰载机起降特别是降落时的安全问题是航母与舰载机飞行控制系统设计中关注的重点与难点问题[1].由于以下原因舰载机的降落较陆基飞机更为困难与危险:①跑道尺度受限及拦阻降落方式导致载机着舰位置限制严格从而冗余较小;②舰船六自由度运动改变甲板与载机的相对位置以及着舰区域气流场;③飞行甲板及上层建筑的非流线外形导致下滑道区域为较复杂的空气尾流场;④舰载机的着舰速度较陆基飞机更低,抗气流场干扰能力更弱[2].
舰船气流场是影响航母与舰机适配性能优劣的关键[3].舰载飞机进近与着舰时航母尾流和甲板风是影响载机航迹保持十分重要的因素,舰船空气尾流场的准确预报也是寻找最佳进场和安全降落路线、预测降落风险等问题的先决条件.
从上世纪60年代起,国内外学者针对舰船空气尾流场流场特征进行了大量的研究.理论分析、实船测量、缩比模型的风洞实验,以及CFD数值模拟是研究的主要手段.由于流场控制方程的高阶非线性偏微分特征导致该问题尚无解析求解的技术手段;实船测量是获得舰船周围真实气流场数据直接有效方法,但该方法的经济与时间成本高、重复性差、测量手段单一且捕捉的流场信息不丰富等问题限制了该方法的广泛应用[4];缩比模型的风洞实验也被广泛应用于舰船空气尾流场预报[5],但由于试验条件限制,黏性力的相似准则不能满足导致不同程度的尺度效应,且风洞试验中也难以实现船体运动状态下的模型试验;CFD数值模拟从上世纪末开始成为研究舰船空气尾流场特性的有效手段,该方法解决了风洞试验中船体运动实现的问题及尺度效应问题,并由于其效率与成本优势,随着CFD技术的进步逐渐成为舰船气流场研究的主要手段[6-7].
基于CFD数值模拟方法,学者开展了不同研究对象的研究:如上层建筑尺寸与位置对气流场的影响[8]、甲板风向风速对航母气流场的影响[9]、船体运动的影响[10]等,得到了许多指导船舶设计与载机飞行控制设计等方面的有效结论.
本文以航母气流场为研究对象,讨论了网格类型、网格密度以及湍流模型对气流场数值结果的影响,并基于数值结果分析了典型区域气流场对其载机降落气动特性的影响.
1 数值模型与方法
1.1 控制方程
舰船航行与来风导致的气流场流动物理问题控制方程为NS方程组.由于马赫数低,认为流体不可压缩,在笛卡尔坐标系中根据质量守恒与动量守恒定律航母气流场流动问题的控制方程为
(1)
(i、j=1,2,3)
(2)
1.2 湍流模型
由于控制方程(2)高阶非线性的特征导致尚无解析求解的手段;湍流流动参数的高频脉动特性则对直接数值模拟(DNS)方法在网格密度与时间步长方面有较高的计算资源需求,近期尚无工程应用的可能.目前湍流的数值模拟多采用非直接的模拟方法,包括大涡模拟(LES)和雷诺平均.大涡模拟相对而言对计算机硬件的要求较高,应用于实际工程的计算尚不多见;雷诺平均方法是采用非稳态的NS方程对时间作平均来描述湍流,称为Reynolds平均法或RANS方法.由于RANS动量方程中出现了未知的雷诺应力项,为表达式中的雷诺应力,需要建立一定的模型.目前工程应用比较广泛的湍流模型有涡黏模型和雷诺应力模型.DES(分离涡)模型结合了RANS模型与LES方法,在近壁区域使用RANS方法解决计算效率问题[11],DES方法的计算成本高于RANS,但远低于LES.
1.3 近壁处理与壁面函数
由于近壁面流动的切向速度等流动参数沿边界层法向变化较快,同时近壁面的流动通常是重点关注的研究对象,因此近壁面流动的准确捕捉对有固壁边界限制的湍流模拟至关重要.通过试验研究发现,从壁面沿法线方向向外,可以将湍流边界层分为流动呈层流状态的粘性底层;距壁面最远的湍流充分发展流域,称为完全湍流区,也称为核心区;二者之间称为过渡层(buffer layer),在过渡层中黏性力和惯性力的影响相当.近壁面湍流边界层的速度(量纲一的量)分布见图1,根据此速度分布规律构建速度与距壁面法向距离关系的方法则称为近壁模型方法.

