基于三维激光点云的既有建筑BIM建模方法研究与应用
2020-12-17刘胜男陶钧史艾嘉
刘胜男,陶钧,史艾嘉
(1.江苏城乡建设职业学院,江苏 常州 213147;2.常州市武进规划与测绘院,江苏 常州 213159)
1 引言
近年来,随着建筑行业信息化程度的逐渐提高,BIM(Building Information Modeling)技术被越来越为人们所熟知。BIM即建筑信息模型,是以建筑工程项目的各项相关信息数据作为模型的基础,进行建筑模型的建立,通过数字信息仿真模拟建筑物所具有的真实信息[1]。BIM以三维模型为载体,通过在模型中整合项目的各项信息,将建筑项目的设计、施工、运营管理等各个阶段串联起来,实现建设项目全生命周期内的建筑信息数据不断更新和协同管理。现阶段,BIM技术的主要应用集中于新建建筑的方案设计、施工模拟和成本管控等方面[2]。随着BIM技术的应用普及,如何快速获取高精度既有建筑几何模型,将BIM应用于既有建筑的运维管理中具有极强的现实意义。
2 既有建筑BIM建模的难点
根据数据的不同来源,BIM主要分为两类:一类是针对新建建筑,在建筑的设计阶段,依据设计数据建立BIM,实现建筑项目信息的整合,为业主、设计方、施工方等提供所需的信息,提高项目的完成效率,实现建筑全生命周期的管理[3]。另一类是针对既有建筑,通过现场勘测,对已经建成的建筑进行数据采集,进行实景建模,用于建筑物运营管理、后期维护和改造。
目前的BIM建模方法的研究主要是针对新建建筑的正向建模[4]。不同于新建建筑,既有建筑是已经建设完成,并投入使用的建筑,在BIM模型建立的过程中,存在着以下两个难点。
①既有建筑通常存在着资料缺失或因长年累月的变形而导致与竣工图纸不符等情况,这就意味着采用设计和竣工资料进行既有建筑BIM模型构建可操作性不高,建模精度也难以达到应用要求。
②既有建筑空间几何信息采集困难。用于BIM模型构建的建筑物空间几何信息必须有足够高的精度,能够准确反映建筑物的真实情况。采用传统测绘手段进行建筑信息,尤其是一些历史保护建筑信息采集时,受建筑造型和建筑细节影响,较难实现快速、高精度的建筑信息采集。
3 基于点云数据的既有建筑BIM建模方法
3.1 三维激光扫描技术
三维激光扫描技术又称“实景复制技术”,利用激光测距的原理,对目标进行三维坐标数据量测,获得完整的全景点坐标数据,这些连续的点数据被称作“点云”[5-6]。三维激光扫描技术区别于传统的单点式测量,采用了连续式、整体式的数据采集方式,具有测量速度快、精度高、使用方便等优点。运用三维激光扫描技术对既有建筑物进行外部和内部进行扫描,得到实体或实景的点云数据,进行相应处理,可以获取建筑物细节信息,快速构建建筑物信息模型[7-8]。三维激光扫描技术突破了传统单点式测量方式的局限,采用自动式采集方式,避免了人为误差和时间误差的影响,可以较好地应用于复杂建筑模型的构建。三维激光扫描技术与传统全站仪信息采集特点的对比,如表1所示。