图1 湍流边界层的近壁速度分布示意图
本文针对舰船气流场数值模拟中的近壁处理采用壁面函数方法.
1.4 计算域与边界条件
舰船绕流场数值模拟的计算域采用长方体区域,其中入口边界距船体约2倍船长,出口边界距船体约4倍船长,其他方向则取约10倍船宽.远场边界采用速度入口与压力出口的边界条件组合.
1.5 方程离散与求解
数值模型的建立需对整个流体区域将偏微分方程组离散,并按一定的物理定律或数学原理构造与控制方程相容的离散代数方程组.在建立数值模型基础上,通过数值方法求解离散代数方程组,并以各网格节点处的离散场变量分布近似代替原微分方程组的解析解.目前通用流体计算软件最常用方法为有限体积法.
1.6 空间离散网格
流体域的网格空间离散是构建控制方程离散代数方程组的基础,网格的空间离散按照网格节点的储存形式可以分为结构网格和非结构网格两种.为了高效准确的模拟复杂几何边界,随着CFD网格划分方法发展形成了以四面体网格为代表的非结构化网格,其对复杂边界控制域有很好的适应性,但四面体网格填充效率不高、插值误差较大且在计算过程中需要消耗更多处理器和内存来计算和储存节点的几何位置.切割体网格(CutCell)是近10年来新发展起来的一种网格划分技术,由于其生成简单,且兼具结构化网格的较高网格质量和非结构网格的复杂表面适应性,得到了广大CFD 学者关注.Poly-Hexcore网格类型是FLUENT 19版本在离散网格方面的新增功能,该网格类型在计算域的绝大部分采用六面体网格,此特征与CutCell网格类型一致,但与CutCell网格相比其在边界位置不是“切割”生成面网格,而是由多边形(通常为六边形)的面网格向外进行边界层网格增长;在边界层网格与笛卡尔网格之间则借助多面体网格进行过渡.因此该类型网格除具有较高的填充效率外,还具有较高的网格质量.
2 数值结果与分析
为便于不同工况的比较,压力及受力均以无量纲系数的形式给出,其中受力系数为
(3)
式中:Fi为笛卡尔系中i方向受力;ρ为流体密度;V为特征速度(取来流速度);L为船长.
压力系数定义为
(4)
式中:p为不考虑大气压的相对压力.
2.1 网格类型对数值结果的影响
采用结构化六面体网格与较新的Poly-Hexcore网格进行数值模拟,其中船舶航速为24 kn,右前与速度方向呈30°角来风,风速为20 m/s.数值模拟中缩尺比统一为40,绕流雷诺数为7×106.
数值模型中采用的结构化六面体与Poly-Hexcore网格的典型剖面分布见图2.

图2 分块网格分布
采用相同网格船体面网格与近壁法向尺度情况下Poly-Hexcore网格模型的网格数约为730万,六面体结构化网格数量约为680万.网格质量方面结构化六面体网格模型的网格Skewness(倾斜比)最大值约为0.3,Poly-Hexcore模型中网格质量最差的Skewness约为0.7.另外Poly-Hexcore类型网格可在流场参数变化较快或重点关注的流场区域通过体积密度盒方式进行局部网格加密;而结构化六面体网格的局部加密会由于其组织形式影响整个计算域,从而往往导致较大的网格数量.
通过数值模拟,采用Poly-Hexcore网格与结构化六面体网格类型所得船体受力系数见表1.

表1 不同网格类型船体受力数值结果表
两种不同网格模型的船体表面压力分布与极限流线分别见图3~4;两种不同网格模型的漩涡结构对比见图5(涡核辨识采用λ2准则,λ2=-15).

图3 压力分布云图

图4 船体极限流线对比

图5 流场漩涡结构捕捉对比
由前述受力与流场数值结果的对比可见:在受力方面Poly-Hexcore类型网格与全结构化六面体网格相比差距不大;在流场细节捕捉方面,在网格数量基本相同时Poly-Hexcore类型网格模型由于可进行尾流区域的独立加密,其流场细节的捕捉较结构化六面体网格模型更为丰富.
2.2 网格密度对气流场数值结果影响
以俄制库兹佐涅夫型航母(舰岛及部分小尺度结构的几何进行了简化处理)为对象进行不同网格密度的数值模拟,对比网格密度对船体受力、局部压力以及尾流捕捉等方面的影响.其中对应船舶以24 kn航速运动,风速为30 kn,右前方30°夹角来风,见图6.

图6 数值工况示意图
典型剖面的网格分布情况见图7.

图7 横剖面网格分布
采用基于RANS的Relizablek-ε湍流模型对舰船绕流场进行了数值模拟,其中不同网格密度船体受力(系数)见表2.

表2 不同网格密度模型船体力系数数值结果
由表2可见,采用低密度网格的受力数值结果比高密度网格相差约2%,而中密度网格与高密度网格相比相差约1%;且从低密度网格到高密度网格其受力呈现出收敛性.
船体表面压力(系数)的分布云图与涡核结构(涡核辨识采用λ2准则,λ2=-15)见图8.
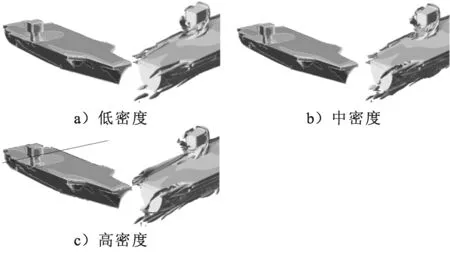
图8 压力分布云图(左)与尾流场漩涡(右)
根据以特定工况的船舶气流场不同网格密度模型的数值结果来看:①气流场局部细节随网格密度变化未见明显差别;②船体受力随网格密度略有变化,其中各向分力在当前三种网格密度模型中约变化1%~2%,且随网格密度呈较好的收敛特性;合力方面则由于受力变化较小收敛性不明显;③综上在本工况中(雷诺数约1.7×107)当超过800万网格后气流场数值结果基本与网格密度无关.
2.3 湍流模型对舰船气流场数值结果影响
通过数值模拟对比分析不同湍流模型对气流场细节捕捉的影响.网格离散方面采用POLY-HEXCORE与棱柱层网格形式生成网格,整个计算域的网格数量约为2 300万,船体面网格及典型剖面的网格分布见图9.

图9 船体面网格与横剖面网格分布
分别采用基于RANS的两方程模型及DES模型对该气流场进行了数值模拟.通过数值模拟,采用RANS模型与DES模型所得的受力情况见表3.

表3 不同湍流模型船体受力数值结果
基于数值结果,DES模型与RANS量方程模型相比其受力约相差2%.
RANS湍流模型与DES湍流模型的船尾漩涡结构见图10(λ2=-15).

图10 船尾漩涡结构
从不同湍流模型的漩涡结构捕捉来看, DES模型较好的捕捉到了大尺度漩涡破碎生成小尺度漩涡,并随来流向船尾传播等流场细节,而RANS模型中仅捕捉到了少量的长条结构的大尺度漩涡,且在RANS模型中漩涡过早的耗散.
2.4 尾流场特性
针对库兹佐涅夫航母的DES模型数值结果进行下滑轨迹气流场的分析.载机的理想下滑轨迹可由下滑轨迹角与着舰点定义,其中本算例中下滑角γ=-3.5°,侧滑角ψ=9°,示意图见图11.考察下滑剖面的流线分布与下滑轨迹沿程的速度分布分别见图12.L为舷长.

图11 下滑角与侧滑角示意图

图12 下滑轨迹垂向剖面流线分布和沿程诱导速度曲线
由图12a)可知,在舰尾出现先向下然后向上的“鸡尾流”的流线形态,并且在舰尾出现明显的漩涡.由图12b)可知(图中x=0为尾封板位置),随着舰载机向甲板运动,载机相对来流速度会降低(表现为正的x向诱导速度)且在距舰尾约0.1L位置有最大的诱导速度(约13.2 m/s),且在此位置附近出现最大的下洗速度(约-3.4 m/s),会导致舰载机的攻角变小,升力降低的受力特征.因此飞行控制系统需在较短时间内进行舵面控制以避免下滑轨迹偏离出现降落事故.
3 结 论
1) Poly-Hexcore类型网格生成过程中可采用局部加密的方式,在网格数量相当情况下,舰岛周围的流场细节捕捉要优于分块结构化六面体网格模型,受力方面则与之相当.
2) 航母气流场数值结果关于网格密度并不敏感,在论文涉及的工况中当网格数超过800万时数值结果与网格数量的相关性不大.
3) DES模型可较好的捕捉小尺度漩涡的结构,而RANS模型中仅能捕捉到少量长条结构的大尺度漩涡.
4) 航母舰尾出现“鸡尾流”的流线形态,舰载机在距舰尾较近时出现来流攻角变小的问题,并且在距船尾0.2L~0.1L位置出现来流由上升气流向下洗气流的急剧变化从而该风险最大.
另外,文中未考虑实际海洋环境导致的船体运动响应,而相关文献认为船体运动是导致舰载机降落阶段气流场变化的重要原因.因此,还应就海浪环境中航母船体运动气流场进行进一步的研究.