三维激光扫描技术与全站仪特点对比 表1
3.2 基于点云数据的既有建筑BIM建模方法
①点云数据采集
依据建筑物结构特点和现场环境,设计合理的数据采集方案,使用三维激光扫描设备,完成点云数据采集。在数据采集过程中,受现场环境和扫描距离的影响,一般需进行多站扫描。应合理设计测站位置和测站数量,在保证点云数据完整的基础上,使用尽量少的测站进行数据采集,避免点云数据量过大以及测站数据拼接时的误差累积。
②点云数据预处理
获取点云数据之后,需要使用专业的点云数据处理软件对其进行去噪、拼接、分割等数据预处理[9]。将三维激光扫描技术应用于既有建筑的建筑几何信息获取时,建筑物周围的行人车辆、设备甚至空气中的尘埃都会在点云数据中留下断续跳跃的噪声点。进行点云数据处理时可以采用人工或者软件自动去噪的方式判别无效点云并进行删除[10]。另外,在进行多站扫描时,在各测站扫描重叠区域内会产生大量的冗余数据,需要进行消冗处理,减少点云数据量,提升后期建模效率。
③BIM软件链接点云模型
将三维点云数据进行格式转换为dxf、3ds、stl等格式,导入建模软件(如Revit、3Dmax、Sketchup)中,作为构件建筑模型的基础几何数据。需要注意的是在建模前,要根据建筑构件情况,将点云数据进行分割。
④模型构建
使用建模软件,根据点云数据的分布规律,将符合建筑构件表面几何特征规律的点云拟合为建筑构件模型,赋予模型名称、材质、颜色等属性信息,进而构建建筑整体BIM模型。

图1 基于点云数据的既有建筑BIM建模流程
4 应用实例
4.1 项目概况
常州武进莲花馆位于江苏省常州市武进区,占地面积达3.5hm2,是由坐落在人工湖上的二层市政设施的基础上进行扩建。之所以被称之为莲花馆,是由于其外观是三朵莲花造型的综合体,犹如盛开的莲花,花瓣主体部分采用钢结构建造。由于莲花馆结构复杂,并且投入运营,白天到夜晚都具有使用功能。为快速获取莲花馆建筑信息,完成BIM建模,实现场馆运维阶段的综合信息管理,因此采用以上基于三维激光点云的BIM建模方法,使用三维激光扫描技术获取点云数据,继而进行BIM模型构建。考虑到莲花馆作为教育、娱乐和社区集中艺术项目,为更好地再现莲花馆原貌,提高建模的辨识度和观赏性,在采集点云数据的同时进行了纹理信息的采集。

图2 莲花馆实景图
4.2 信息模型构建
①三维激光点云数据的获取
项目采用Trimble TX8三维激光扫描仪对莲花馆进行扫描作业。由于莲花馆造型复杂,为尽可能详细地获取建筑点云数据,扫描前,项目组对场馆进行了现场踏勘,并制定了详细的现场扫描方案,包括测站位置、扫描分辨率和标靶位置的设计。点云数据采集应分站进行,各测站间采用球形标靶进行配准,每一测站标靶不少于3个,同时对不同部位采取不同的扫描分辨率。
②三维激光点云数据预处理
点云数据预处理在Trimble三维激光数据处理软件Realwork中进行,将全部点云数据导入到软件中,进行自动拼接配准。在消除噪声时,对过往的游客、车辆等这类噪声,不能通过设置阈值的方式进行消除,因此采用人工识别进行消除。另外,由于采集的点云数据量较大,为了在满足建模精度要求的同时提高建模效率,项目组采用了分区域消冗的方法,对不同部位的点云数据进行了消冗处理。莲花会展中心为异形钢结构建筑,直接使用软件进行建模定位,工作量较大。本次建模还在Realwork中进行了关键控制点和参考线的定义,保证后续建模准确性和工作效率。莲花馆点云模型如图3所示。

图3 莲花馆点云模型图
③BIM的建立
BIM的建立选用芬兰Tekla公司开发的TeKla Structures软件进行。TeKla Structures是一个交互性的钢结构3D建模系统,用户可以在虚拟空间中搭建一个完整的钢结构模型并自动生成所需的钢结构详图和报表。TeKla Structures支持多种数据格式的输入输出,将预处理完成后的点云数据导入TeKla Structures软件中,在软件中定义构建几何模型,构件类型,赋予属性信息,进而形成整体莲花馆BIM模型。高精度的点云数据确保了莲花馆各构件几何信息的准确性,通过与设计图纸的对比,其外形尺寸误差均在厘米级。将模型数据导出,在3Dmax中完成纹理映射。形成的莲花馆BIM模型,如图4所示。
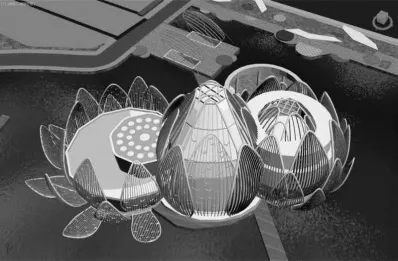
图4 莲花馆BIM模型
④模型精度分析
为了更好地评价本项目建筑信息模型精度,项目组选取了8组特征点,将特征点间的相对距离与全站仪测量的距离进行对比分析。选取测距精度为(2+2×10-6D)mm的高精度全站仪,使用免棱镜方法测出特征点间相应距离,与模型中距离对比如表2所示。
从上表中可以看出,8组特征点间全站仪测距与模型距离差值较小,均在20mm以内,可以满足大部分建筑三维模型的精度要求。
5 结语
既有建筑建模是因受建筑结构和建筑运营情况影响,建筑信息采集往往较困难。采用三维激光扫描技术可以快速有效获取建筑物空间几何信息,为准确地建立建筑信息模型提供可靠的数据源。文章研究了基于三维激光电云数据的既有建筑BIM建模方法和工作流程,以武进莲花馆项目为例进行了建模研究。通过对模型数据的分析可以看出,三维激光扫描技术可以广泛应用于既有建筑,尤其是结构较为复杂的建筑建模,实现建筑信息综合管理。
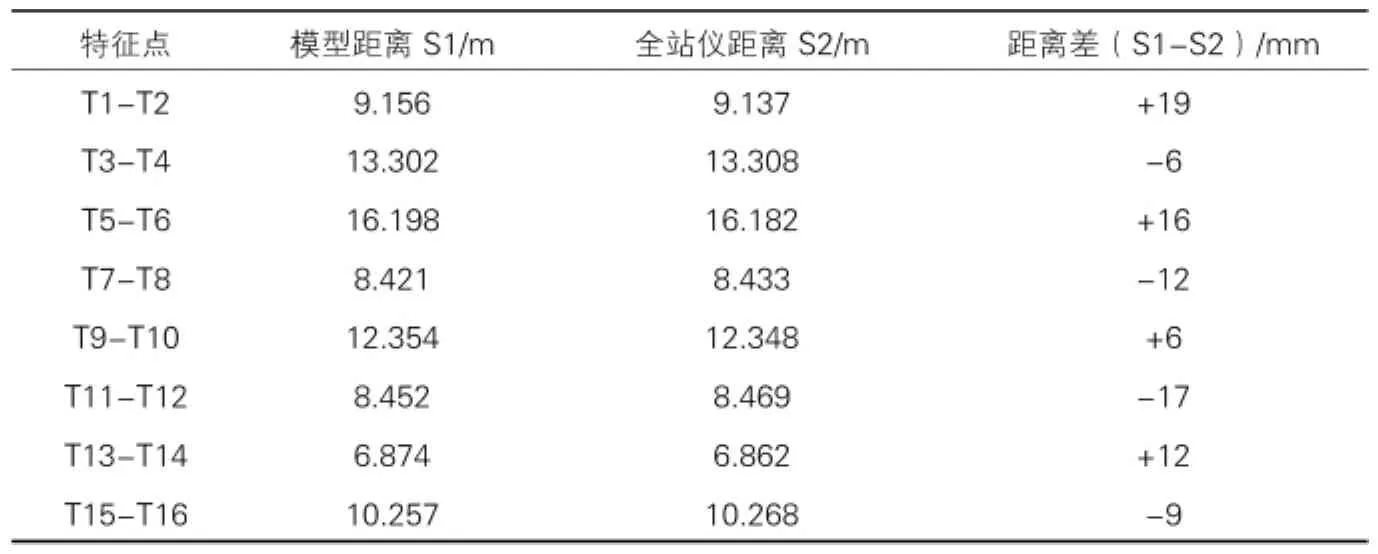
模型特征点间距离与全站仪测距结果对比 表2
